
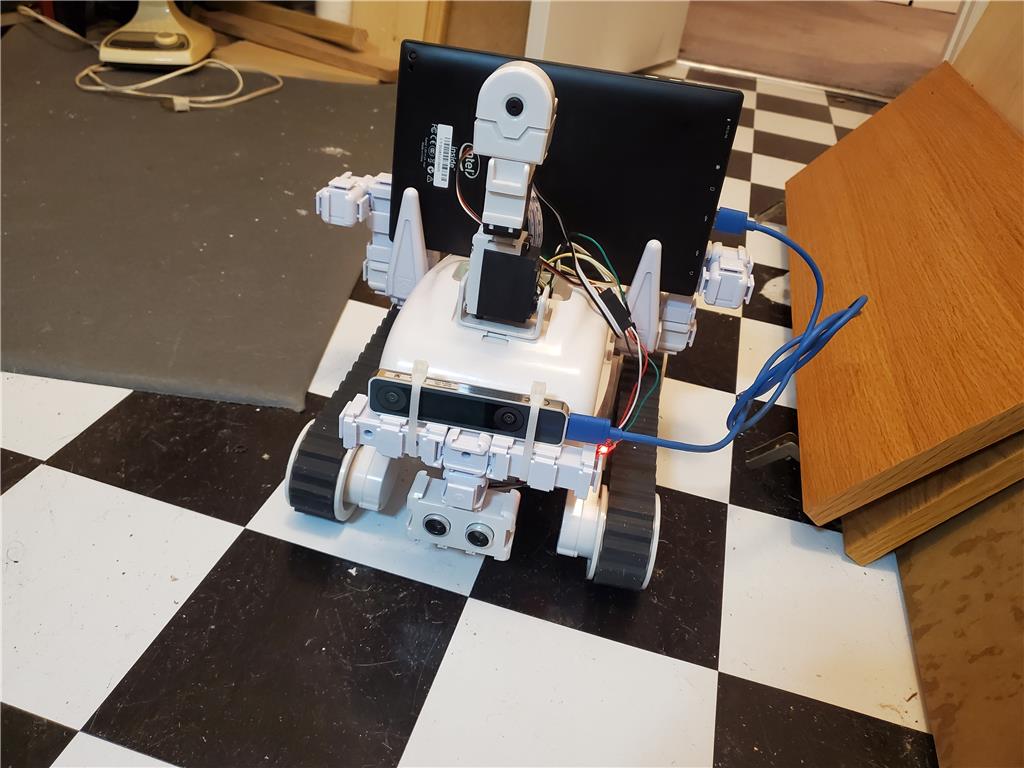
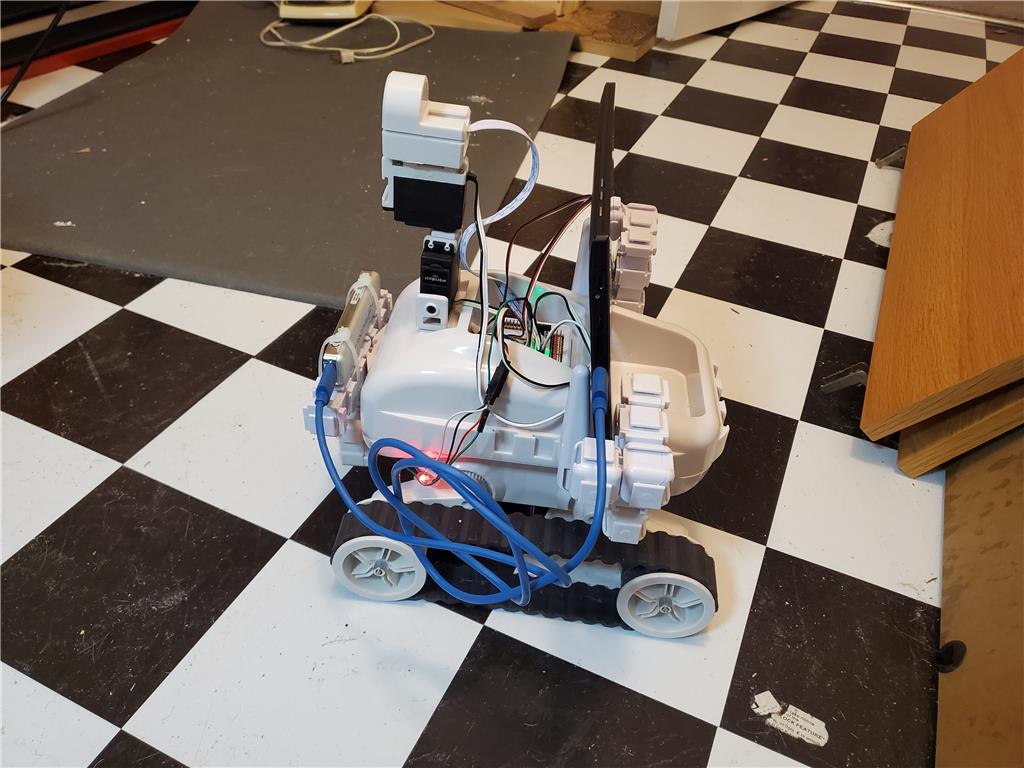

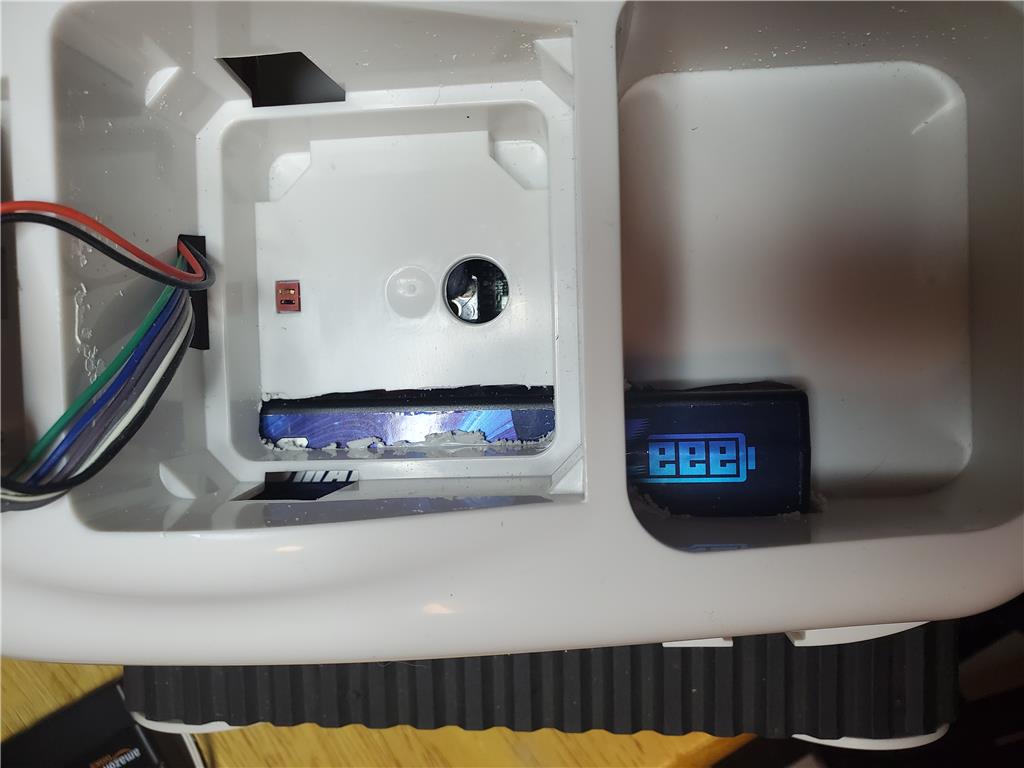
Step one of getting ready to experiment with NMS was to make Roli run more than 15 minutes on a charge. A little surgical procedure with a dremel, and he now has a 7200 mah battery inside the body.

Alan
By thetechguru
— Last update
Discover more robots

DJ's Jd Wants His Rubber Duck
Deciding whether to give it to him-lighthearted reflection on sharing, choice, and a playful "lol"

Cardboardhacker's Ez-Ollie
ez-Ollie: recreate Sphero Ollie with a simple low center-of-gravity build for stable rolling, easy forward drive and...

Justinratliff's Mini B
Mini B robot from Bret Tallent arrived damaged; repairing broken head, camera PCB, neck servo and right arm; RAD power...

haha - we can rebuild him - make him faster, stronger! that battery actually fits quite well.. considering
nice are you going to power SBC and camera off same battery?
@Nink not att his time. The computer has a battery of its own, and this is just a test platform for what will be a scratch build that will probably use SLA batteries. I just wanted more run time than the 1300 mah would give me, and all my 1300's were dead and swollen so I needed a new one anyway.
I had a similar problem with EZ Six robot. Battery was completely discharged after few days. looks swollen now too. Will not re charge either. Dont want fire so will need to add my larger R.C. battery.
I also picked up a couple of 1300mah from Amazon that are the same size as the EZ-Robot provided ones without the insane shipping fees, one for 6 and the other for adventurebot. Interestingly, I ordered a bunch of EZ-Bits from EZ-Robot to use up the last of my credit from answering questions when the forum was there, and they charged me $25 for DHL international shipping, but then shipped UPS from Utah. I guess they got some storage space in the US. Those are on the truck for delivery today.
Not sure how big a battery I could squeeze into a Six, but it would be nice to get longer run time from it too.
Alan
Hello Alan, Looking forward to your navigation project, because I eventually want to get ARC Pro and try navigation. I think I could learn from your build, and gain helpful details. I am a little slower learning now, but want to try new things. Thanks, Steve S
@Steve S,
This is the beginning of my dream for a home robot. There are really three things I want the robot to do, and this can make one of them happen (with some hardware work), and is the beginning of the second.
Self dock for charging. I'll certainly be able to make this happen now that I'll be able to set waypoints and have a method (probably a glyph) to line up on for the charger. My vacuum can do it, my robots should be able to as well.
Fully autonomous navigation. I want the robot to randomly wander around the house looking for cat toys or motion. Pick up the cat toys, and react to the motion. This is the start of that. I should be able to emulate aimless wandering by setting up waypoint to waypoint paths and vary them. That is why I have been involved in he Lidar discussion because I want good object avoidance. Then I would be able to request that it come to a room by just going to that waypoint. Again, the navigation part is all stuff my vacuum can do, but it is purpose build for this, so I understand why it is taking some work to get ARC to that point with everything else it does too. The recognition of motion or people is also easy in ARC. The recognition of various cat toys and picking them up without me controlling the arm is a challenge, but @Nink is working on a similar project and I expect to learn from his experience. This is also the least important part, although if I can get it working perfectly, it would make my robot vacuum more useful because I would not need to go through the house picking up the toys before letting the vacuum do its work.
Follow me, at my heels (like a well trained dog). This will require a different set of skills, although object avoidance will still be part of it. The most promising thing I have looked into so far was an Infrared transceiver kit that Sparkfun sells, where I would wear the transmitter and the robot would try to follow it. It requires soldering on the board, which is a skill I have not mastered, and it is known to not work well outside, so I would need a backup, but I already have the project where I can control my robot from my Android WearOS smartwatch, so that would be OK to help it find me if it gets lost.
Alan
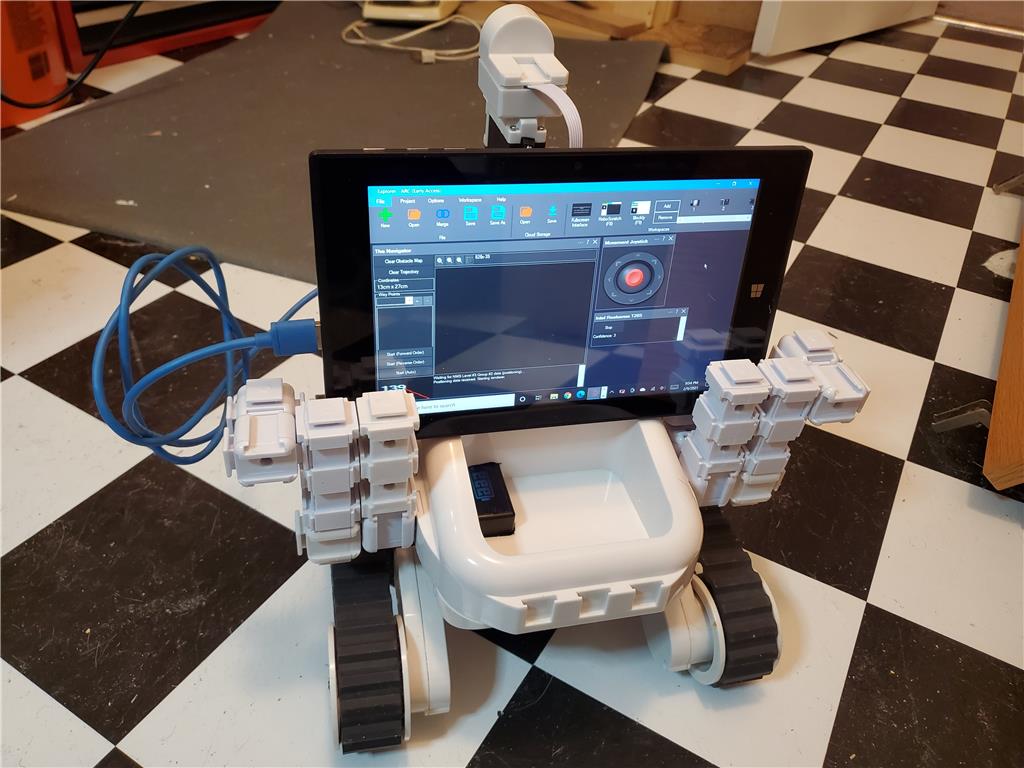
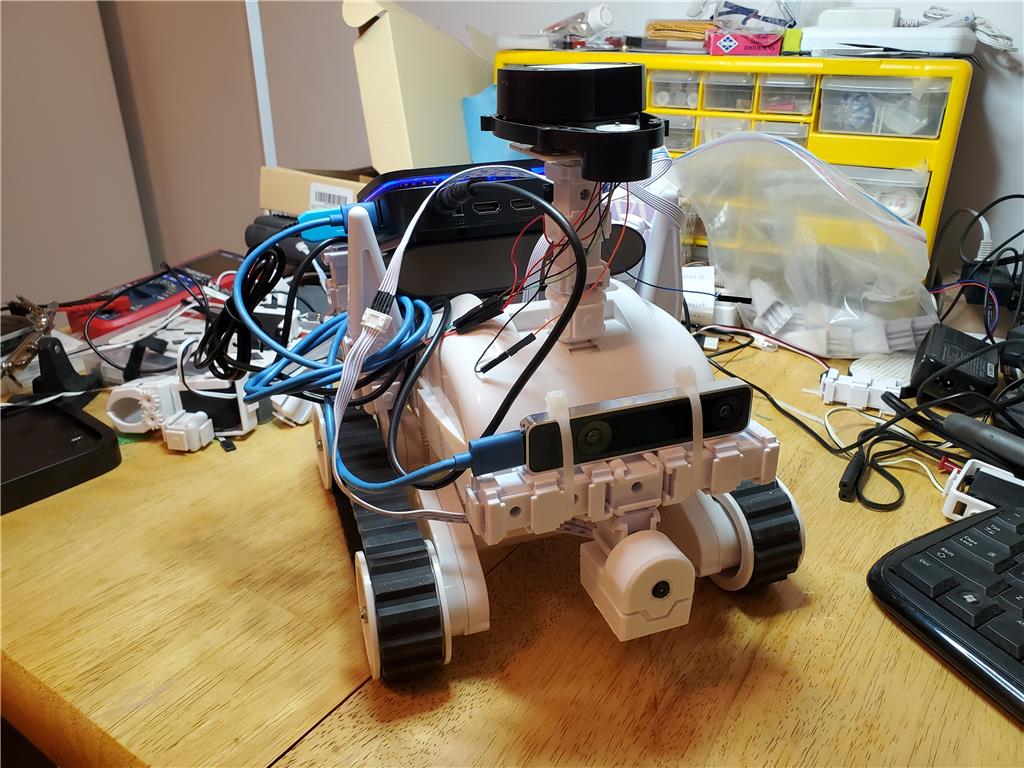
Roli (now named Explorer) is ready to start learning to navigate. I installed but have not set up the ping sensor on the front yet, and I am working in the basement, so I don't need my IR cliff sensor yet. Just going to start with the Realsense and add the ping to the project later when I get the basics down. Unfortunately, I have work in the morning, so bedtime now.