
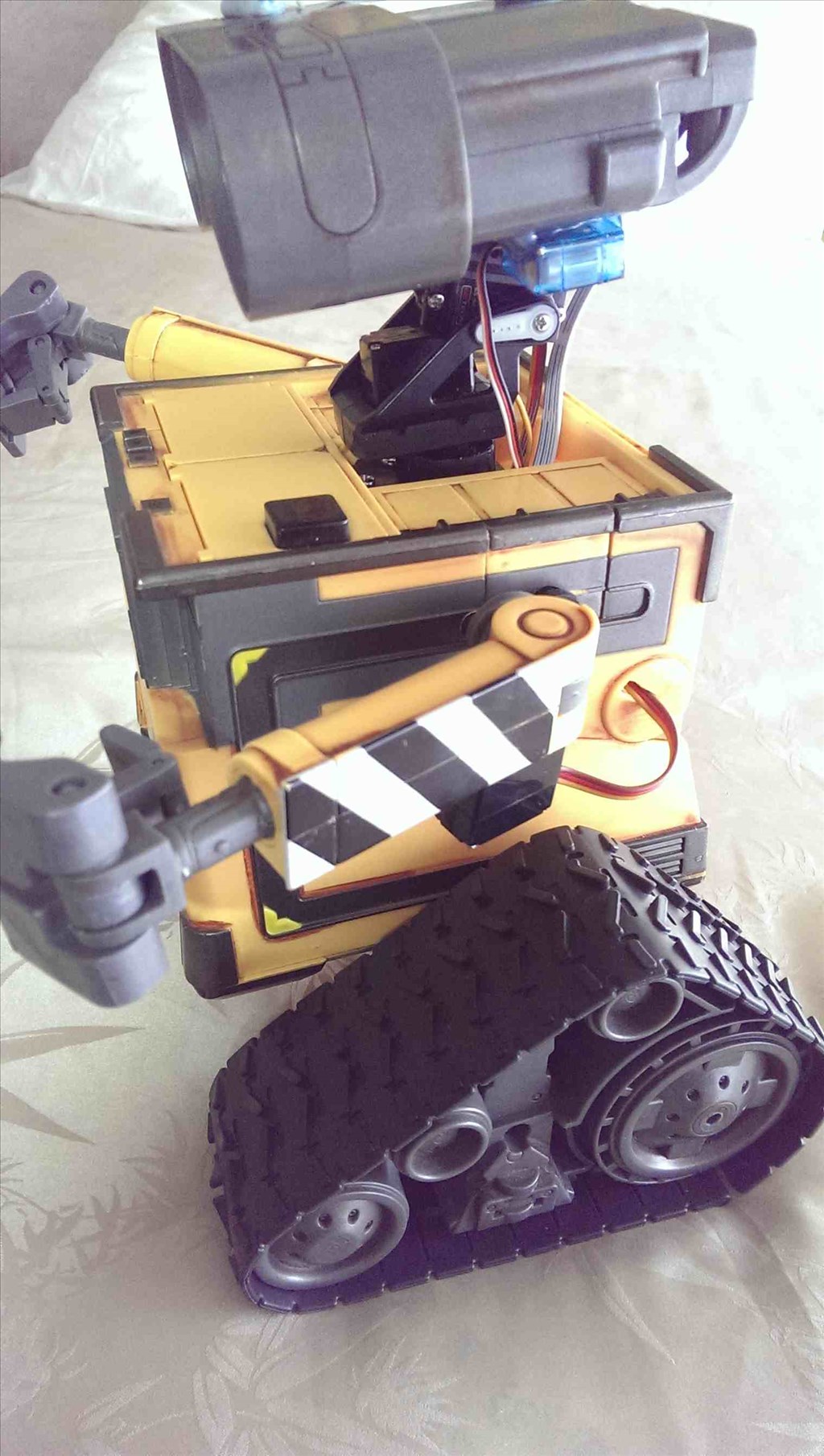
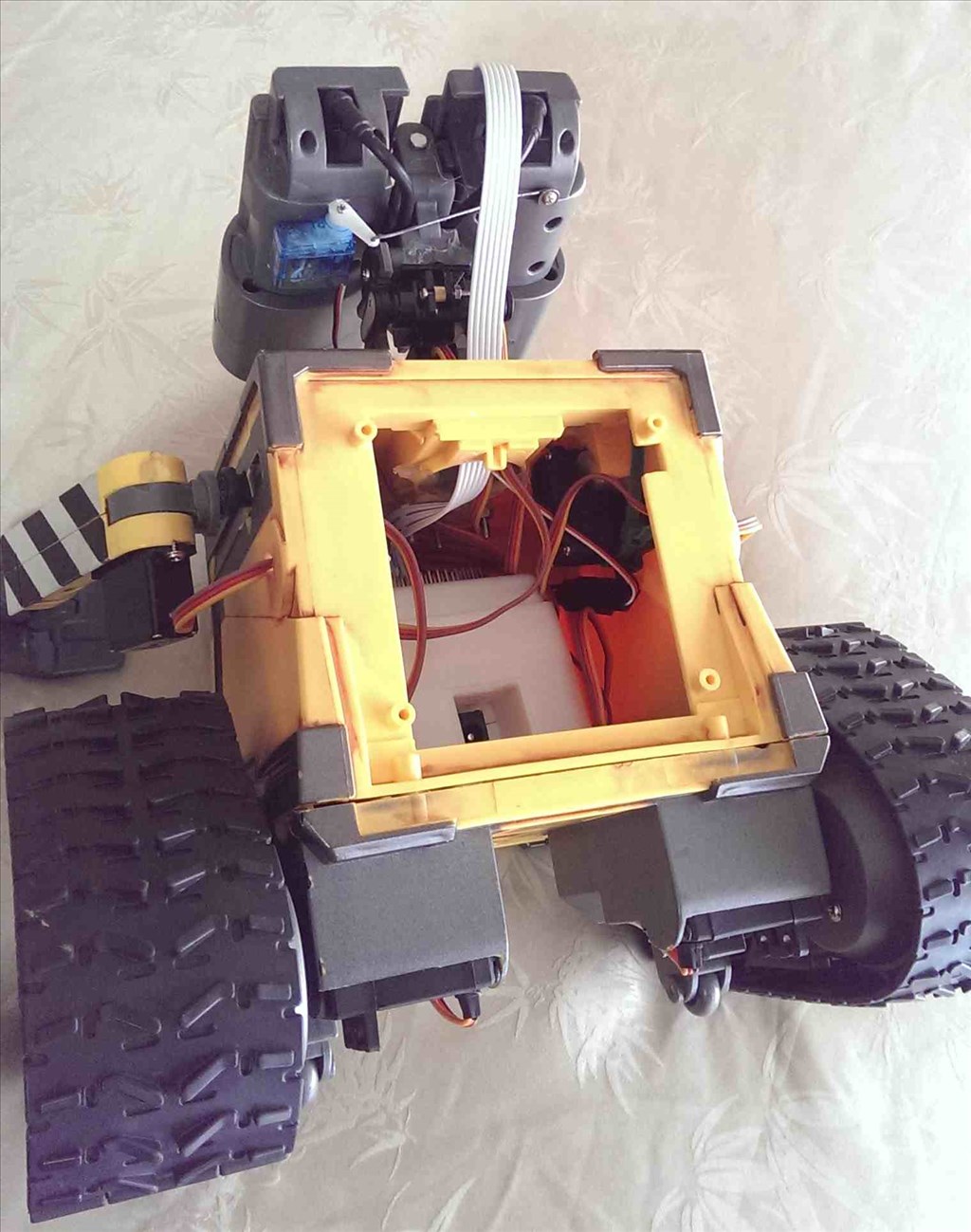
After receiving the Ez-B V4 development kit I was able to advance the build of my Wall-E with the insertion of the supplied continuous rotation servos and attachment of the the two tracks to the body. I'd spent a few months earlier gutting Wall-E and fitting servos for head rotation & tilt, eye twitch and two-way arm movement. I took a shortcut with the head movement by using a tilt/pan servo assembly that I got off ebay - http://www.ebay.com.au/itm/PTZ-Pan-Tilt-Camera-Platform-Anti-Vibration-Camera-Mount-RC-1-2G-2-4G-5-8G-FPV-/161176233437?pt=AU_Toys_Hobbies_Radio_Controlled_Vehicles&hash=item2586da25dd
Once I attached the tracks I could not wait any longer and connected all servos to the Ez-B and powered it up with a 4 x AA power pack to bring Wall-E to life!. I was greeted with the now very familiar "my battery is low" greeting but eventually got around that after connecting Ez Builder via WiFi.
I've been toying with Wall-E & the Ez-B for over a week now, with some success but also faced many frustrating problems. The main ones I think are being caused by power supply. The Ez-B goes into Birko mode for no reason, moving servos to extreme positions & even reversing them. I also get Unhandled Exceptions in the software with a reference to a non-existent D:/directory. This could be Windows 8? I will elaborate more after further testing and list somewhere.
My first aim is to replicate some DJ's Wall-E by studying and adapting scripts from the Legacy Wall-E robots. This will take some time as I'm new to Ez-Builder. I've had success with auto positioning, voice recognition, simple start up scripts and even some face tracking using the camera blue-tacked to the top of Wall-E's head! I've also been able to use the mobile Interface on my Android phone.
I'm having problems slowing down the servos. The worst are the continuous rotation servos supplied in the Development Kit. Their speed is not adjustable by the ARC software, so Wall-E spins his tracks and travels at virtual "break neck" speed making him pretty unmanageable. It's also almost impossible to smooth out the movement of Wall-E's other servos via the software, It's either full speed or very jerky movements.
There are quirks in the software which I would like to list somewhere without getting flamed by the Elite in this forum. One example is the Voice Type. All 3 voices installed in my version of windows get listed in the Speech Settings Panel but the Voice type can't be changed from 'Hazel" even if changed by Windows, ARC insists on using "Hazel"
The Ez-B speaker is very muted inside the Wall-E body. I might try to re-connect the original speaker, although Its ohm rating is not displayed on the case
So, overall, I'm pretty happy and satisfied with the Ez-B V4 and the ARC software. I'm surprised how far I've come in a week of tinkering. If I can do it, anyone can!


Other robots from Synthiam community
Jim's Project Armadeus

Gabbott's Quadruped Called Thumper

First, congrats on the build. I am doing a similar build.
What I have found is that the community is very helpful. If you post questions, they get answered by either those at Ez-Robot or by others who have faced similar issues. Please post any questions or issues that your are facing. Others will face the same issues and your questions will help others by providing answers.
As far as changing the voice, I am going to try to use this bit of script in my startup script.
I would be interested in knowing if it works for your build or if the same default voice is used. I know Rich is changing his voice for his Jarvis project. He might be able to provide a solution.
As far as your servo issue, someone else with the V4 would probably be much better at answering that.
The speaker muting issue, I know that the EZ-Robot kits use part of the case to amplify the sound. This is done by porting the speaker. There is a hole in the plastic bodies that is used to direct the sound from the speaker. I don't have one of these, but have seen a video that DJ talks about this. I am thinking about doing a similar thing in my build. If that doesn't work, I will be using the speaker that is in the wall-e. I am pretty sure it is an 8 ohm speaker and can be wired to the speaker connectors on the bottom of the EZ-B v4. This would require you to modify your design some by removing the case, wiring the speaker, and then providing a means for the wires from the external speaker to leave the EZ-B case. There may already be a hole but I dont think there is. I too will be facing this if the porting idea doesn't work out.
Tony1952, Nice robot. I have a stock Wall-E. I just tried and was able to change (slow) the speed of my grandsons robot continuous rotation servos by changing the values in the servo movement panel. It uses EZB3. I am not sure about changing it in script? You will get things adjusted. Steve S
@ d.cochran, thanks for your rapid responses! Unfortunately I'll be away from home for a few days so I won't be able to test your script right now. I am able to change the speed of speech with the control panel but not change to any of the other 2 voices installed in my Windows 8. They get listed in the ARC speech control panel but don't change when selected. I'll try your script when I get back. The Ez-B V4 plugs into a base which houses a fuse and std power socket. I think this base already mutes the speaker a bit and once inserted into Wall-E's body, most of the sound is lost, even when set at the "turbo 200" volume. The base also increases the overall size of the unit dramatically and it barely squeezes inside of my Wall-E which I thought had tons of room. I might do away with the base and wire in a micro deans connector via a fuse and switch in the base of Wall-E, so I can turn him off quickly when he gets out of control! I've literally caught him several times racing off the benchtop when his track servos are mysteriously triggered and the Ez-B is frozen. confused
Thanks @Steve S! When I first got my Wall-E off eBay and opened him up I was so impressed by the build quality that I became reluctant to convert him into a robot. I put him back together and left him intact for a couple of months
My servo Movement Panel does not have a drop-diwn box for speed control. I have tried using the separate speed control boxes with sliders, assigning one to each continuous servo, but servos don't move when set away from the max level. The manual does say that some continuous servos can't be adjusted. I suspect mine fall I to this category, I hope not though!
Great build I think you are the first person to build a robot with the v4 but If you want to make your wall e look like djs then take apart the eyes and put the camera inside the eyes
Great work so far Tony! There will be many new Wall-E's being built with the V4, which will bring alot of support from the various users. We are really excited to see what everyone comes up with
I didnt think about the power base. My plan was to do like you are contemplating and not use the power base. I have an ubec that is wired to the power switch. This will power the EZ-B. My servos and sensors are all 3.3 or 5V so I will be listening to the "low power" message at bootup and powering everything from 5v and wire the power into the ez-b itself instead of using the base.
Space seems much roomier in these until you start packing in the board and sensors. My goal is to totally populate the board with every sensor that I can put it it. Using it to demo some of the capabilities of the EZ-B to schools.
Tony1952, Try the box bot servo movement panel. You can find the file for box bot, it allows changes to the values. Steve S
Nice build. My Wall-E is in pieces at the moment waiting to be converted but then it's been like that for months now...
As for speech... I know I had issues with Windows 8 and voices in the fact that I needed to try different settings to get the voice to work. It was trial and error in the end and I just checked all combinations of Gender, Age and Emphasis, eventually I found the right combination which worked for the voice I was using. Try that, once you know what it needs to be on use the controlcommands to set it during it's init. sequence.
The servo speeds for the modified servo Movement Panel may give you an issue as you cannot change the speed of a modified servo drive train using this panel, you either have forward or reverse for each servo.
You could use a custom Movement Panel and script the controls though but it would require a fair amount of scripting to add speed control since in order to modify the speed of a modified servo (as far as I am aware, someone else may correct me though) you basically need to use the Servo() command and ask it to move to a specific servo position. Position 1 is full speed forward, 49 is stop and 100 is full reverse. So take that, and use the Servo(port,$speed) command to produce scripts which allow speed control. I don't have such a script written nor do I have the time to write one before next week but if you think logically it should be pretty easy to figure out.
That said, modified servos are slow so I personally wouldn't want speed control. If I did then I would change the servos to motors and use a H-Bridge.
Thanks Mohamed.r I intend to put the camera into Wall-E's eye one day. It's a very big exercise. For the moment the camera is blue-tacked to his head for testing and learning. I was a bit worried that the wide ribbon cable would obstruct head movement, but it's OK
Thanks Jason Z. It's still fairly quiet days in this forum but once the orders get sent our In July it will get BUSY! Exciting days ahead for all
Thanks for the suggestions Steve's and Rich! I'll give them a try when I get back home on Tuesday Queen's Birthday long weekend here - God save the Queen! (and thanks for the holiday!)
The modified servos on my Wall-E are much too fast and have too much torque. He actually spins his tracks on tackoff on a smooth surface like tiles and on carpet he flips and nearly falls in his back The speed of travel means I need a large room for testing.as it's not long before he crashes into a wall. Testing any routines is too dangerous on a desktop!
Rich is correct on the 1,(49),100 positions. I've done this and this is the method I'm going to use to make keyboard controls for my cameras pan and tilt. I put 49 in () because servos very. For some reason my mod servos stop at 52.
In this example, they are moving very slow. The closer to center the slower the servos will move.
Like Rich also said, there are better ways of doing what you want to do. I'm using this out of necessity. I came up with this because I have to make due with the parts I have/will have.
Hope it helps.
Wait, what? You get a day off for the Queen's birthday? The Queen of the country I live in? I don't get a day off!..
Hey Rich, we do (Canada) too... 24th of May is a long weekend here to Celebrate the Queens birthday....
Rich, that's because we love our/your queen so much! Although there are lots of "republicans" here that want to ditch her. I bet they don't go to work on Monday to demonstrate their belief! I'm sure you get random holidays for other things. You have to break up the working year somehow. It's much too long.
Here's an interesting fact I just googled - "The Queen celebrates two birthdays each year: her actual birthday on 21 April and her official birthday on a Saturday in June"
.....and the colonial peasants celebrate with a holiday at random times of the year!
Where I live I think we have the most public holidays in the world so far I can think of ten but they are many more
@Tony1952, Why would you be afraid of being flamed by the "elite" if you ask a question or find a problem with a function in ARC? Have you experienced that problem on this forum yet? Interesting that you would want to insult someone or "your perceived" group of people and then ask for help. Then you Flam Republicans. I guess your "Grumpy" nickname is well deserved.
Hey @Tony1952
The continuous rotation servos in the developers kit are quite fast, we're quite pleased that we were able to find some servos that could be 7.4V compatible and faster (higher rpm) than others on the market.
Generally 360 degree servos are quite slow and most people building robots discount them because of their speed, we wanted to change that paradigm.
The nice thing about these servos, specifically teamed up with ARC, is that you can adjust their speed to however slow you want by using the settings in the servo Movement panel:
Just change the forward and reverse values to somewhere closer to the stop value (89) and you can slow the servos down as much as you'd like. The closer the values are to the center value the slower the servos will move.
As @Jeremie pointed out, you can set the speed in the Movement Panel settings. What you can't do (at least without scripting) is change speed on the fly, but you can set a "permanent" speed. I had to do this with the continuous rotation servers from my V3 developers kit because one spun a little faster than the other, so my robot couldn't go in a straight line. Worked fine having one set to 180 and the other set to 3 instead of 1 (and vis/versa for reverse).
@Dave Schulpius I am not sure if you were joking, but just so you are aware, Republican means something different in Australia then it does in the USA. See: http://en.wikipedia.org/wiki/Republican_Party_of_Australia
Alan
@Dave based on your reaction you must consider yourself one of the "elite"? My fear of flaming is based on observations of this forum for the past 18 months After July when the Revolution robots are released, this forum will be inundated with newbies, making comments, criticism and asking lots of questions. Much patience and tolerance will be required by all.
FYI, outside of the USA, "republican" has different meanings. Here in Australia it's a group of people who are lobbying to make this country a Republic & ditch the British Monarchy.. Absolutely no relationship with the political party in the USA!
@Jeremie & @thetechguru, thanks very much for providing me with the facts on the continuous rotation servos. I'd be quite happy to be able to reduce the speed of the servos which I think would make my Wall-E more stable in his short tracks and more controllable in a confined space I'll give it a try when I get home and report back!
@Tony1952, I am so sorry to hear that you have felt like people were flaming each other on this forum. I agree that there will be a lot of new people on this forum and that a lot of these people will need a lot of help and you make a great point.
I work with people from all around the world. This has given me a slightly different perspective now than I had say 20 years ago. People from different parts of the world carry on conversations differently. Some cultures are very abrupt and to the point, while others are far more "caring" in the delivery of the message that they are trying to convey. This community is made up of people from all around the world with different skill sets in robotics. I have been following this forum for the past few months and have seen that the help that is provided by this community is extremely helpful and I really haven't seen or perceived that anyone is trying to make anyone else feel negative about themselves or anything like that,
Again, you do make a very valid point that there will be much younger and less skilled robot builders on this site very soon, and that they need to be handled a little differently with the responses that are given. Thank you for sharing your perspective.
@Tony1952... What flaming? I haven't seen any flaming on this site since I joined 11 months ago... Sorry, not seeing what your seeing...
@Grumpy, no I don't consider myself "Elite". I'm a nubile like a lot of other people here. I have skills I can share and so do you. I like to think we're here learning together and helping each other through this journey.
I just don't see why you need to criticize people that spend a lot of their free time helping others when they can be working on their own projects. They can just as soon let people like you and me flounder and give up. I also don't see why you need to bring social warfare onto this forum. I'm quite aware of how different political parties are perceived differently around the world. Calling out people on this forum that don't think like you (weather you think they are actively a member or not) may do nothing but keep you from getting the help you need. We're here to build robots and have fun.
We're here to build robots and have fun.
EDIT: After re-reading your first post I see you deleted your reference to the elite members of this forum. I hope you didn't get bullied into doing this. Your views are valid even if they are in an improper forum and so are mine. I'll gladly edit my comments also if it will help.
How about we just delete this whole thread! I'm sorry I dared to critise anything about this forum, this product and even the precious "republicans" of Australia
Richard R, here's a prime example. The cavalry always comes in to stomp on critics.
Really? OK, ya want to do it this way? I'm cool with that.
You're really a piece of work dude. First you inappropriately show your ignorance and bigotry in this short thread then you get unapologetically indigent and combative when you're confronted. Then you try to turn it around on me and play the victim. Finally in your last comment you try to dishonor the United States Cavalry. eyeroll
I don't need to be lectured by you to shut up and treat the tender young ones that are to arrive soon with kid gloves while you get to spit out your derogative thoughts. You're right though, in a few months this forum will be buzzing with new people looking for help. Hopefully distractions like this wont get in the way of lending a hand.
Dave, this thread was supposed to be a joyous occasion for me, proudly showing off my newly built Wall-E robot. I did not ask for any help but was offered many solutions by some very helpful people, which I appreciate. very much. A bit of harmless banter followed discussing the Queencs birthday holiday and our republican movement here. Then you come along misinterprating what I said and flame me with your antagonistic post, and then continue to do so with each new post. I am sorry to see you digging yourself into a deeper hole with each of your rants. The only way out for you now is the deletion of this whole thread which has turned pretty sour.
I sincerely apologize for those witnessing this fiasco but I will not be bullied
I mostly took offence to your slander of members of this forum that you consider to be elitists. I did not misrepresent that. If that was the case you would not have deleted your statement. I admit I was off a little about your meaning of a certain political party. However I still stand by my statement that a robot building forum is no place to air your political views and just causes these types of disagreements.
I don't agree that my speaking my mind about what I believe to be the truth and proper behavior is "digging me in deeper". I also will not be bullied into silence about such things and don't apologize for standing up to it. That I will never change. If your feeling joyousness includes slander then I will continue to speak the truth. If you follow your way of thinking then I have as much right on this forum to express my views of what I think is proper as you do getting a thrill out of dishing people.
Maybe we should all just read the data sheet.
Maybe we should all read the EZ-Robot Forum Etiquette!
I confess I read it for the first time 3 days ago. In the interest of community harmony I have zipped the lip since then, but i see Dave has less self control and continues his quest for oneupmanship elsewhere with his misspelling of the word "elite".
Can we call it quits, Dave?
:P Sure, I'll let you get in the last hit and last word. Hope your kick in my butt over my splleg weekness maces you feel better . I've made my point and am really bored over this whole thing. sleep
. I've made my point and am really bored over this whole thing. sleep
I truly hope your robot build is progressing nicely and you end up with a cool little robot you can be proud of. I know I'm truly impressed with what you've accomplished so far.
Also I hope our pissing match won't keep us from working with each other and lending a hand when needed. We seem like a couple of passionate alpha males that stand up in what we believe in. I can respect that.
Peace, Dave
PS, I think Australia is one of the coolest places on the planet and is home to some of the coolest people on earth. I spent a month there on an Adventure vacation a few years ago and it was one of the defining times of my life. You're a very lucky man to live in such a great nation filled with such great people.
Amen
Please see me PS above I added after you replied. It's important.
Thanks Dave
Some further progress on my Wall-E build:-
@d.cochran as reported on another thread I have connected the Ez-B directly to the original speaker that came with the Wall-E. Not sure if it is 8 Ohm but it sounds the same as a bigger 8 Ohm speaker I had lying around. It's a massive volume improvement on the small speaker built into the Ez-B, which I believe is muffled by the power base that comes with the Ez-B and even further muffled inside the Wall-E body. Unfortunately it also enhances the static noise I get when turning on the Ez-B Camera (also discussed elsewhere)
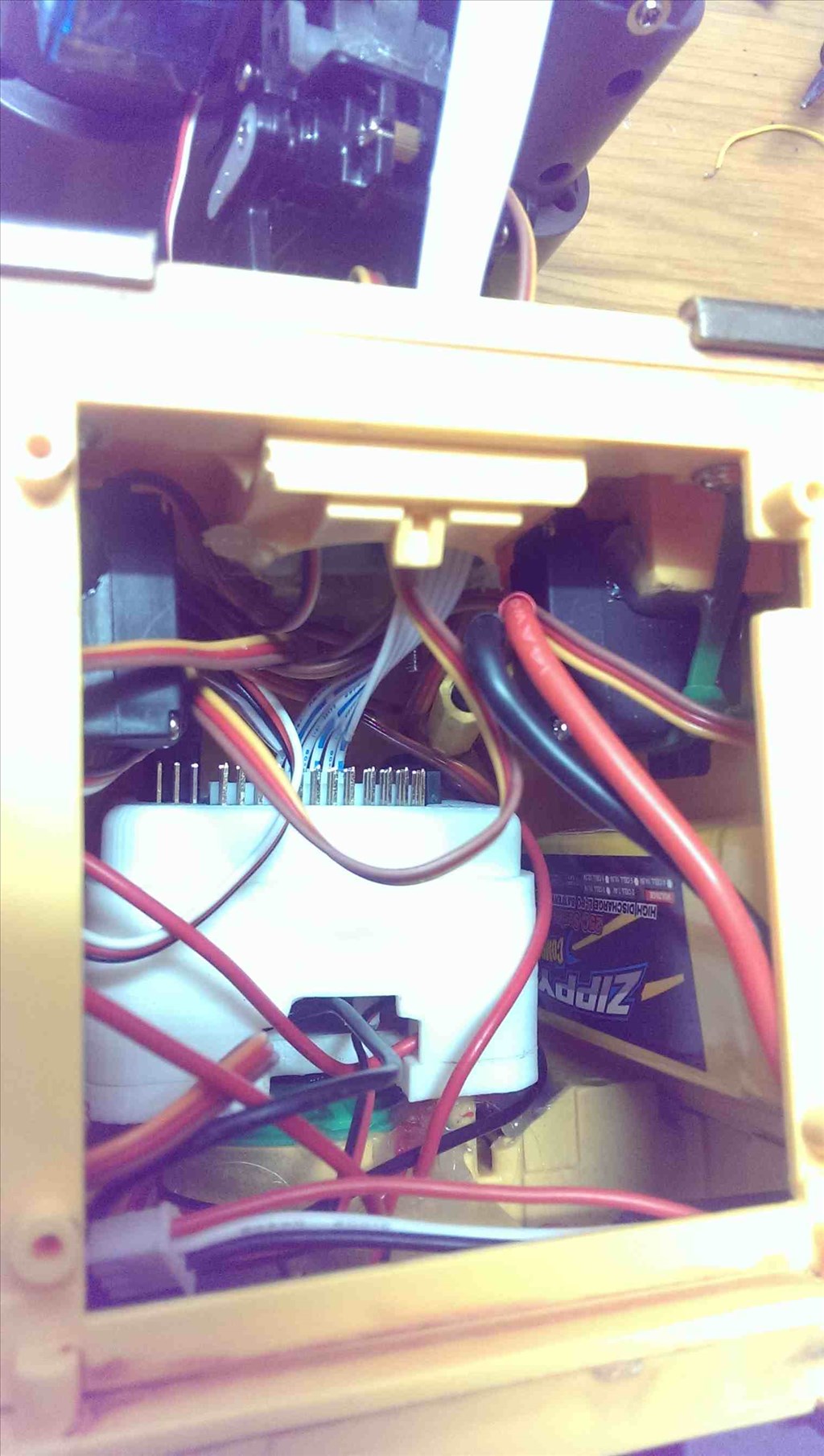
I also trimmed down the body of the Ez-B power base, shaving about 15mm from the height (see attached pic) and wired it to a switch in the base of Wall-E I have retained the base (with it's fuse) because I found the micro deans connector system a bit too "delicate" for Wall-E. After wiring the battery with a micro deans connector and plugging into the base of the Ez-B (which is a bad location for it to be), I found that slight movement would disturb the connection and reset the Ez-B. I concluded that the micro deans connector needs a firm, stable retention system, hence the power base that Ez-Robot supplies!
I might do away with the micro deans system by direct wiring like Dave Schulpius has done. This will give me more room inside Wall-E
@Jeremie, regarding trying to slow down the continuous servos installed in my Wall-E, I played around with the servo Movement Control panel for ages, getting inconsistent results and crazy directional movement for Wall-E. I eventually saw he was no longer tracking straight. Upon investigation (using some bluetak one each track) I found one of the tracks was moving faster than the other. There was also the dreaded grinding sound when I manually turned one of the tracks Sounds like the gears inside the servo are not engaging, ie. they're stuffed
Looks like Wall-E needs a sensor to stop the tracks turning when he falls so that he does not destroy his servos!
Are the continuous servos supplied by Ez-Robot in the Development kit metal or plastic geared? Could I swap the gears out of one of the 180 degree servos? Or should I just get some new ones?
Sounds like the gears inside the servo are not engaging, ie. they're stuffed
Looks like Wall-E needs a sensor to stop the tracks turning when he falls so that he does not destroy his servos!
Are the continuous servos supplied by Ez-Robot in the Development kit metal or plastic geared? Could I swap the gears out of one of the 180 degree servos? Or should I just get some new ones?
Hi @Tony1952
I have used the Modified servo Movement Panel several times to trim down the speed of the servos. Remember that since your servos are spinning opposite directions in order to move your robot forward you will need a minimum value of lets say 70 on one side and a max value of 110 on the other.
If your robot is not tracking straight you can do one of two things:
Adjust the values in the Movement Panel to have different offset values (ie: Max 95 (89 +6) on one side and min 75 (89 - 14) on the other) away from the center (stop) value (89).
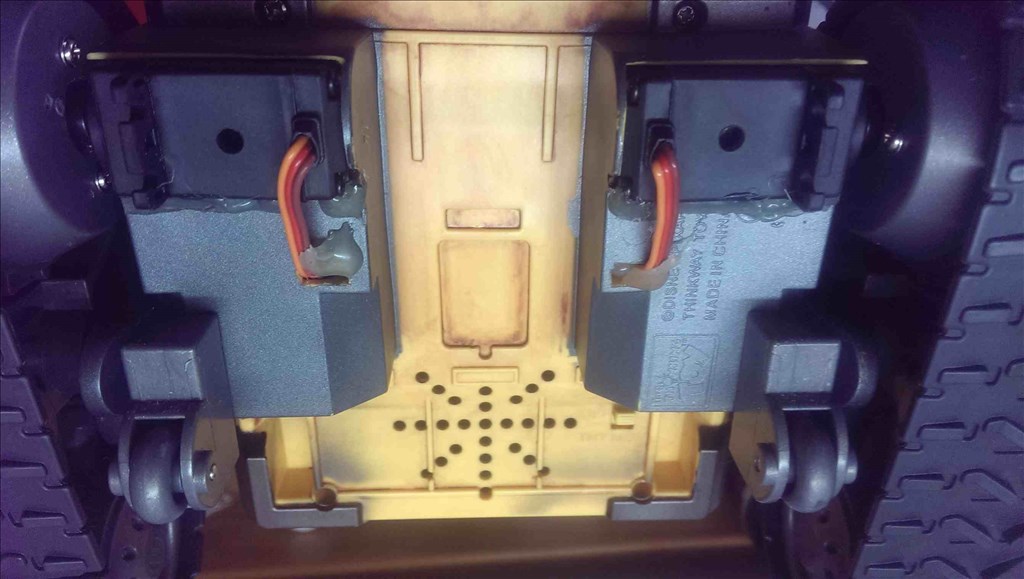
Use a phillips screwdriver to manually fine adjust one of the potentiometers on a servo (which is accessible from the exterior of the servo where you can see a small hole on the side of the servo)
The continuous rotation servos in the development kit are plastic geared and you may be able to find some suitable replacements from other servos (or at a hobby shop) but I can't give you any guarantees.
In addition to using (what Jeremie said) the modified servo panel to match servo speeds, if your CR servo is indeed "stuffed" as you say... can't you just grab another (or two) from eBay and replace it?
@Jeremie thanks very much for the detailed tips on the Modified servo Movement Panel and also the individual servo adjustment on the servos. I saw those holes in the bottom of the servos and wondered what they were for! I suspected some form of adjustment but was reluctant to touch What I find odd about the "stuffed" servo is that the attached track can almost be turned freely by hand (ie not feel attached to the servo) but when powered the servo can still turn the track at about 75% the speed of the other one. This of course does not allow Wall-E to track straight and also any adjustment to the Movement Panel causes odd results
@Richard R please understand that I come from an era when you tried to fix things rather than discard and buy new. Would you believe I still straighten and keep bent nails just like my grandfather taught me when i "assisted" him in his garage. That's why I was wondering if I could exchange any damaged gears with those another servo. Once I remove the ton of hot glue holding the servo in place, I open it up and check out what happened. Having said that, I have already ordered two high torque metal geared replacements, which hopefully will do the job
After 2 AM! are you two working night shifts or suffering from insomnia?!
I wish I had known about the adjustment screw before I glued down my servos with no room to access the bottom. Oh well, adjuring the max/min settings let me equalize them pretry well.
I may be rebuilding this Bot when I get my v4 boards anyway.
Alan
@thetechguru I first noticed the holes when gluing the servos in from the bottom! It's fortunate that I had positioned the servos this way, otherwise they would not have been accessible.
@Tony1952,
I know your having problems with your sound. I posted this in another thread but I thought I'd add it to this thread also incase you miss it:
<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<
I've been thinking about your sound problem and have a few ideas to throw your way.
First, I noticed a few things when I was struggling with the poor sound issue I was having when first setting up an external amp and speakers on my new V4. Sound quality varied greatly between different sound files and also types of files. I think this was because some of my files were not sampled lower than others. Also in my case I found that my .WAV files played much better than .MP3 files. Try to find higher quality files and see how they sound. Perhaps you can resample your sound files using a sound editor like Sound Forge (at $200 it costs a lot but there are other free programs that will do the same thing. Sound Forge
Second; If that won't fix it maybe you can add a small external amp and use the breakout hole before V4's built in amp and an external speaker. I did did a tutorial on how to do this here:
Breaking Out The Sound From The V4 Ezb
If you don't use the power base, remove the little deans connector and solder wire in for a pigtail power connector you will have lots of extra room in your bot. If you're concerned about a fuse you can use a inline fuse in the positive wire. Here are a few examples of hardware you could use:
In-line AGC Fuse Holder
Mini 5V Audio Ampli Digital Amplifier Board
Hope this solves your problems. Let us know.
@Tony1952- I too am a use and re-use kind of guy. People are familiar with DIY but not many are aware of DYK, as in "Do You Know, what that's going to cost?" I commend you good sir.
I once ruined an HD servo and the one I ordered to replace it was defective. They told me to just keep it and refunded my money. I then used it's good parts to fix the servo I ruined. So, I got to fix it for free. So, you should be able to get parts for your servo and fix it.
So, you should be able to get parts for your servo and fix it. It was actually really easy. I hope this helps you out some.
It was actually really easy. I hope this helps you out some.
@Antron007 thank you for your commendation and encouragement! I commend you too mate! I will have a go at fixing that servo, or keep it for repair of others
I prefer to fix things rather than throw away. If it can't be fixed it is kept for spare parts for future repairs, unless it's bulky and the wife insists on disposal! I'm sure most people in this forum keep screws, connectors, wires and all sorts of oddities for future use - I've seen it in the background in their videos!
@Dave Schulpius, many thanks for your ideas regarding my sound problems and the Amazon links. I have also read through the thread "Breaking Out The Sound From The V4 Ezb" and watched the video tutorial. I did see the original tutorial and find the sound improvement significant (using the ext Amp)
I'll convert all my Wall-E sounds to WAV to check out the difference Also I'll remove the power base, get the In-line AGC Fuse Holder and direct-wire to the Ez-B board. This will give me the extra room I need inside Wall-E. By the way, the last time I saw one of those in-line fuse holders was when I installed a radio into my first car many decades ago! I did not know they (and the glass tube fuses) still existed till I checked your Amazon link. I also didn't know those tiny amps existed! I've ordered one off ebay as postage from Amazon is highway robbery, but it will take a month to get here.
At this early stage I'm really not that unhappy with the sound output via the external speaker that I installed in Wall-E. I find that the sliding volume control on the Soundboard V4 panel gets distortion at either end, otherwise its good in mid range.
My key issue is the static sound I get when I start the camera. It's always there when the camera is on and gets very annoying. I tell family it's Wall-E thinking. I've tried putting foil shield around the cable, moving the camera, etc etc but nothing stops it except the camera stop button. I will try the external amp to see if that is the cure.
Do you have a V4 camera? Do you get any static sounds when the camera is on? I've attached a poorly made video (with my phone) demonstrating the sound using Wall-E's original inbuilt speaker and using WAV files with the Soundboard set at mid vol. Not bad
for a Wall-E in my opinion and significantly better than the Ez-B inbuilt speaker muffled by the base and by being inside Wall-E's body. You'll see in the video my inability to give Wall-E a male voice. Also at the end is the static sound I get from the camera
Humm, Yes, I can hear the static sound in your vid. I sounds like electronic noise. I do have a V4 camera but haven't even hooked it up yet. I'm going to have to give it a try now to see I can hear it in my setup.
I've found that noise like this usually travels through the ground connections. Make sure you don't have any ground loops built into your setup. They are kinda hard to find and understand but simply put you may have two devices at different ground potential fighting over one ground connection. Here's a Youtube vid that explains it:
There are also many internet articles on this problem. Here's a good one to read:
www.epanorama.net/documents/groundloop/
The easiest way I've found to eliminate this problem is to run two different power supplies and keep the noisy electronics on a different power supply then the sound amp. However in the case of a small robot that may be hard to do because of size constraints.
@Dave Schulpius, thanks for the video and the web link which I have watched/read. Some is over my head but I do get the drift and it explains what I have heard and experienced in audio and PA systems over many years. I would not know where to start looking! My setup is very basic - 9 servos & a camera connected to the Ez-B, powered by a 7.4v LiPo battery. I've used a different 7.4v LiPo battery from the one supplied by Ez-Robot. I've unplugged all the servos. I've even put back the original micro speaker. All with no improvement .
The Ez-B by itself is dead quiet until you push the volume to the max with scripting - SetVolume(200). I did that before connecting to the external speaker. It was the only way I could hear the std speaker from inside Wall-E (with his back door open). Every sound got distorted and there was crackling at idle.
The culprit definitely is the camera. When started via the camera console the sound is what you heard and gets worse as the volume is turned up.
The only other thing I am capable of doing is check the camera cable by trying to get another one from somewhere
I'd be interested to know if you hear anything from your camera
.
The Ez-B by itself is dead quiet until you push the volume to the max with scripting - SetVolume(200). I did that before connecting to the external speaker. It was the only way I could hear the std speaker from inside Wall-E (with his back door open). Every sound got distorted and there was crackling at idle.
The culprit definitely is the camera. When started via the camera console the sound is what you heard and gets worse as the volume is turned up.
The only other thing I am capable of doing is check the camera cable by trying to get another one from somewhere
I'd be interested to know if you hear anything from your camera
Tony, are those mini servos in his arms? I mean for side to side movement? I really like that. Helps give wall-e a more animated look with more degrees of freedom in his arms
@Tony, Sounds to me like the most likely source of the sound problem is on the EZB or the camera. If everything sounds right until the camera is plugged in then my money is on the camera board having a problem. Have you contacted EZ Robot through their support link? Too bad you don't have another camera to swap out and see if it's the problem.
I'll have a little extra time this weekend so I'll fire up my camera and try it on each of my three EZB V4s to see if I can reproduce this issue.
One last suggestion; Make sure you have the camera's cord fully plugged in. It's may not make any difference but it's worth a try.
Tony, I was thinking about the fuseholder I pointed you to. Those are usually pretty big and I know you're short on space. Here's a much smaller option. Larger ones are also available if you can't find the right size fuses.
www.amazon.com/gp/aw/d/B000COA31K?pc_redir=1403770183&robot_redir=1
@Richard R I used GO-TECK GS-9025MG servos in the arms (for horizontal movement) and in the neck for two-way movement. They are high torque for their size and work well in these functions. The arms took me a while to work out how to do as the arms would not come apart after removing the 2 screws. The halves move apart but are held together at the "sleeves". I did not get the answer in this forum. Eventually, after trying many times I used a tiny bit of extra force and they broke away cleanly. Thew screw back together again and you would not know they had been pulled apart!
@Dave Schulpius thanks for your help with my camera issue! I will have another camera to test "at the end of July", hopefully! I have carefully plugged and unplugged & swapped ends on the camera cable several times with no change
Thanks also for the link to those tiny space saving fuses. I'll try to source them locally. Even on ebay they are $10 for a 5 pack plus $50 for postage!
When you say E-Z Robot support link, is that using the "contact us" link on the bottom of this page? I have not contacted them using that as the pull down subject list does not include "problems" as one of the allowable Subjects. On that page they refer you to "Video Tutorials or join our friendly Community Forum". I have only used this forum but I am reluctant to do so as I have had a few other issues with the development kit received and software with things not working as expected, continuous Unhandled Exceptions and messages of ARC having to stop in both Win 7 & 8. Perhaps the software issues have been brought on by me because I'm a stupid newbie? Perhaps it's because some of the software is still Beta version? Whatever the case it's all a bit frustrating for me!
For the software problems, the forum is a good way to report them. Beat to open a new thread, describe what you were doing when it happened, and either attach your project or make it public in the cloud. DJ usually responds and fixes that kind of thing, and since it would impact everyone, reporting it publicly is best.
For the camera static issue, since no one else (of tje first hundred shipped) has reported similar, it seems you may have a bad board or camera. A cold solder joint could be causing some interference. Using the Contact Us link and asking for an exchange is probably the best course of action, although starting a separate thread on that to make sure there is not a widespread problem won't hurt either.
Although EZ-Robot staff try to read every thread, having the complaints burried several pages in a project thread rather than front and center in a bug report or help request may cause them ti be missed.
Just my two cents....
Alan
Sorry @Tony
I just hadn't had a chance to reply to this thread but I've been following it. Unfortunately, I don't think there is much we can do about the static that the camera seems to cause as it is likely internal to the EZ-B design.
With the speaker that comes with the EZ-B the static is barely noticeable but since you installed a larger speaker it amplifies that noise a little more.
I would suggest to try keeping your volume slider below 100 on the sound board control to make sure there isn't any added distortion.
Try what @Dave has suggested (breakout the audio input of the onboard amplifier to an external audio amp. board and then run it to your speaker)
I can suggest a couple hobby audio amp boards that run at 3.3V that I have used but I'm sure members of this forum will have some great suggestions to add.
As for the software issues @Techguru's advice would be the best. Find where the errors most commonly happen, document them (with screenshots), and post to the forum, that way it gives everyone a chance to try and solve it
@Tony, That's crazy expensive to ship! Have you checked your local Hardware or building supply store?
@Tony.... LOL... Had the same trouble with the arms as you did even before reading your post... Anyway... thanks for the tip, bought me some of those GS-9025MG servos....
Cheers Richard
I just got the V4 kit and the camera is quite noisy as well.
Hi @jstanley,
What kind of noise are you seeing? Is it static across the entire camera frame, or is it a grey bar at the bottom every once and a while?
What kind of lighting conditions are you in?
Could you post a screenshot if you don't mind? Thanks!
Oops maybe I misunderstood, do you mean that the camera adds noise to the speaker?
Yes @Jeremie, I think @jstanley means noise to the speaker (as I mentioned in my post #47 and attached video)
I've been away travelling for a few months but I'm back now, catching up with what's happened/happening on Ez-Robot
I see that noise from the inbuilt amplifier of the Ex-b V4 is now a known an accepted occurance on this forum and the "fix" is fitting an external Amp (as pioneered by Dave S!). I'll eventually get around to doing that
Besides the @jstanley comment I note there is no other mention of the speaker noise being accentuated by turning on the camera. I wonder what others are experiencing now that more Revolution robots have been shipped and built?
I have a couple EZB V4's and have 5 more on the way. The couple that I have don't have that issue. I will see if any of the coming 5 have the issue and post. I haven't seen any posts about it as if it were a prevalent issue.
it may be something as simple as adjusting how your wiring is in your robot, using a ferrite bead, or breaking out your power differently. I have one in a wall-E that is not much different than your build other than how power is ran. just a thought.
Thanks for your feedback @d.cochran. Good to see that you do not have this issue!
I did fiddle with the power extensively including different batteries, connectors and mains power supplies, use of ferrite rings, shielding of power and camer wiring, etc, all with no difference, inside or outside the Wall-E. There is definitley some feedback coming from the camere when switched on.
I have another Ezb-V4 and camera on order. That might help narrow it down? I did get one of the "first 100" hand built development kits