
















-635425708661417124.jpg)

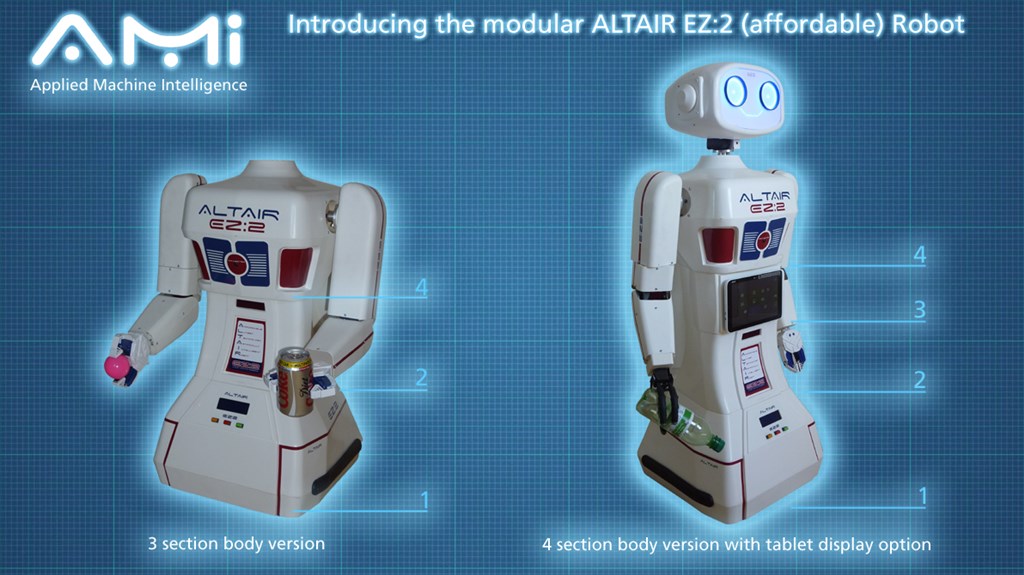
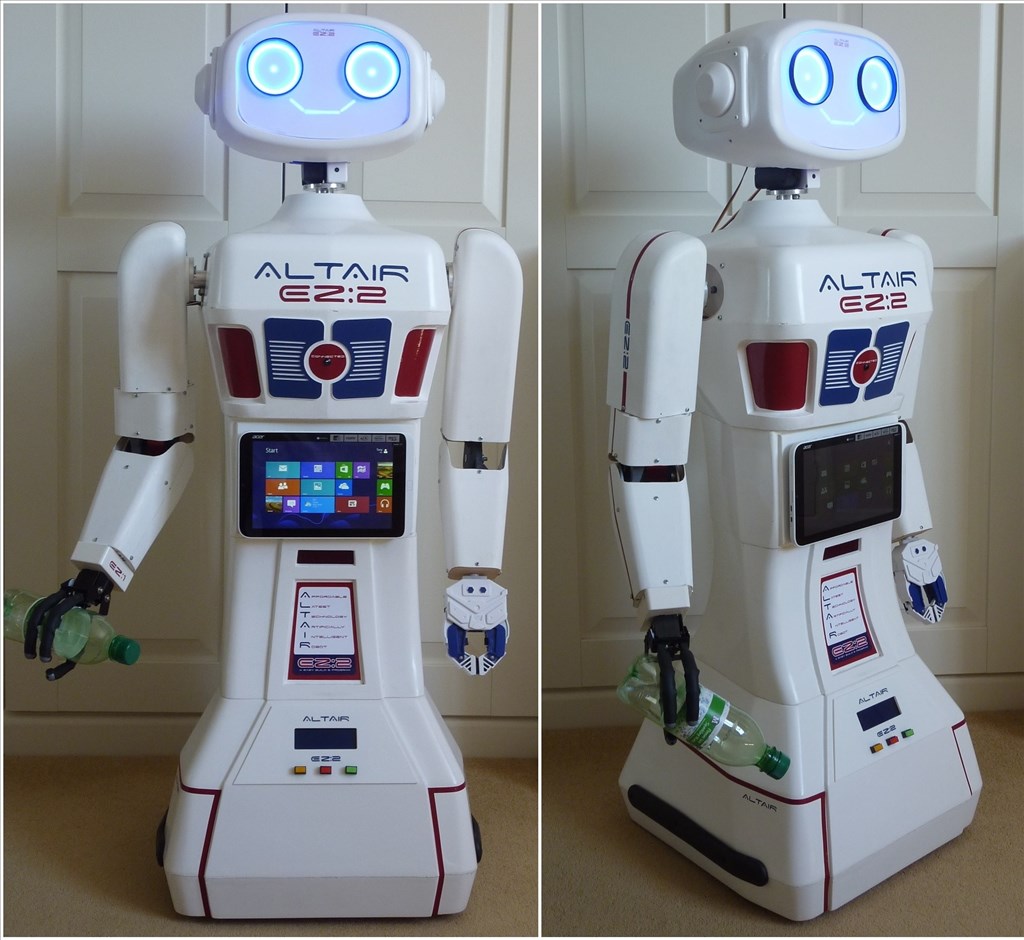
Introducing the ALTAIR (Affordable Latest Technology Artificially Intelligent Robot) EZ:2 Robot
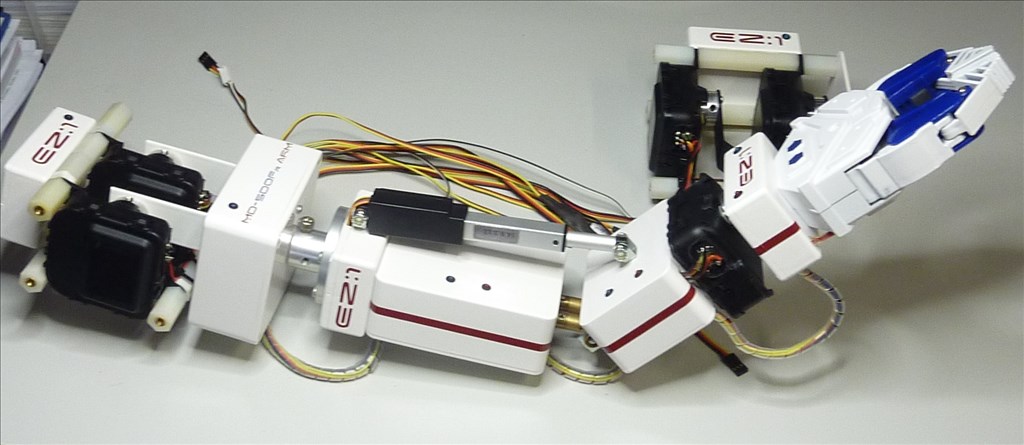
The first unveiling of the EZ;2 Robot (the commercial version of the EZ:1 Robot that has been seen on this forum) - you guys are seeing the EZ:2 first!
I am proud to confirm that it will have "EZ-Robot inside" and powered by the awesome V4 - well done DJ and the EZ-Robot team for making such a great product that allows robots like the EZ:2 to be light years ahead of the competition!
The EZ:2 will also have face and object recognition capabilities and our advanced Ai engine and will work together with the ARC software.
Because we have been waiting to design in the incredible EZ-Robot V4, we are behind on our development schedule (but it is worth waiting for) and we will now start beta testing in 2015.
I wanted the EZ:2 to look like a robot and not a humanoid and you will see this reflected in the design. I guess not everyone will like the design, but it is practical for (low cost) mass production and because of its modular build transportation costs are reduced.
Hope you all like the EZ:2.
Tony
Discover more robots

Ezang's Life Is Like A Tight Rope, Do You Agree?
Cem's Inmoov With 7 Touch Screen Display And Lattepanda...


@Tonymaker:
Nice work!
you have two cameras, i presume the reason is different hardware sensors, otherwise one single camera could feed multiple functionalities.
thermal sensor, is an array sensor (how many cells) or a single cell ?
left & right PIR ... is it like an eye in back of the head
Cheers.
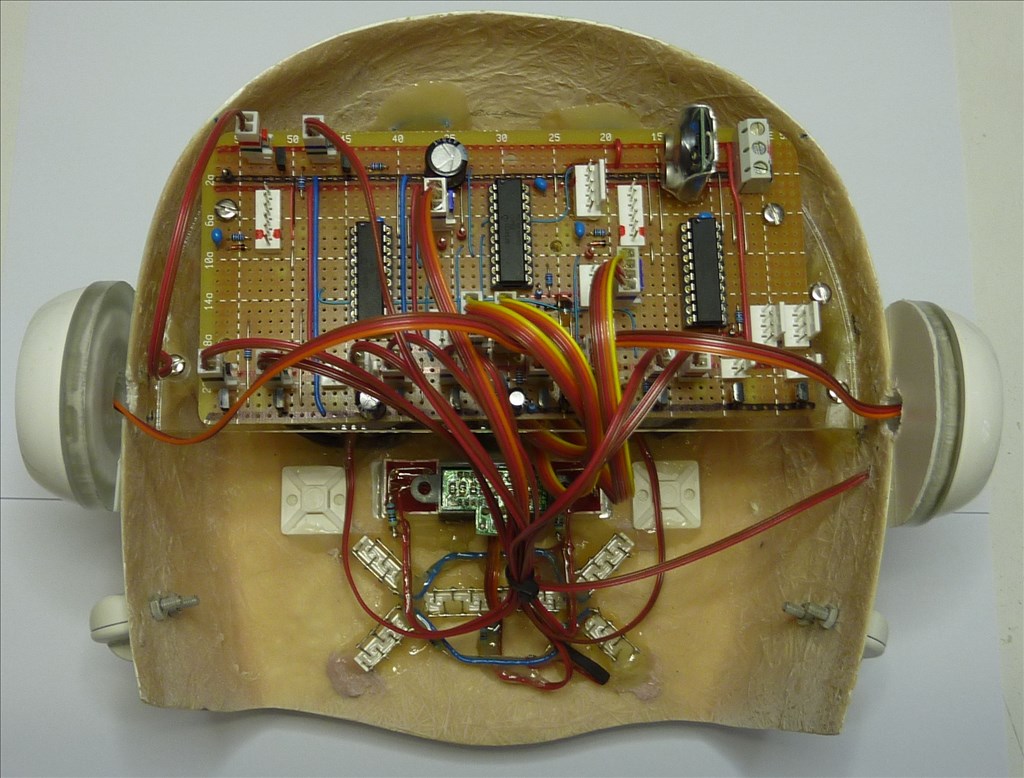
Both cameras are needed as they have different unique functions.
The thermal sensor has 9 pixels 8 for thermal data and 1 that gives the ambient temp in front of the robot.
The PIRs let the EZ:1 sense humans on the left or right hand side it also measures the amount of movement each side so it gets a rough idea of how many people (if any) that are on each side. The sound localization works similar and lets the robot know what direction the sound/speech is coming from so it can face it and analyse what is the source.
With these systems the EZ:1 can decide which is the most interesting side to next look at.
Tony
This looks so awesome. Is it available is the US?
I agree with Dave, that is a lot of magic packed into one very head!
Tony, I'd love to hear about the PIR sensors you are using and how you control them and filter their reading? The PIR sensors I have give either a high-low output values for movement or no movement and usually trigger for just about anything moving, including the robot.
@Toymaker, very nice. I thought you had already released your robot to the public? Anyway love the head setup!
Could I ask how the sound localization mic's work? I remember sometime back someone had wrote a script to use two microphones, which I was never able to get it to work correctly. It would be great for it to work like the old R2-D2 thanks.
I use these Panasonic sensors they do require a few external components.
uk.farnell.com/panasonic-electric-works/amn31112j/sensor-motion-5m-100-82-white/dp/1373711
The head sensor PIC looks at the PIRs outputs pulse length/repetitions and can then estimate how much human activity is occurring each side. All head sensory data is compressed into a data packet and sent to the v4 which is the master controller.
On sound localization I use a cross-correlation function that is quite complicated and requires a dedicated microcontroller - it can track sound with an accuracy of around 5 degrees in front and 9 degrees sides.
Tony
Thanks Tony, did you R&D the sound localization yourself, do you sell them or is there a supplier that retails these sound localizers.
I would love to us it in my Inmoov.
Thanks
Hi.. simple question. Is it for sale? If so, where and how much it would cost one unit? Thanks!