


























It's just a concept right now but I wanted others to see that the scale doesnt quite match. Right now its just stacked on there and neck is a little too long.
By Troy
— Last update
Discover more robots
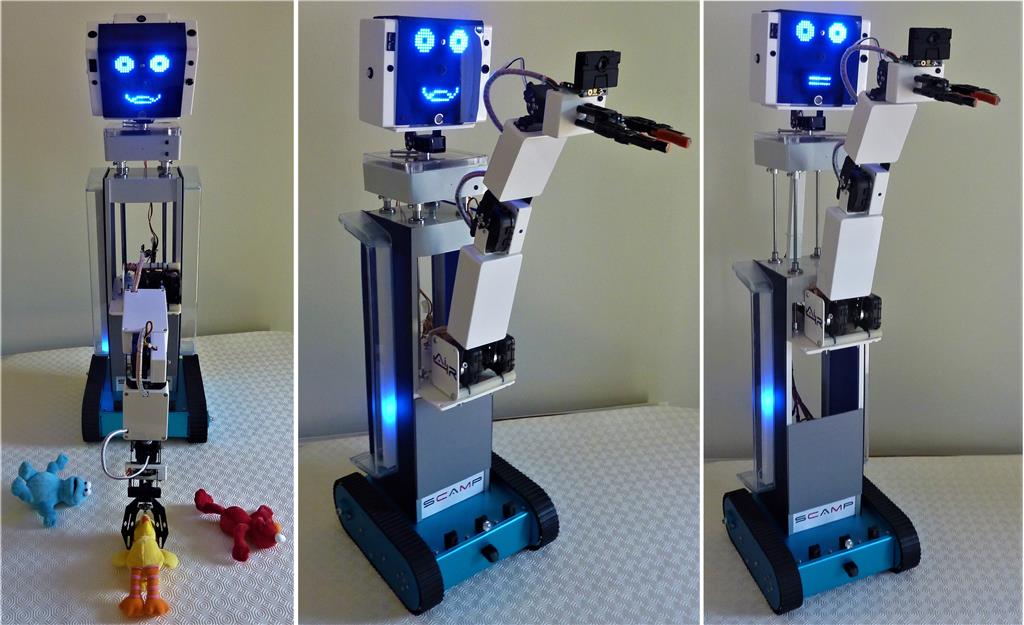
Toymaker's The Latest ALTAIR Robot - SCAMP
SCAMP Assist-Drone: low-cost telepresence robot for elderly and disabled with telescopic reach, object fetching, Alexa,...

Johnnypipey's Bb8 On The Cheap Project
Recreate BB8 with EZRobotics on a shoestring-beginner DIY build, early progress, lowcost parts and handson...

Cardboardhacker's Technopro's Live Wall-E Build (Saturday,...
Live Wall-E robot build Saturday - tune in for live assembly updates and progress.

Oh so they arent solenoids and can vary the throw? I wonder how much current thats gonna draw. The speed of castanets was a joke.
Well I know it was an exaggeration. I just remembered that they are cheap , quick and strong.
Josh, you know what, after testing the speed without the board on 7.5 and 12v it seems a bit slow. So Im thinking of using your idea if it fits. Maybe one with 7.2 and the other with the actuated for gesturing. I was never really intending to do more than gesture anyways. Good find Josh!
I'm 1000 percent sure it can fit in the upper arm which is hollow and run a flex cable to the claw since its a simple push pull , fitting in.the forearm could work with cutting the actuators down some.
mostly very high current,like all door locks i replace a few on cars and forgot about them.not same one but others boy did i hate working on cars,not as enjoying at working on electronics,plus added work work travel
They use mabuchi 280 motor , it varies from one actuator to another.
thats about a 3 amp motor
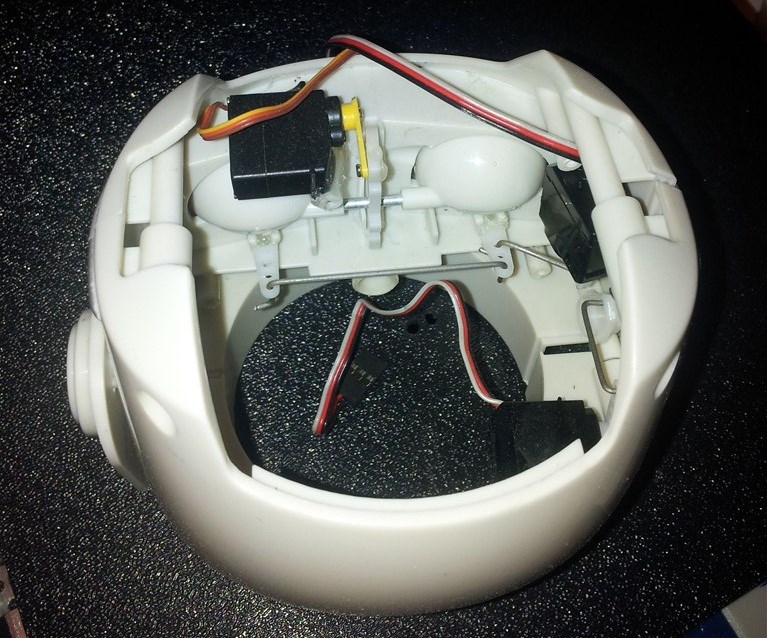
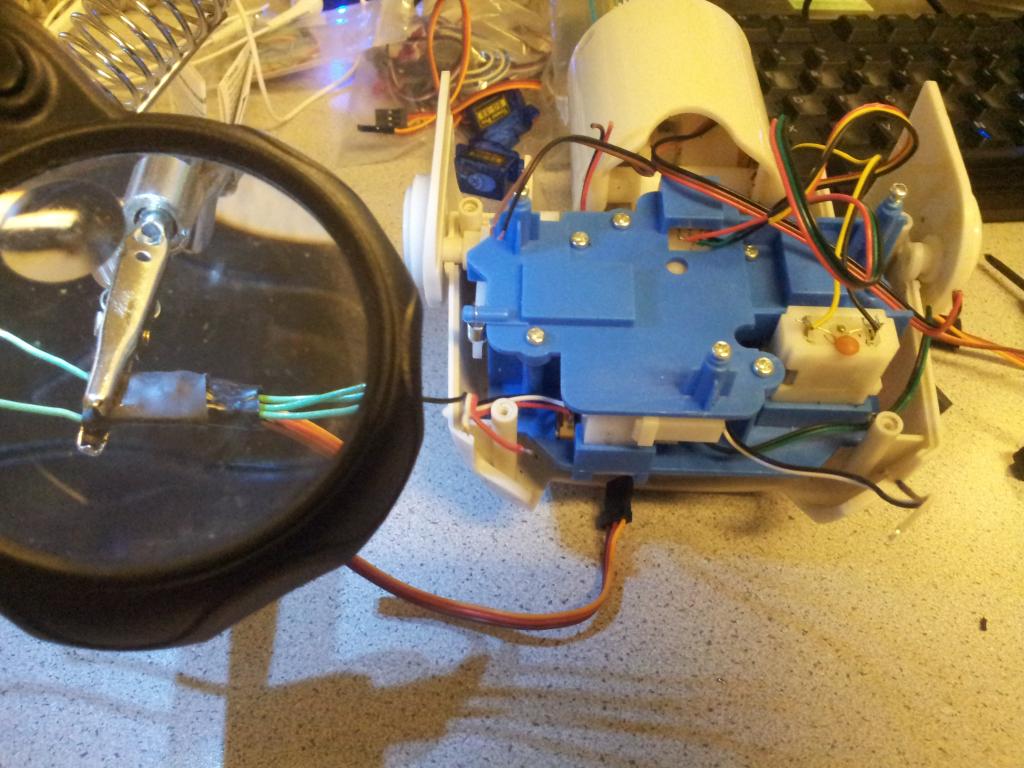
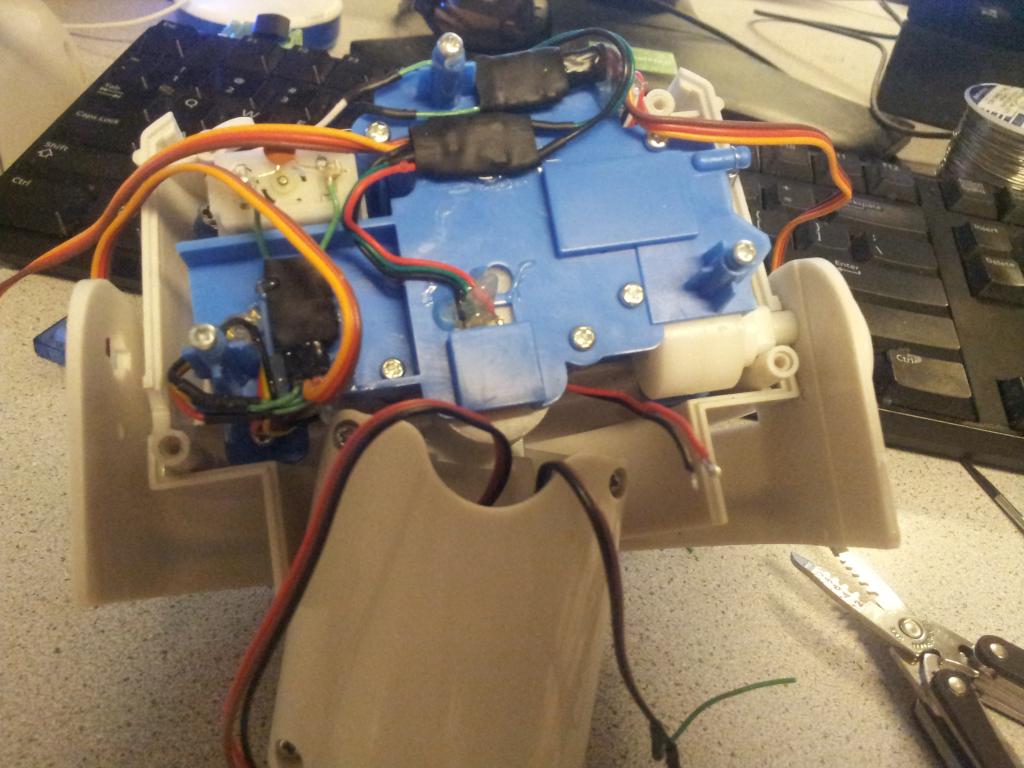
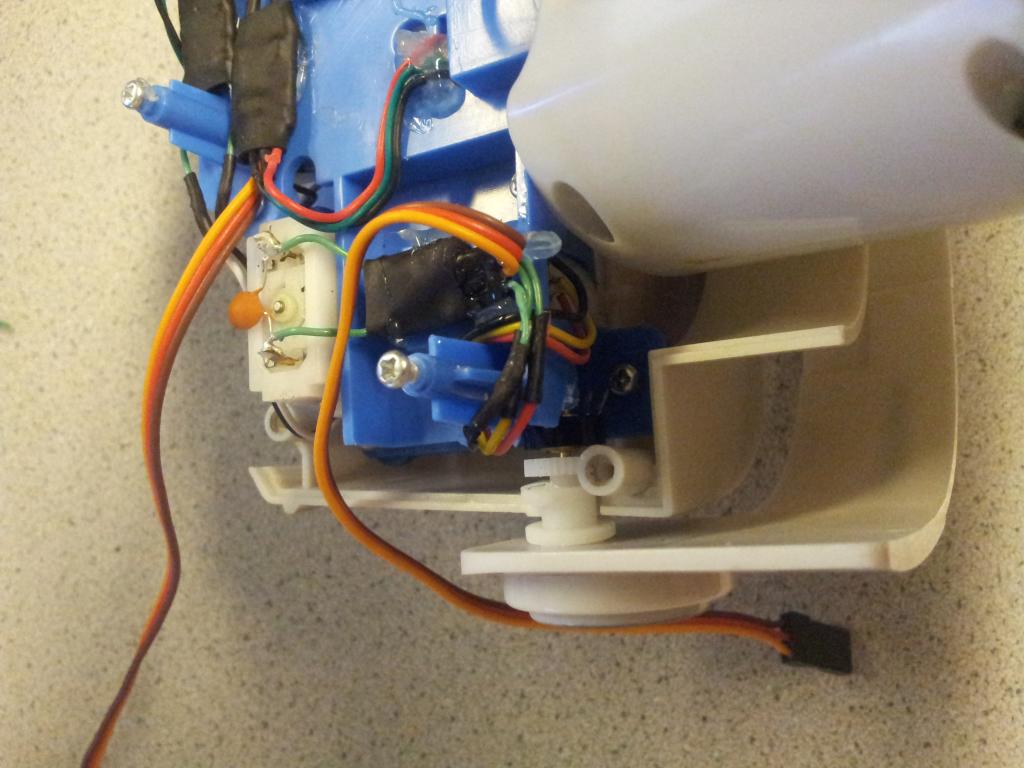
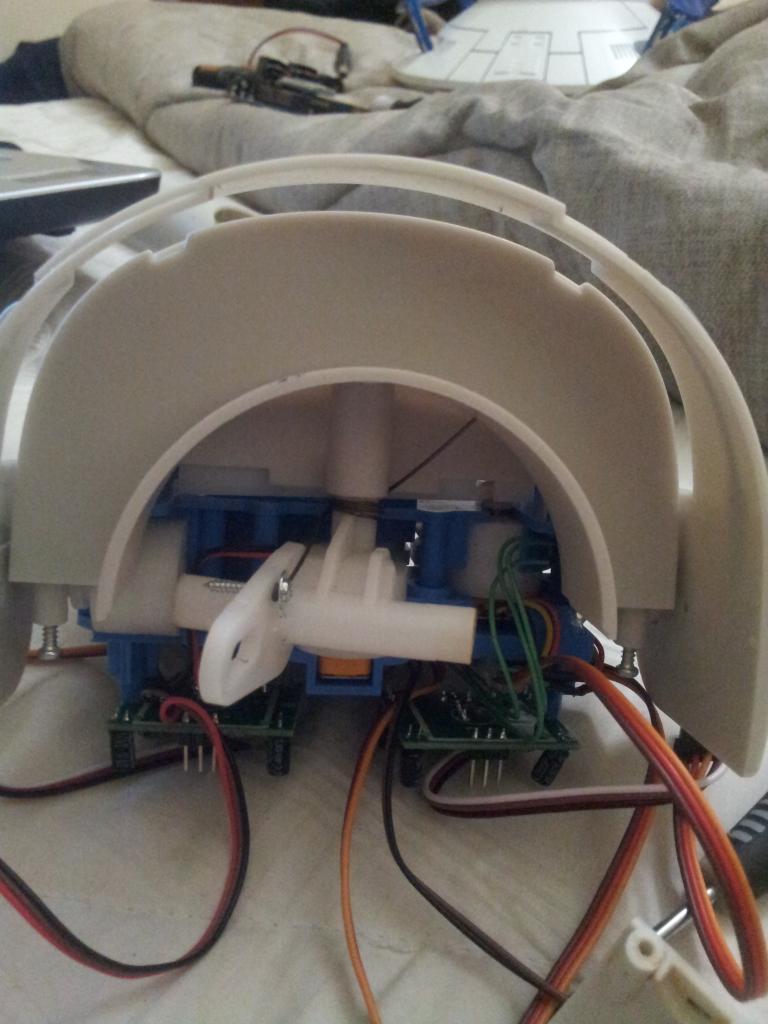
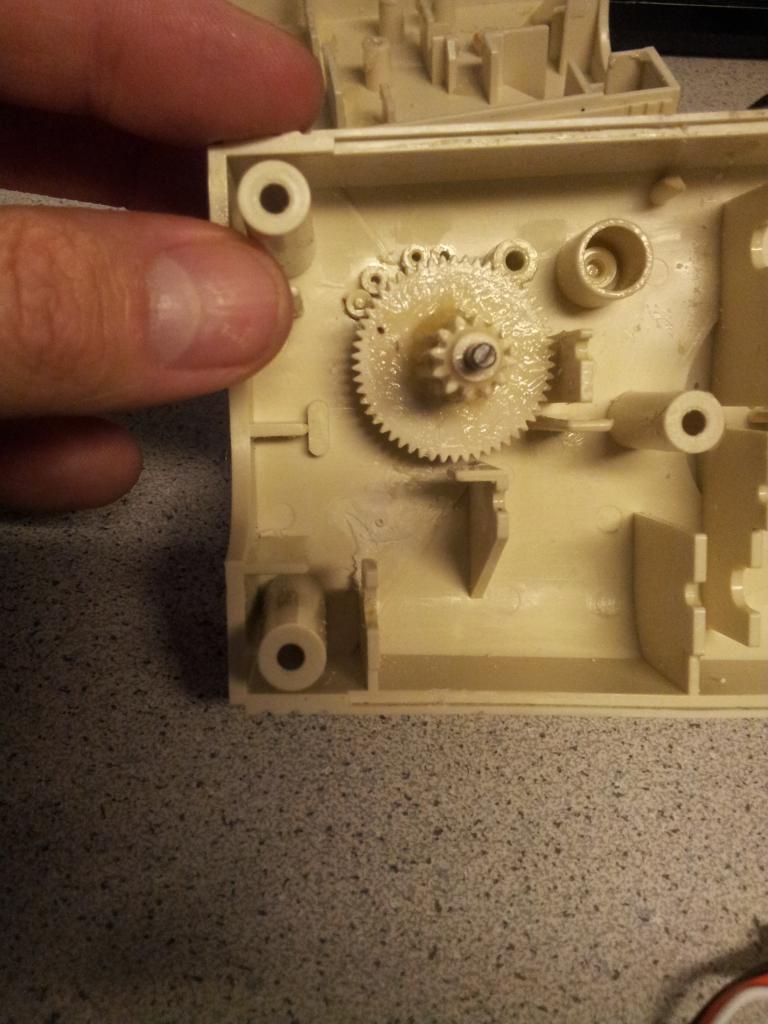
I found a solution for my bot's head wobble without using new servos and pushrods. After I got the parts in to try the pushrods it quickly because apparent that I would have to modify quite a bit and the neck would be much thicker with servos inside. I re-examined the problem and thought of putting tension on the neck to reduce the slop or slack that caused the servos to overcorrect when trying to go from one position to another. I looked at what I had on hand and saw that the springs that hold the tray door closed would work great. They even fit around the axle too. I tested it and it worked. Take a look.
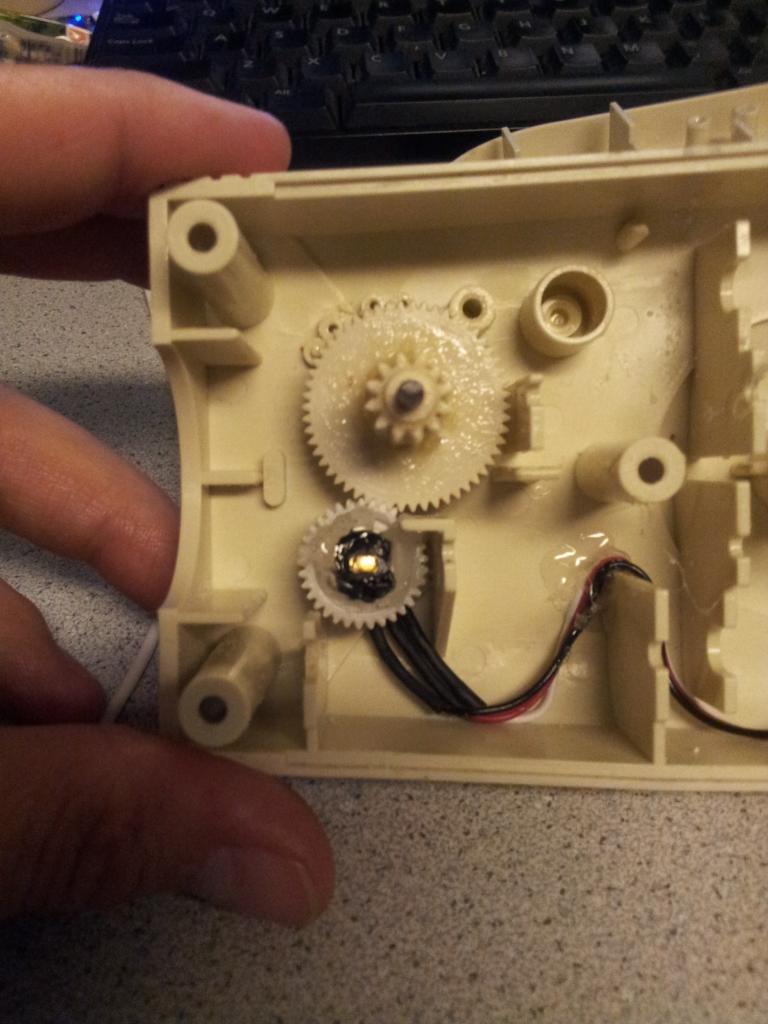
Oh yeah the two little boards are from the motion sensors. I desoldered the sensor from the board and put them on his ears and the boards fit within the head. I haven't tested them yet.
I'm now working on putting my claw mod together with my modded elbow. The other video was on the other arm's claw.