
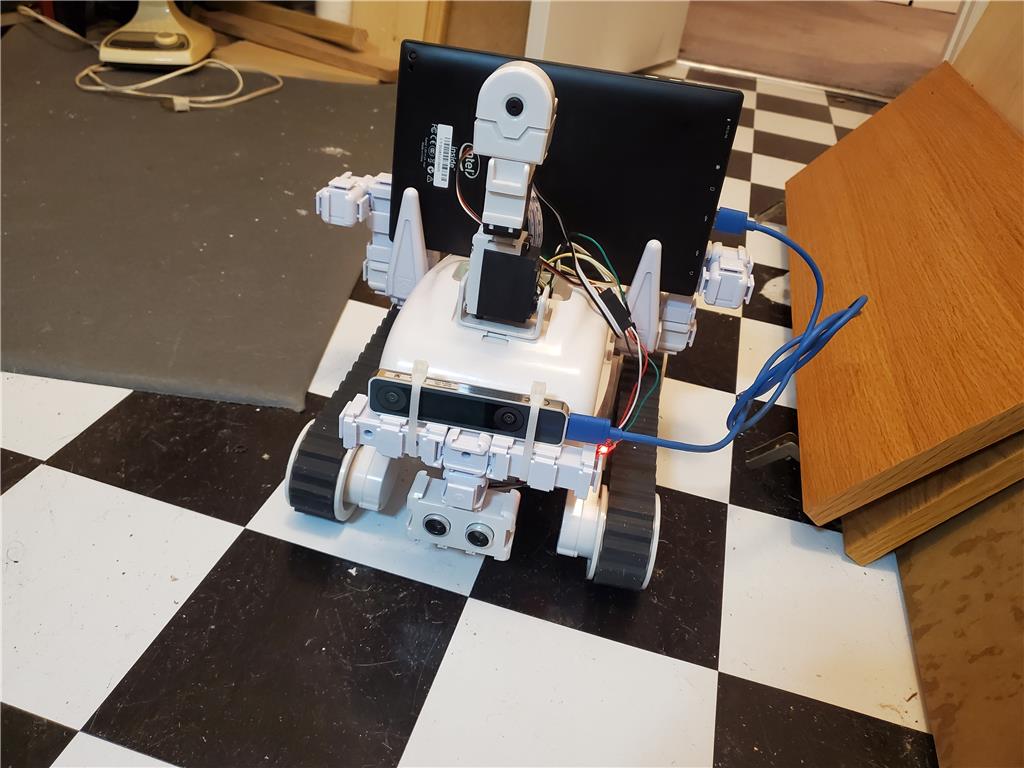

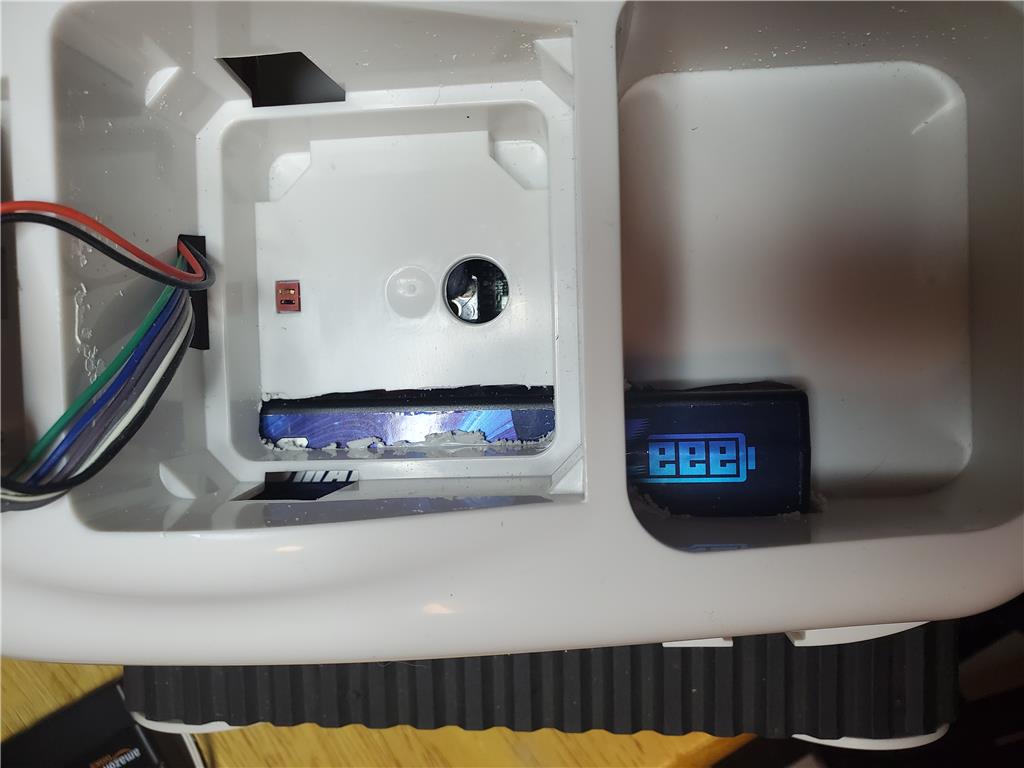
Step one of getting ready to experiment with NMS was to make Roli run more than 15 minutes on a charge. A little surgical procedure with a dremel, and he now has a 7200 mah battery inside the body.

Alan
By thetechguru
— Last update
Discover more robots

R2D2's Robot Sphere (But Call Me Rs)
Robot draws a sphere with low-cost servos and a retractable arm housed in a reinforced 28cm PVC Christmas ball for...
DJ's Intel Realsense T265 Adventures-Bot Part 3
Localize an EZ-Robot AdventureBot with Intel RealSense T265 and Synthiam ARC NMS, waypoint navigation, SLAM prep, lidar...

Stonewolf's Here It Is So Far.
Custom hybrid robot combining RAD 1.0, Robosapien V2 and Omnibot 2000 - first build with parts pending and ongoing...

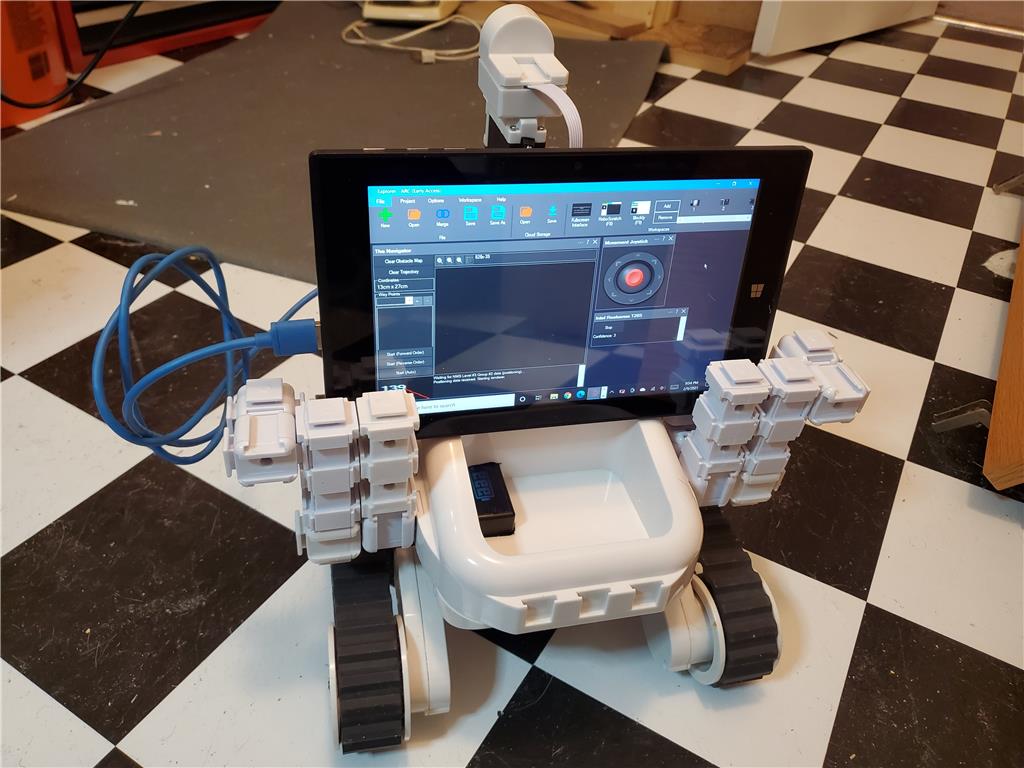
Nice setup. What are the specs of that tablet? The reason why i am asking is because i use a intel compute stick and due to its poor performance navigation is most of the time way off the original path points. If i use my desktop pc with a long USB3 cable, navigation is smooth and spot on. One other thing is that the map created with the ping sensor doesn't really do anything yet, you can drive though the map walls. I hope that the Rock Pi X has enough juice to handle ARC or perhaps i get me a laptop. Stay safe!
@proteusy It is an Intel Atom x5-Z8350 @1.44 ghz with 4gb of RAM. 64gb of main storage and can take a microSD card if I need secondary storage. So pretty much the same as a lot of Chinese made micro PC's. If it doesn't perform well enough, I do have a more powerful micro-PC, but it doesn't have its own screen or battery, and won't fit as nicely in ROLI, but I will probably use it or one like it in the final build (using it on my desktop in the workshop for now and may not want to give that up).
Alan
@Alan, Nice Build! So are you ready to send it to Mars too ?
?
It's the same Intel chip Family (Atom-x5): https://www.notebookcheck.net/Z8350-vs-Z8300-vs-Z8550_8088_6677_8305.247596.0.html Latte Panda, Atomic PI, UpBoard., Intel Compute Stick UpBoard, Rock Pi X.Unfortunately nothing new since 2016.
https://en.wikichip.org/wiki/intel/cores/cherry_trail
Maybe the Atom-x7 is a little better.
@PTP Obrigado, um abraço!
@PTP. The tablet was really cheap ($90), and is way faster than my Acer W8. It is new old stock of a no-name Chinese vendor. Shipped with Windows 8.1 but the eBay vendor updated it to Windows 10. Unfortunately, they had great difficulty getting drivers for US Windows and the manufacturer didn't help. They were able to get everything except the power system. It never shows that the battery is full, usually says that it is at 7%, but it lasts for about 9 hours while saying that it is at 7%, so it is usable, I just never know when it is going to die. Runs on 5V though, so will be really easy to provide external power in the permanent build if I decide to stick with it.
Alan
So, last night I forgot to turn Roli off after I was finished working with the Lidar for the night. It was totally idle, but still connected to the network. I remembered this morning 12 hours later and it was still connected to the network, so had not hit critical low state yet
Alan
Geez that's a long time! Pretty great efficiency on your setup
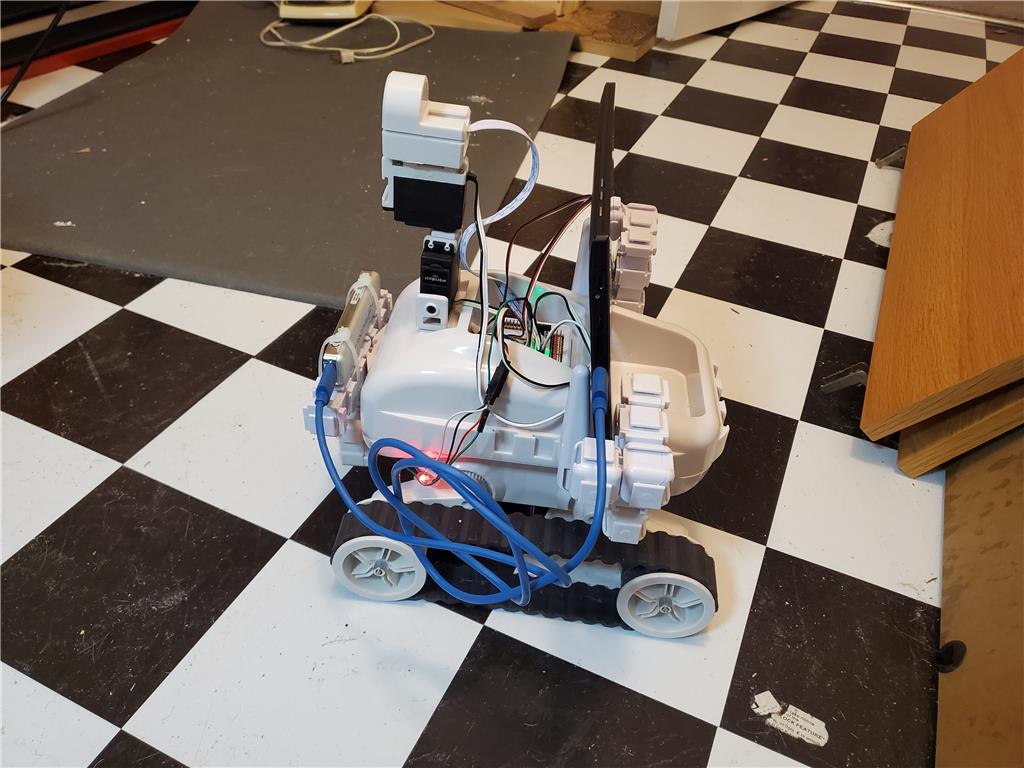
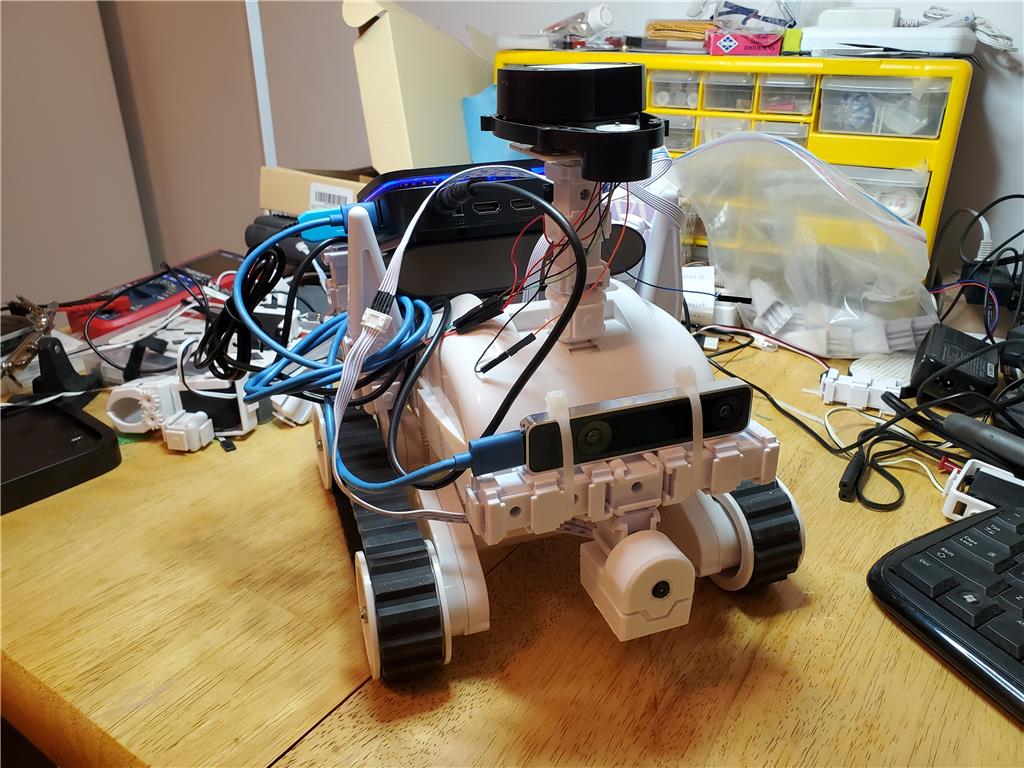
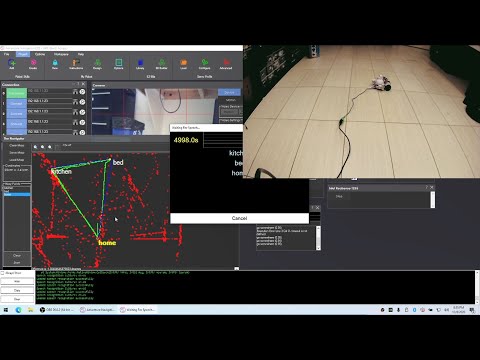
A few updates. The tablet worked OK with the Realsense, but only had 1 USB 3 port, and the Lidar, even plugged into the USB 3 port was not able to be set at the optimum data speed, and as I mentioned before, it had some issues with battery management. It turns out that running Realsense and Lidar the batter only lasted about 30 minutes. I have a powered USB hub solution for my eventual build, but it would not fit in Roli, so I picket up a high capacity power bank with adjustable output, and out a small (not quite SBC) computer on board runing headless instead.
I'll be posting some questions/suggestions in the Navigator thread tomorrow with lessons learned having thr Lidar, and my be ordering thr Realsense distance sensor while they are still available. I'll probably be putting thr Ping sensor back on the front too for better front object detection nearer to the floor, but this is the build for now.
Please excuse the sloppy wiring. This is just a temporary test setup, SO I didn't spend a lot of time on cable management.