




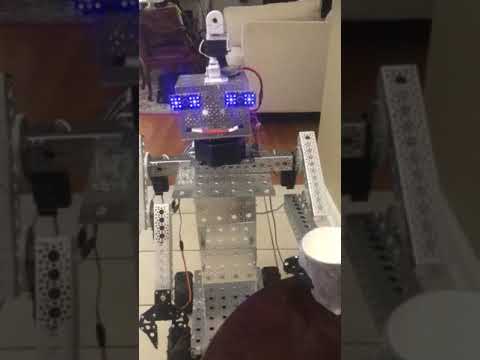











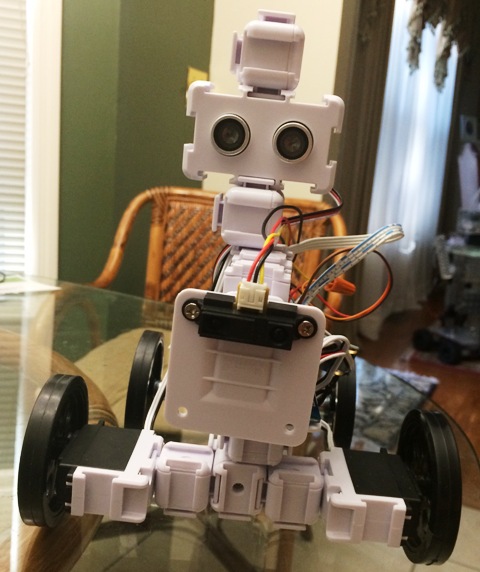
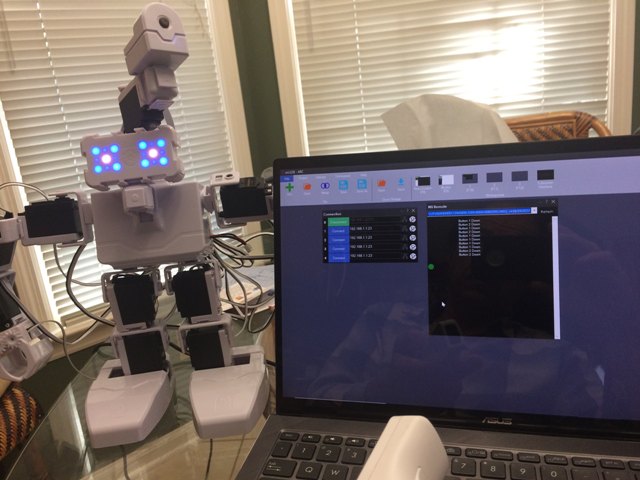

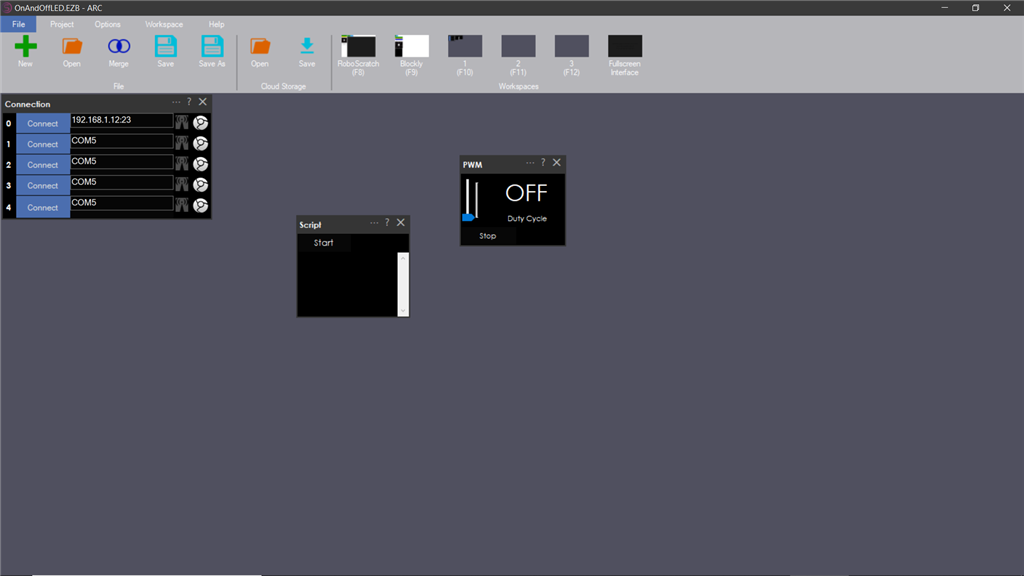


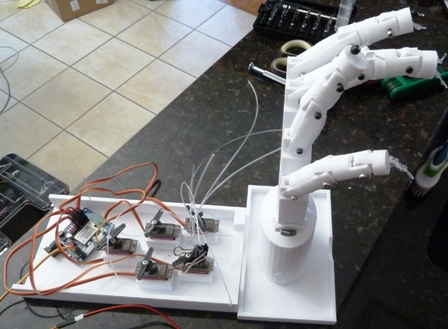



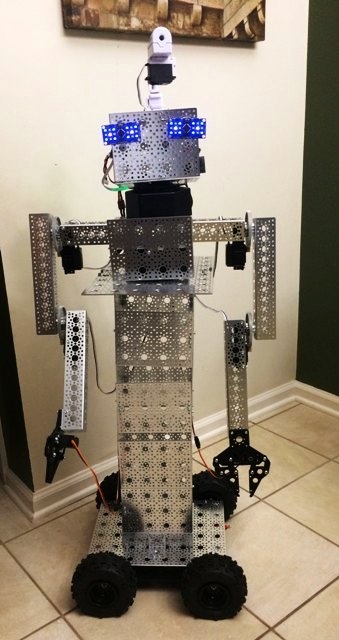
I am using ARC software with 2 iotinys controller, 2 EzB4 controllers - 3 EZ-ROBOT 1300 lithium batteries for the four Ez 360 HDD servos for the two arms, two 996R servos for the grippers, 2 DFRobot rotation hex bases for head movement and body movements. with 2 EZ-robot servos HDD, 2 RGB for the eyes - EZ-Robot HDD servo and moving camera - still need a mouth
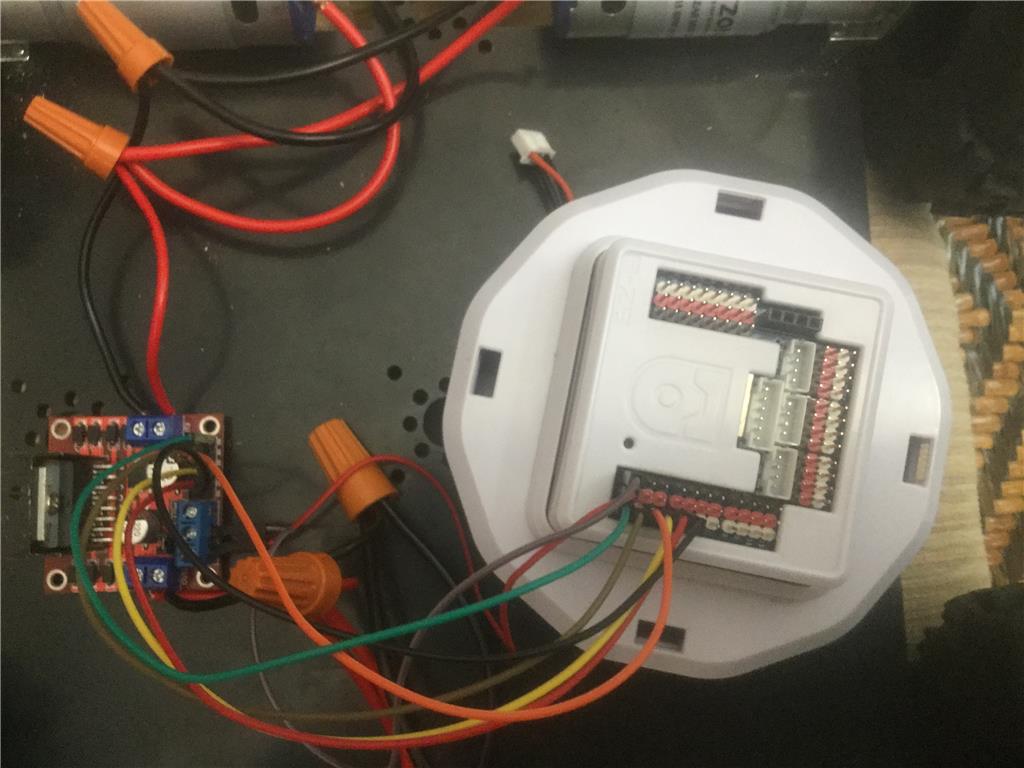
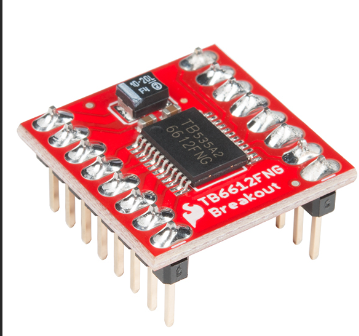
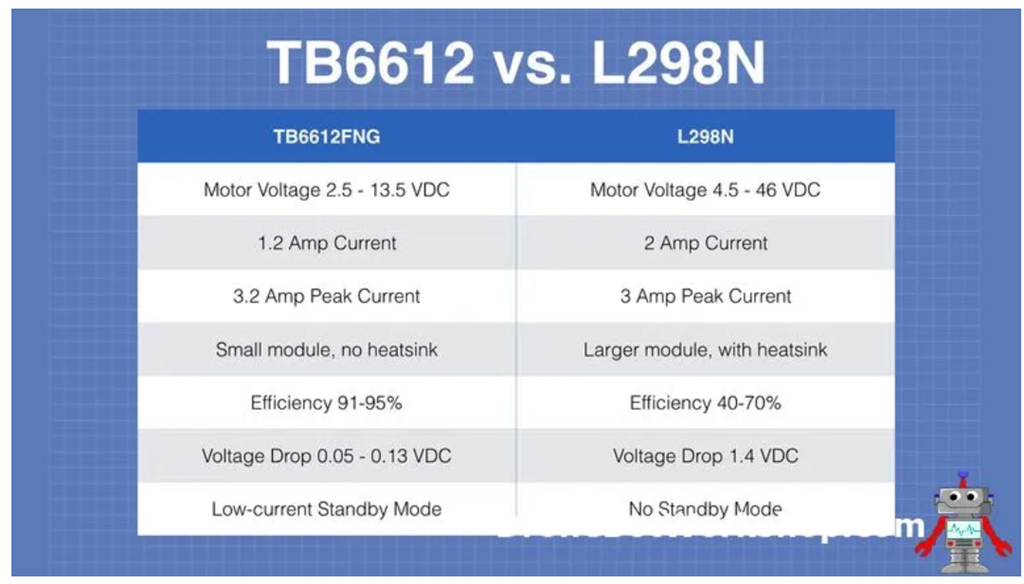
from servo City: 4 gearboxes , channels, parts, extensions, Prowler Robot Kit (wheels, 4 motors, h-bridge pwm motor controller
Here is a sample video
EzAng
By EzAng
— Last update
Discover more robots

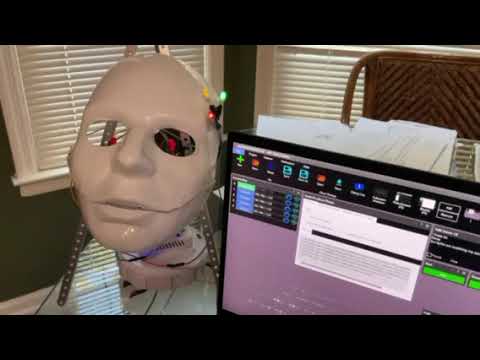
Robotdude's Lieutenant Commander Data
Data replica entertains ReStoring Data clients in Vancouver - head/arm SM-S8166M servos on EZB, face/motion tracking,...
Chiefavc's My Recent Projects After Getting My 3 Dev Kits
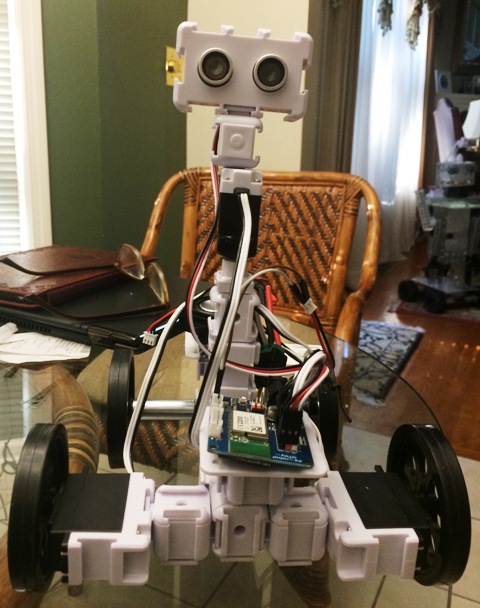
Robot photos showing multiple angles for build documentation, inspection, and troubleshooting.
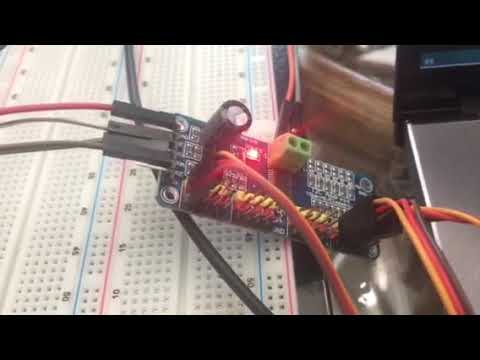
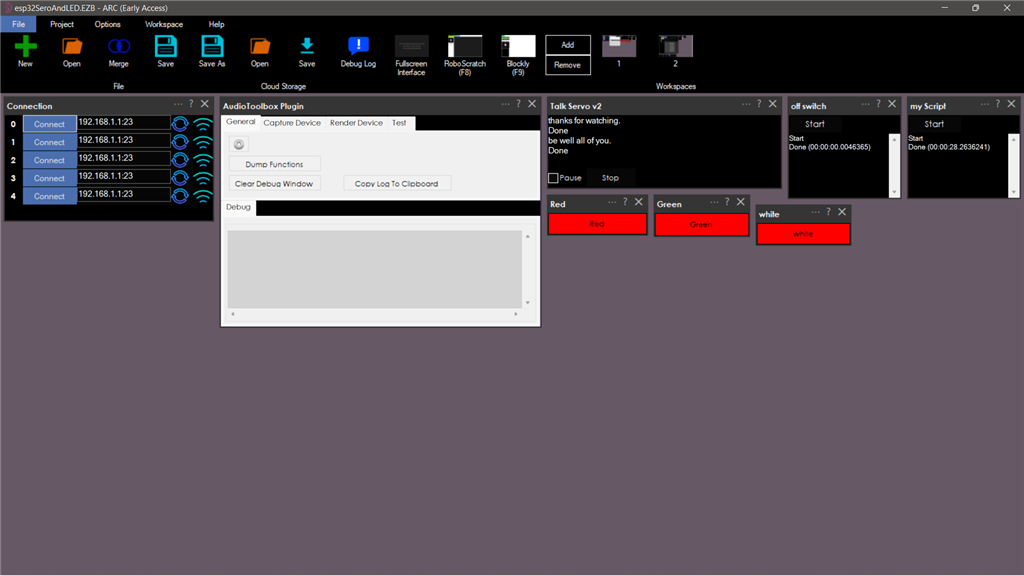
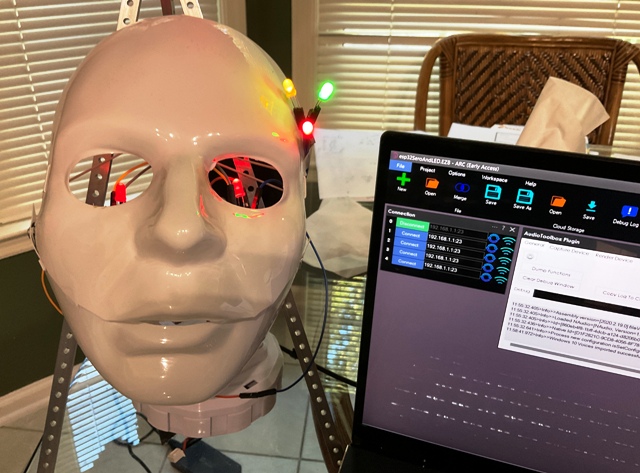
Ezang's ESP32 And ARC - Arduino And PCA 9685
ESP32 with PCA9685 in Synthiam ARC: control 3 servos now, 16 per board or chain for hundreds; shows servo results on ARC...

yes in 15 minites .all is tested. look for the name nomad or EDP EDP i post the stl here
ezang
here the stl's for the wrist.
wrist block2.stl
wrist block.stl
Ok thanks
Did not know you put the stls on here
EzAng
hi ezang
now you know too.xD
What is this? now you know too.xD??
look at the picture how to ad files to your topic.
ok I get it, thanks I knew that
hey ezang
i see you folowing the ava v2 robot . you could use the arms from a meccanoid robot to make ava v2 arms. and the chest .lot less printing .