



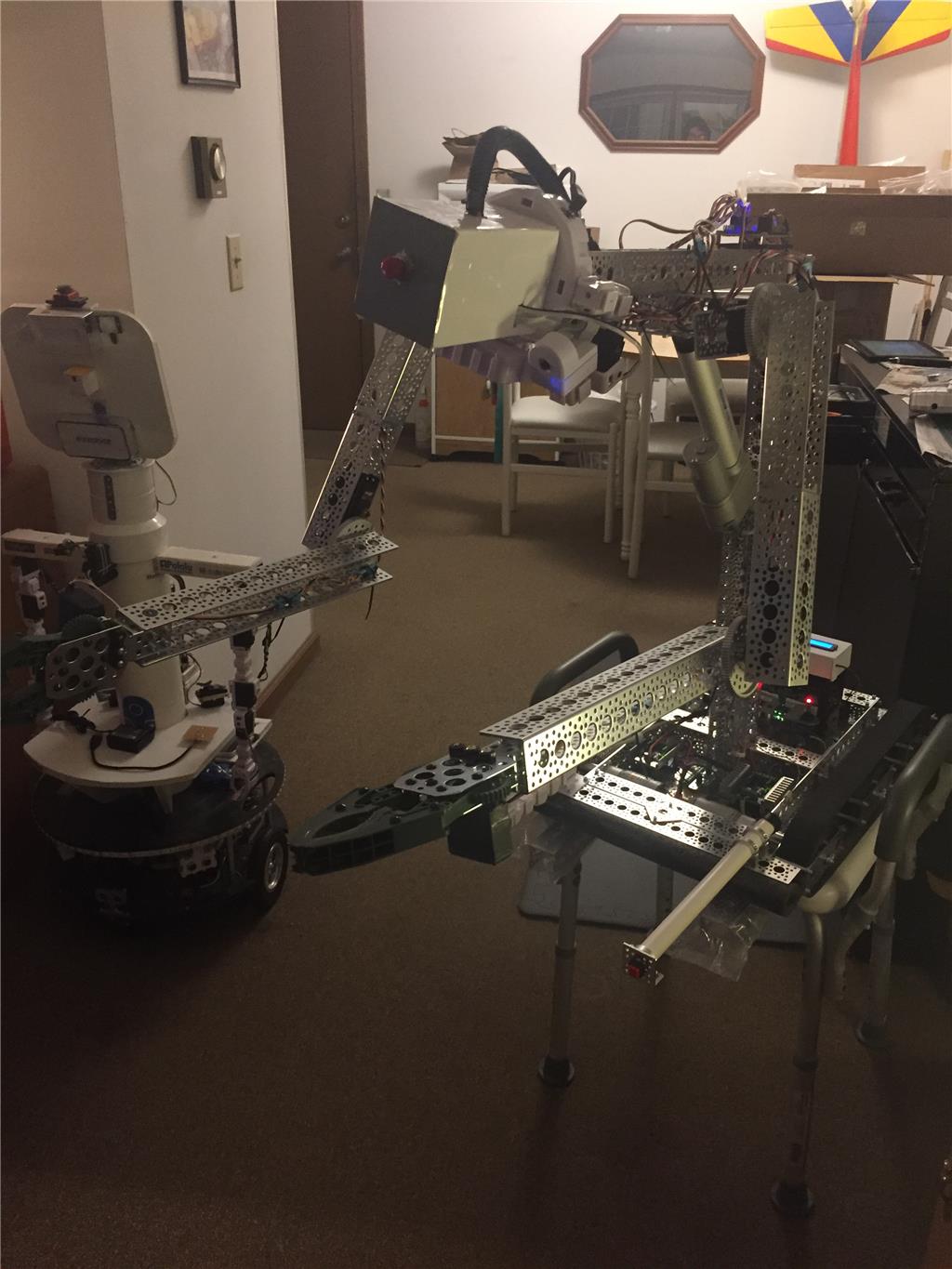







Hi Gang ! So Ive finally got my project to a point to where Id like to show what I have been working on, which I actually started around october of 2019. Its still ways off from being finished, but I wanted to show you the major part of it.
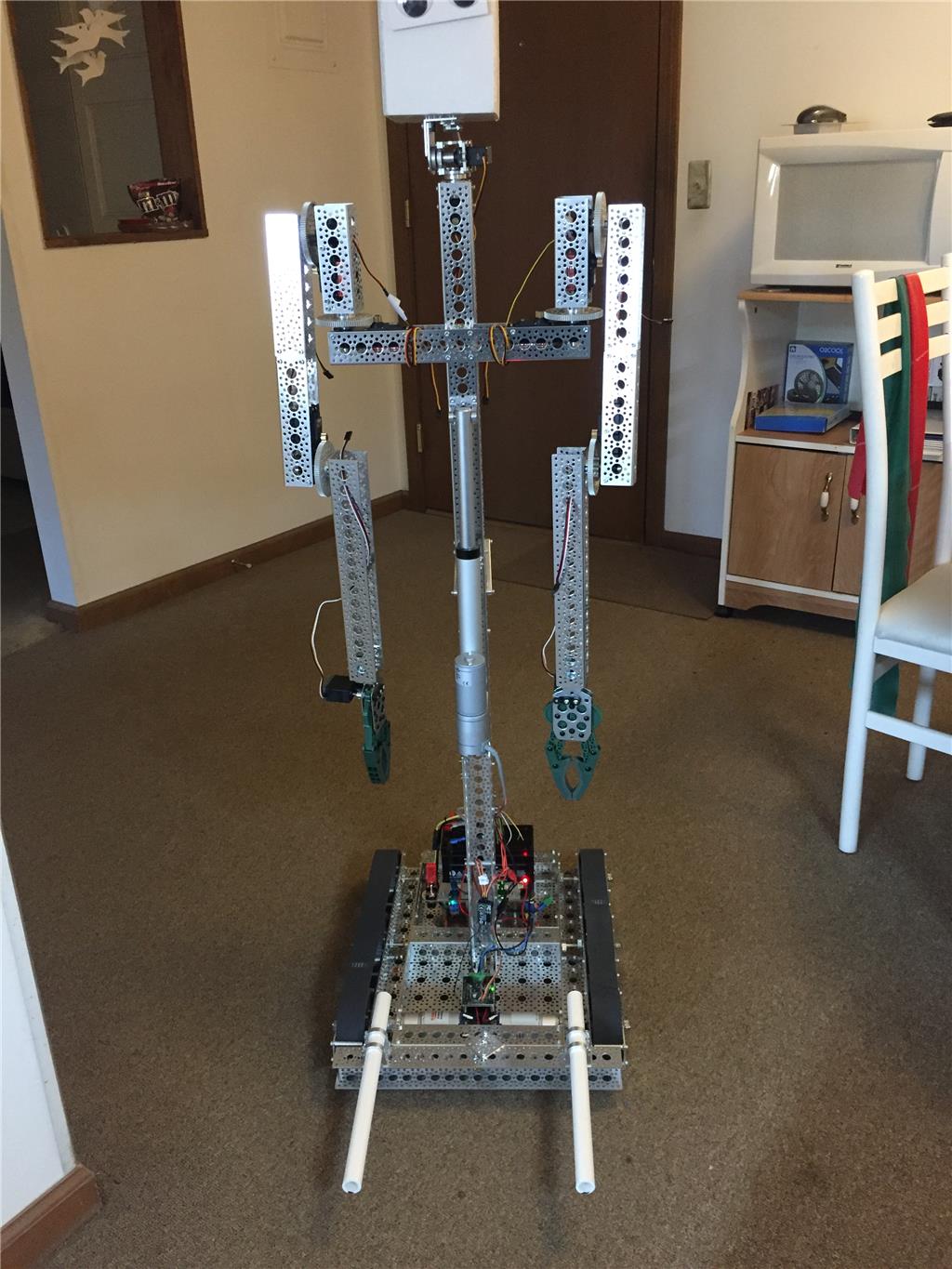
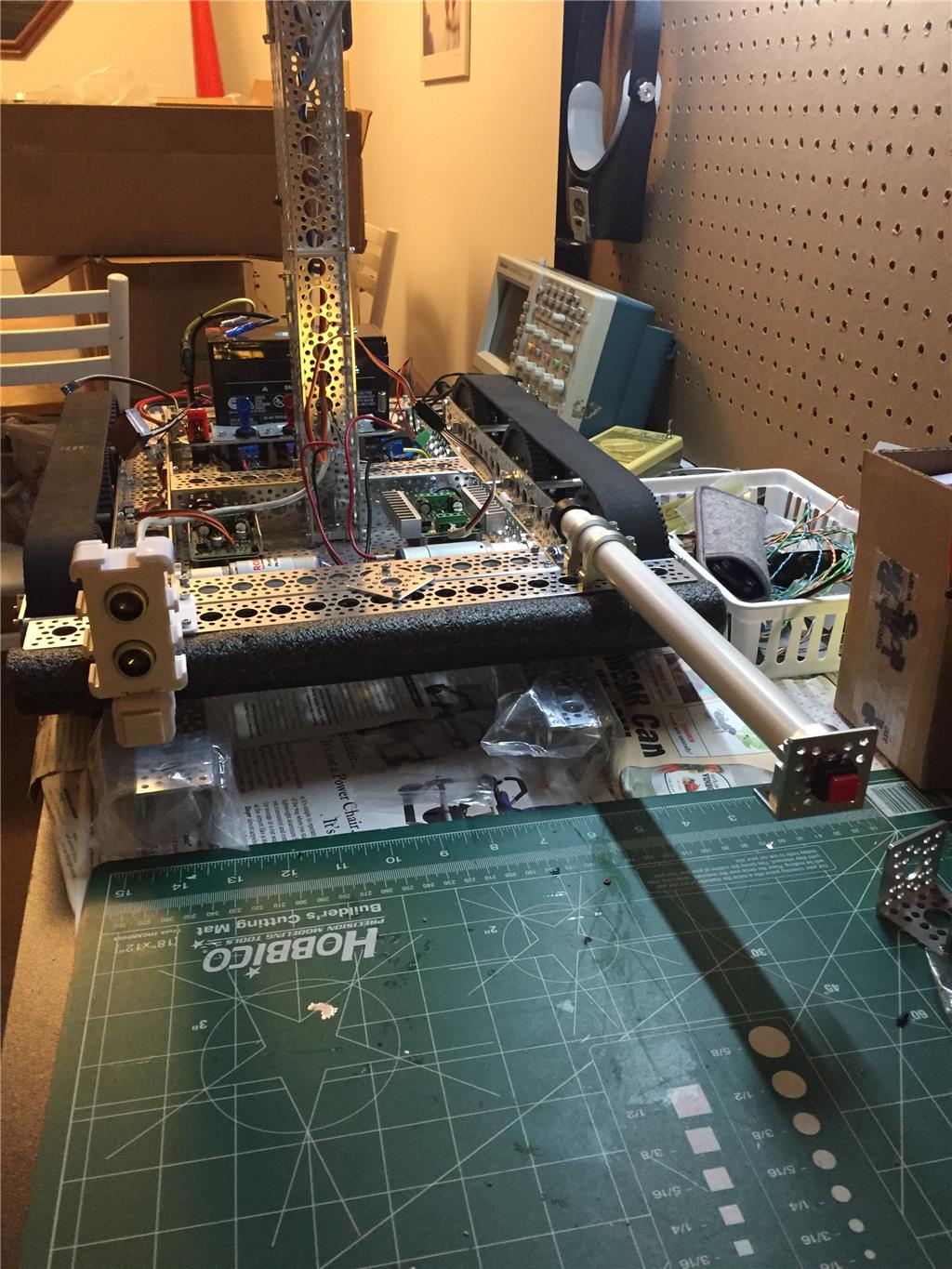
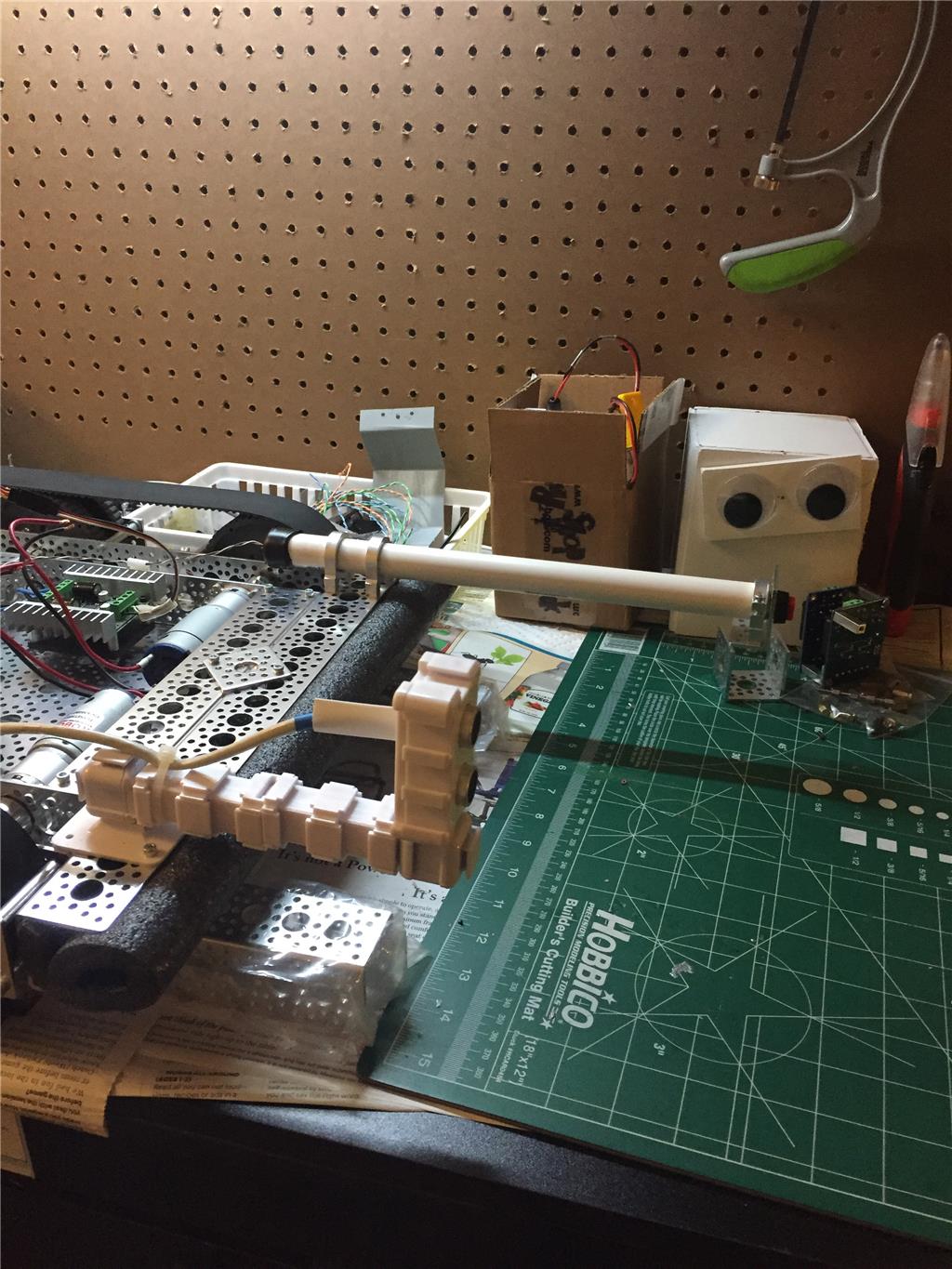
This design stands a lil over 65 inches tall. Currently weighs in about 40lbs. Is mostly made from Servocity Actobotics metal parts and some very high torque servos (3402 oz/in), a torso actuator(180lb thrust) ,Vex grippers and much more...
The main goal of this design is to help lift a person up; as in from a sitting position from a chair or wheelchair ,turn, then lower the person back down onto another chair (they call this "Transfering" among the nursing community). I got the idea from all the times that either me or an aide/nurse has to lift and move my mom around in her home. I know that there are lift chairs out there than do this, but I want to see if a real robot could be built to do it too.
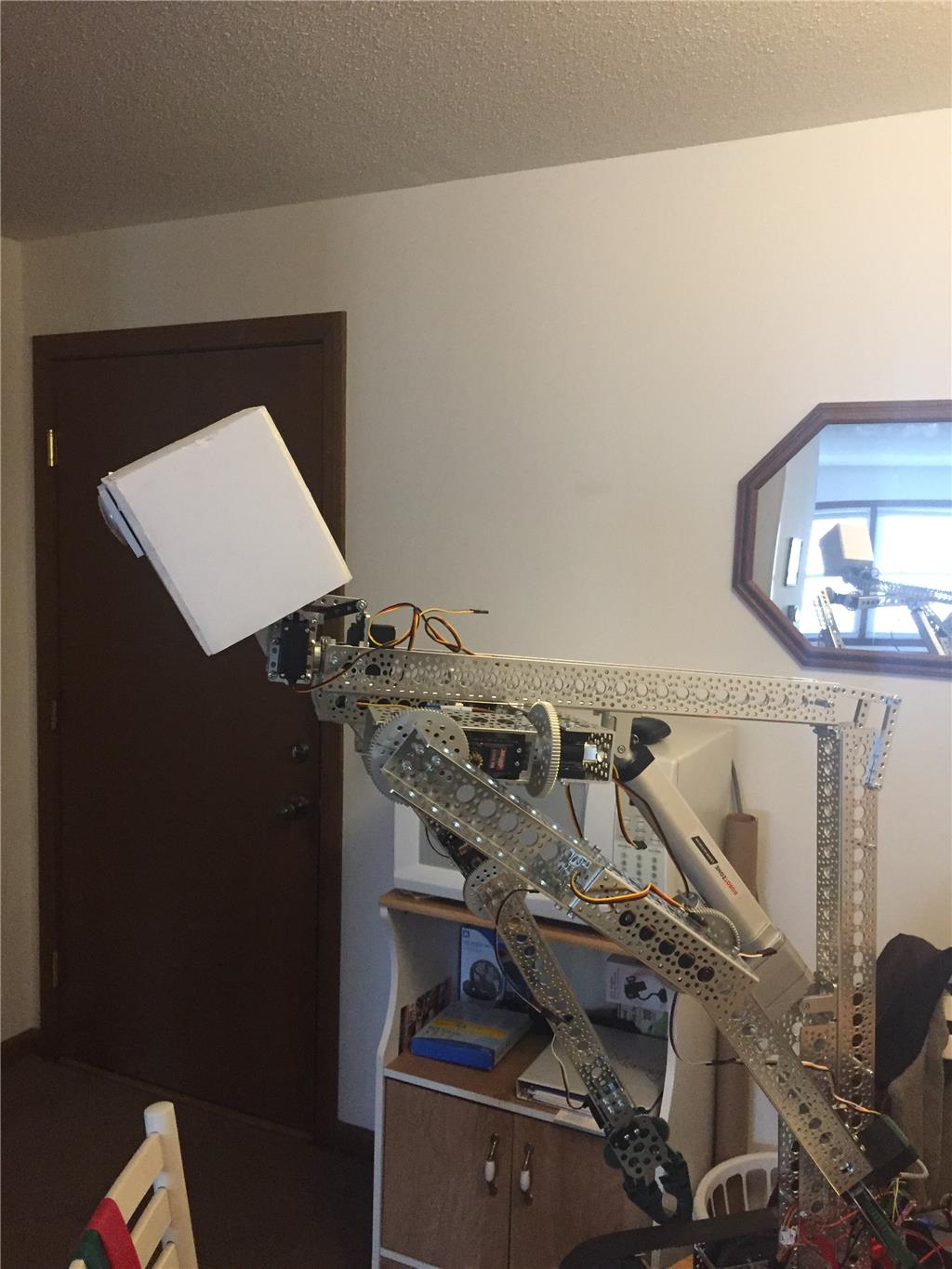
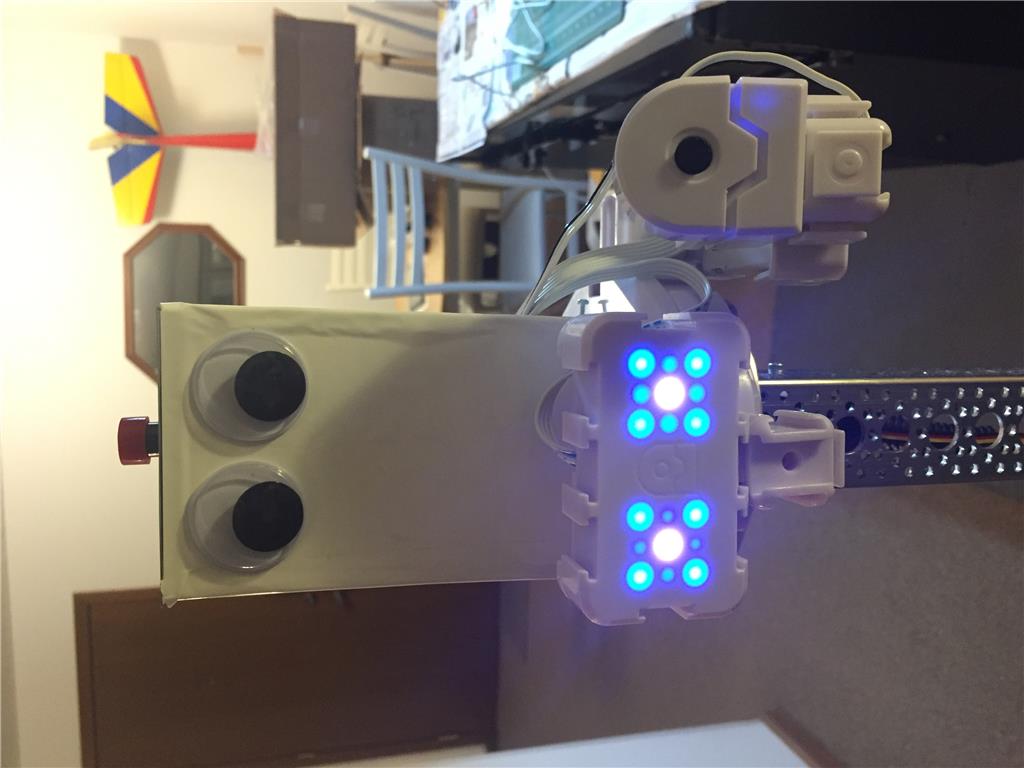
HEMI is currently partly RC controlled right now, but I will be using EZB along the way to perfom the many task that the EZB can do. One thing you will note in this picture is the 2 white pvc tubes protruding outward from the front. these in time will have an Ultrasonic sensor and a bumper switch, and will be used to carefully roll up to the person sitting in a chair (your feet would go in between the white tubes and your toes would touch a large rubber stopper when the robot comes to a stop,holding the feet in place before the lifting. The idea then is that HEMI will bend over forward, while its arms extend outward, safelty grabbing and holding the person, then will rise up till the robot is basicaly fully upright and the person is now in a standing position being held up by the robot. Then to be turned and lowered back down onto another chair ie: wheelchair for an aide/nurse to do whatever is next.

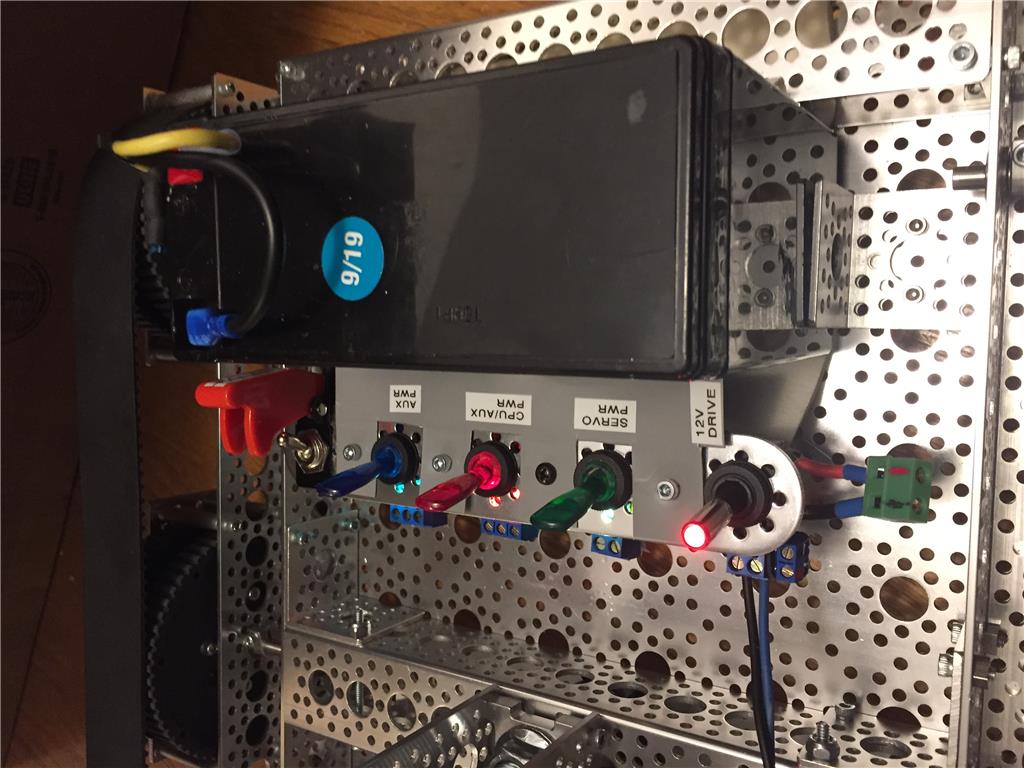
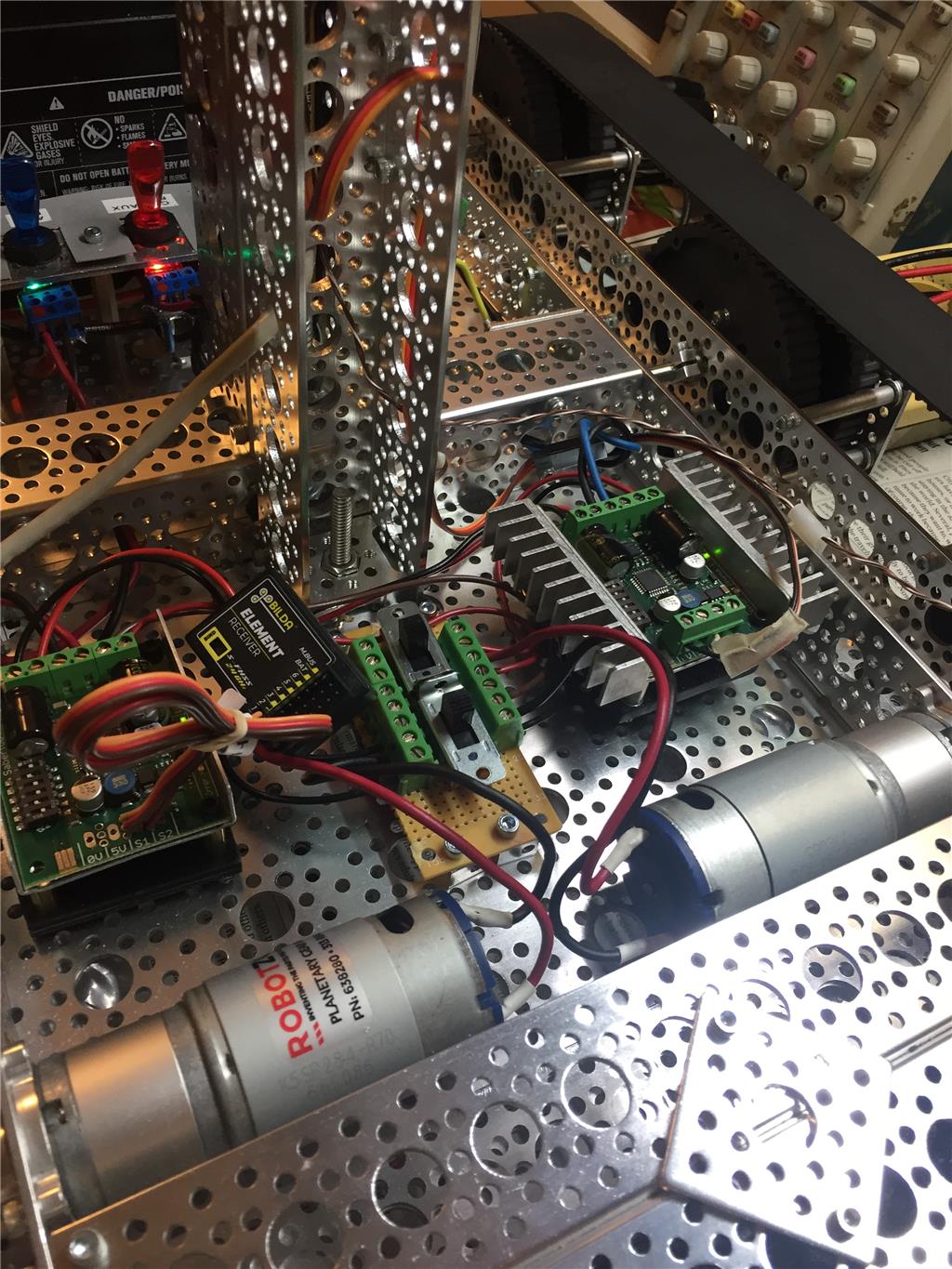
More pics and a couple videos to come as I keep adding to it. Next major hurtle is to add a SSC32, wire the servos and the means to power them.
Discover more robots

Ezang's Following, Tracking The Blue Line With ARC

Pashley's Jd Days


Hi EzAng, Yea, I did read that, and have been trying it at both the 38.4 and the 9600 bauds with same results. But I think I may have discovered something that may have been the issue. I have to experiment more before I conclude the results. Will see

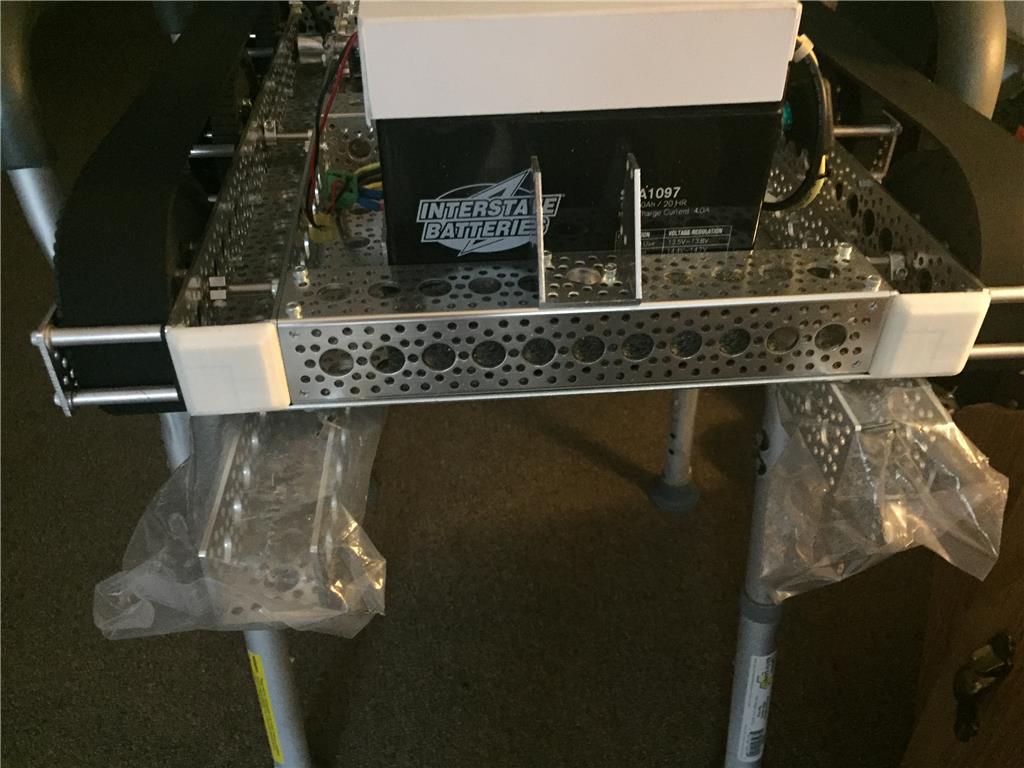
Found some EndCap files for the Actobotics C channel that I could 3D print, orinted them in PLA.did you figure it out?
Good morning RoboHappy,
How is it going? Any robot advancements?
EzAng
Nothing too new, I have re-editing some of the Auto positions I've been working on. Playing around with Pandora some, and looking to change out the controller to the Torso Actuator to gain some better Auto Position control. I still havent 100% nailed down the drive issue with the sabertooth moving on its own but have noticed its not such a big issue with the a Roboclaw controller, odd yes. Had to move a Head servo from the SSC32, so that I could get the servospeed function to work (way better now). Face req and object req are on the list down the road
Might even look into building HEMI #2, The idea is to build it better based on what I'm learning from Hemi #1. Stay tuned.....
in the Auto position, what do you use to go forward and reverse in a script? for robot arms not wheels
I sorta go the route of the old movie maker idea. Moving one joint at a time. I create afram for each jooint seperately, one frame for say a Left elbow up, then another frame left elbow down, same for the shoulders and grippers, Then I can of course create Actions based on the those frames. In a script, which is activated by a voice command, I look for the Autoposition that was created under the Cheat Sheet section and simply click and paste that into the script. I can try and take a snapshot of how Im doing it if that will help.
ok sounds good, a snapshot
On a different note, have you heard of James Burton, robot builder?
If so, what is your take on him.
Thanks