






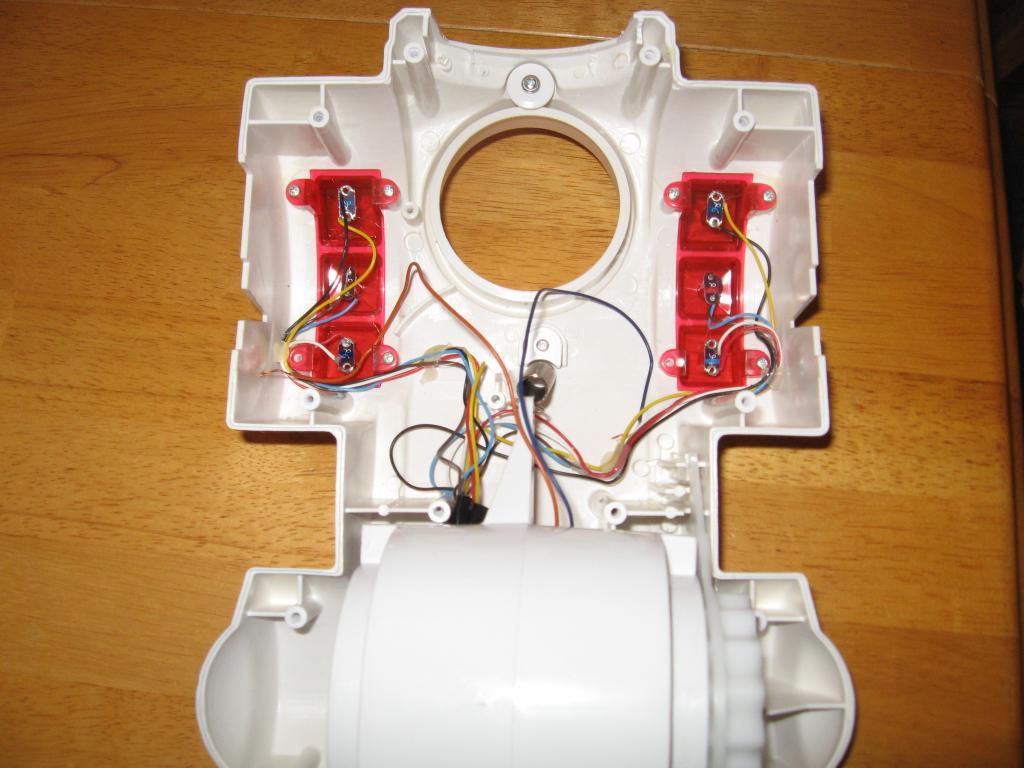






Hey all. I was really excited when my EZ-B arrived about a week ago. While it was on its way I was searching around for my first project. Thanks to DJ's great website and Ebay I found what I wanted. I picked up a RAD 2.0 for 15 bucks. It did not have any remote or battery charger (so what). And today I started on it! I hope to post my progress here and open to any ideas you all might have. As you can see I wasted no time before I opened it up!
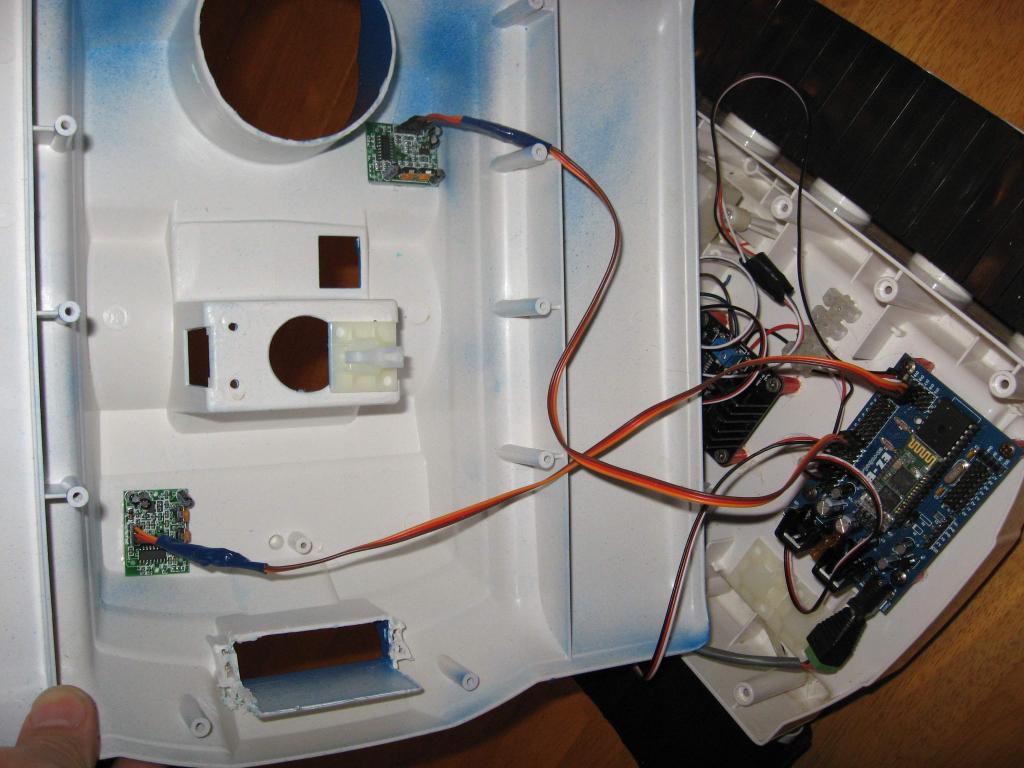
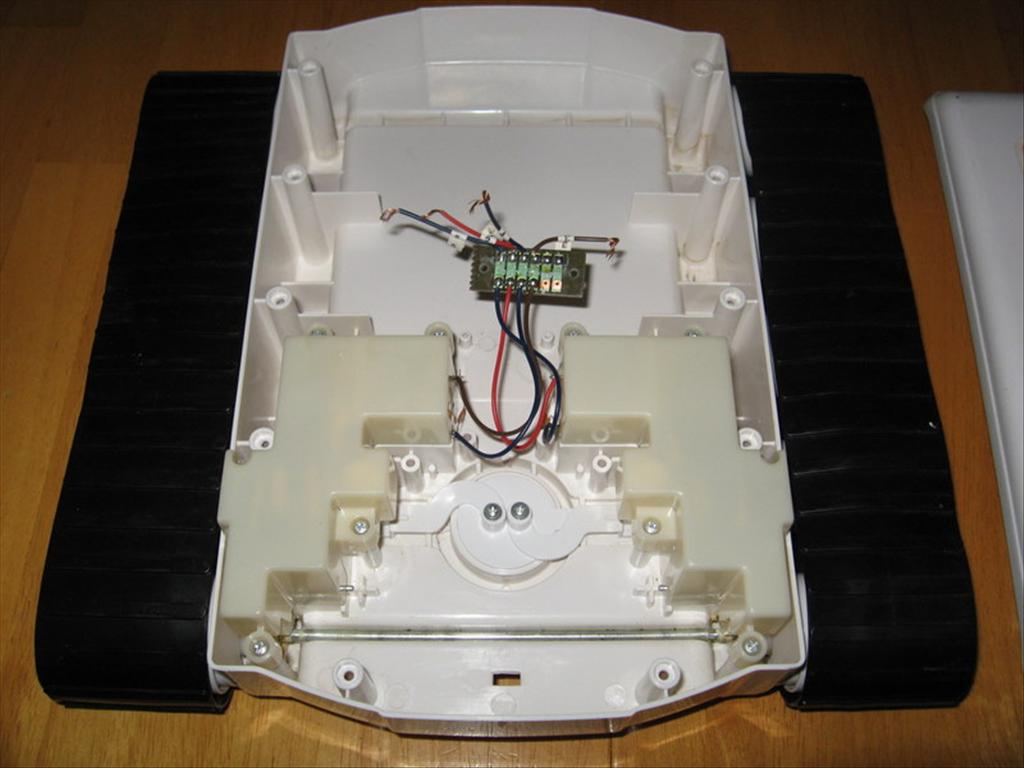
The RAD 2.0 has what looks like a decent track base with motors and gear boxes (a bit loud when I tried out the motors). It has a physical gearbox selector switch for High and Low gearing (I will need to put a servo on that) which will be cool to mess with. The interesting thing about this guy is that he bends at the waist. He also has two arms that work together to grasp an object. It looks like can bend all the way over and pick up an object on the floor (we shall see). After opening it up I noticed it appears to be a decent thing to start modding.
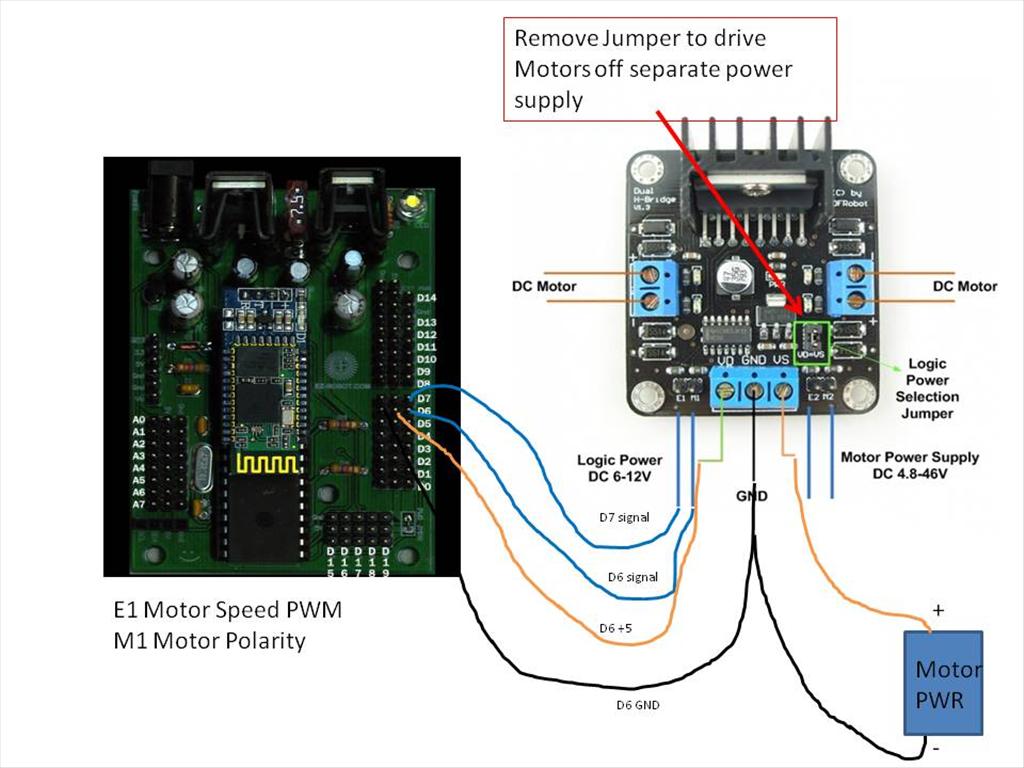
I have an H bridge on the way for the track motors and I probably going to need another if I want to use the existing motors that control the waist and arm movements. I am thinking of putting in a accelerometer as well so when the bot goes up or down hills it could stabilize itself automatically! It will surely have a distance sensor...just not sure where to put it yet, camera, and probably go with an MP3 trigger. You may notice the circle on his chest...The original toy was remote control and could fire nerflike darts (pretty neat). Not sure I will keep that functionality as I am thinking of other cool gadgets to hook up to him. Tonight I tackled the head movement.....I will post more on that later.....
Kevin




Discover more robots
Ptp's Ezb V4 Custom Firmware V2

Boon's Boon's Robot


@robotmaker ,
Great score...looking forward to seeing more hacked RADs!
JT, I am very much looking forward to learning about the LEAF, LISP and all that AI stuff...would be a great topic to start a thread to get more folks interested because I bet there would be lots!
v/r
Kevin
@ robotmaker , congrats on your new addition to your family! RAD is a bit tight for storing gear. Due to space I ditched the tray for now....and cut the indented cylnder (where the tray slides in) on the base....that frees up quite a bit of space.....if you look in my vids you can see that there is a hole there. I may look into putting the tray on some time in the future...we shall see. Lots of screws...yep.....Good Luck!
btw...getting LISP going now to check it out...
v/r
Kevin
i got the rad about,lot and lot of screws,now clean and bag him for a hack latter,need to order parts for him early and may cut and get it ready,then clean great day for me ,my EZB came in i ordered 2 of them ,have 3 now for 3 hacks should have my brookstone ROVER project done this week
@KKEAST thats what i was going to do cut the cylinder too,for room also the head has room too,so thinking it should fit no problem PICO computer board,and extra power source
update everything fits including 2 6 volt batteries now back to my brookstone rover project
@kkeast you said you are using a servo to control the speed,better idea is leave in low for high torque and use PWM to control the speed ,at high mode you wont get much torque
also if need more torque i found that rs-385sh motor will work and fits it is longer,but still can put 2 in and have space left over 3 points rad will have about 8 times or more as torque per wheel on each side so double is 16 it is a 12 volt motor and need a 4 amps per motor stall now if need to run it at 6 volts can be done too but about half or another motor at 6 volts using 8 amps stall torque is rs-360sh motors are on ebay or can use the ones in a roomba ,it uses rs-385sh,thats the one i am using for rad and used before on other robots,on roomba i upgrade the motor and h-circuit,so i have lot left for my robot projects very good high torque motor
@ robotmaker ,
I keep the motors in low gear mostly. My next thing will be to get the PWM speed control on my H Bridge going. I need to experiment with the PWM control to do motor speed using a script. I have not experimented with the PWM on the motors yet. They are hooked up to the signal but I am simply treating them as Digital (max PWM) right now.
It is fun to run the RAD with the high gear though. It really moves along!
I have not had a problem with torque on the bot. I suppose it depends on what you want to use the bot for. If it just moving around the existing motors are fine. In face this thing will climb right up the wall if you don't stop it.
@kkeast and others i designed h-bridge design and pcb boards all info in zip file,made this design awhile back and sold many boards if anyone needs to buy the boards let me know,more that buy the boards the lower the cost to have it made ,boards are in 2 parts ,main reason is that the board is universal logic circuit on one board and pwm h-bridge on another rated at 60 amp cont,but you can easy remove mosfets to save money,remove 4 of the 8 mosfets give you 30 amps i dont get money from this and dont need it HBRIDGE.zip files in bmp and sch and parts list
Wow..you guys do great stuff with robots, Legion is so cool! I will be trying to add some AI with the help of the Leaf project too. Also, EventGhost looks really interesting too, I will most definitly look at that aswell. You guys are so handy with all this stuff, thats really inspirational, it gives me so much new ideas! Excellent work!
Kristian.
@Kevin - hey, are you going to add code to Legion? Make him more autonimous? Or just stick with the remote control? I have decided to keep Bob as joystick control and did not add sound to him. He is a cool little bot that I can play with ideas on. My next bot (the 2 foot B9) will have more autonimous functions, as well as joystick. Then my big bot will be imbedded computing. If you are doing a combination of joystick and AI on Legion it sounds like we are on the same page. Perhaps I could pick you brain?
Did you add any sound deadening to the drive section? How loud is Legion? I am using the RAD bas for B9.