


Hi Fellas.
I haven't been here for a while but have been keeping up from time to time anyways I wanted to introduce my new robot.
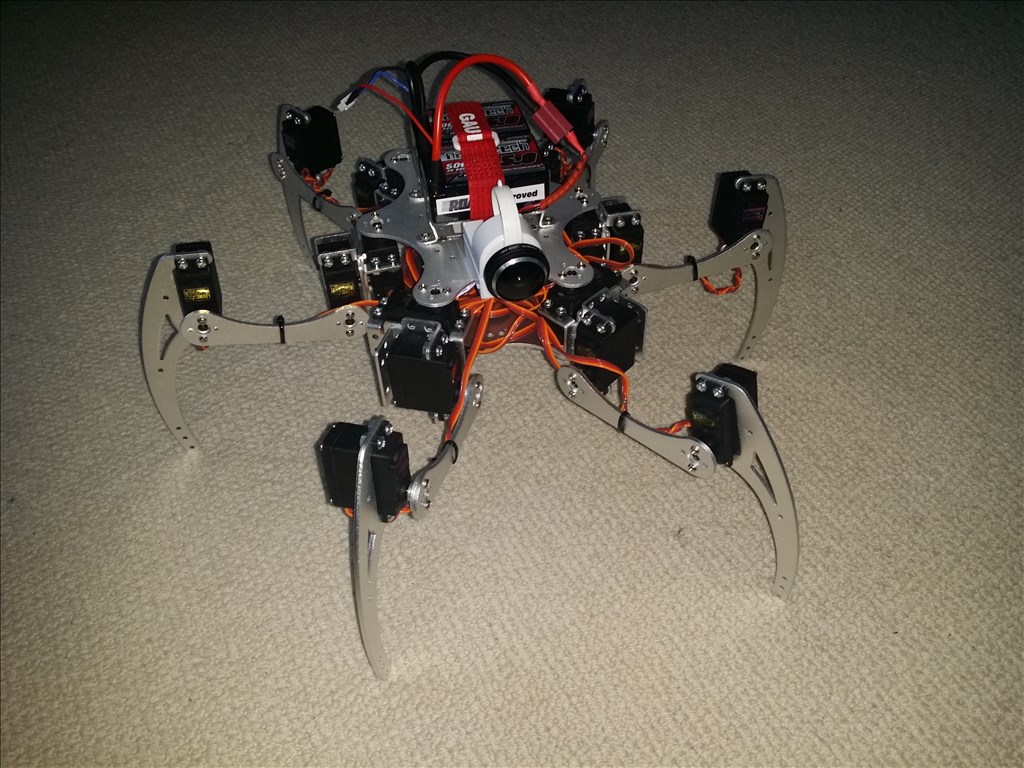
I wanted a nice Hex but I had issues with the Phoenix route so decided EZ-B was the way to go. So armed with a decent Chinese Aluminium Hex body I set to getting this thing built.
Today it took its first steps. I don't have a name yet but im sure it will come I put up some videos soon. ive just got to get it all connected again.
Im loving how easy it is to create programs with the ARC I had it walking in 2 hours
so here it is:

Im planning some sensors and maybe an attack Mode with fangs on another servo to chase the cats out of my garden.
thanks for reading. I hope the pictures are there this is my first upload...
Andre.
Discover more robots

Cardboardhacker's Ez-Ollie
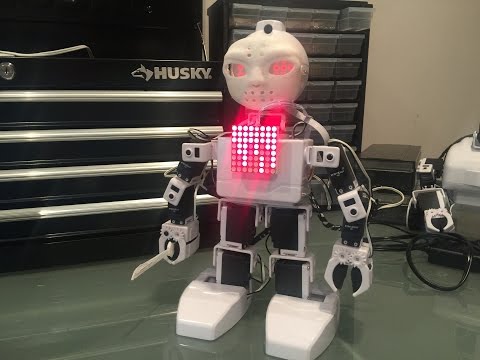
DJ's Jd's Friday The 13Th


very cool build robot.
the most smart spider off today calt portas,maybe a name ?
Oh I like this guy! Can't wait to see a video - he's gonna be great
like it. is that an add on lens for the camera if so where is it from
You are correct. It's a 10 deg fishery from that popular bidding site. I have yet to play with it but it looks pretty good so far
Andre.
Andre,
Nice Hexapod, very similar to mine, but mine is in black anodised Aluminum, see video below. I did find that with a heavy duty battery pack, EZB controller, and having 20x MG996R servo's ( 18 for legs and 2 for the senors ) did make it very heavy.
I'm running 2x 7.4v 5000 mah making 10000 mah. it lasts about an hour I haven't really timed it. It is quite heavy but it seems to be ok. And the last post should say a 180 deg lens
Andre
@cem that's real smooth! Blows away the Intel Hexapods.
@cem , What hexapod frame did you use? It resembles a Phoenix, but appears to be slightly different.