



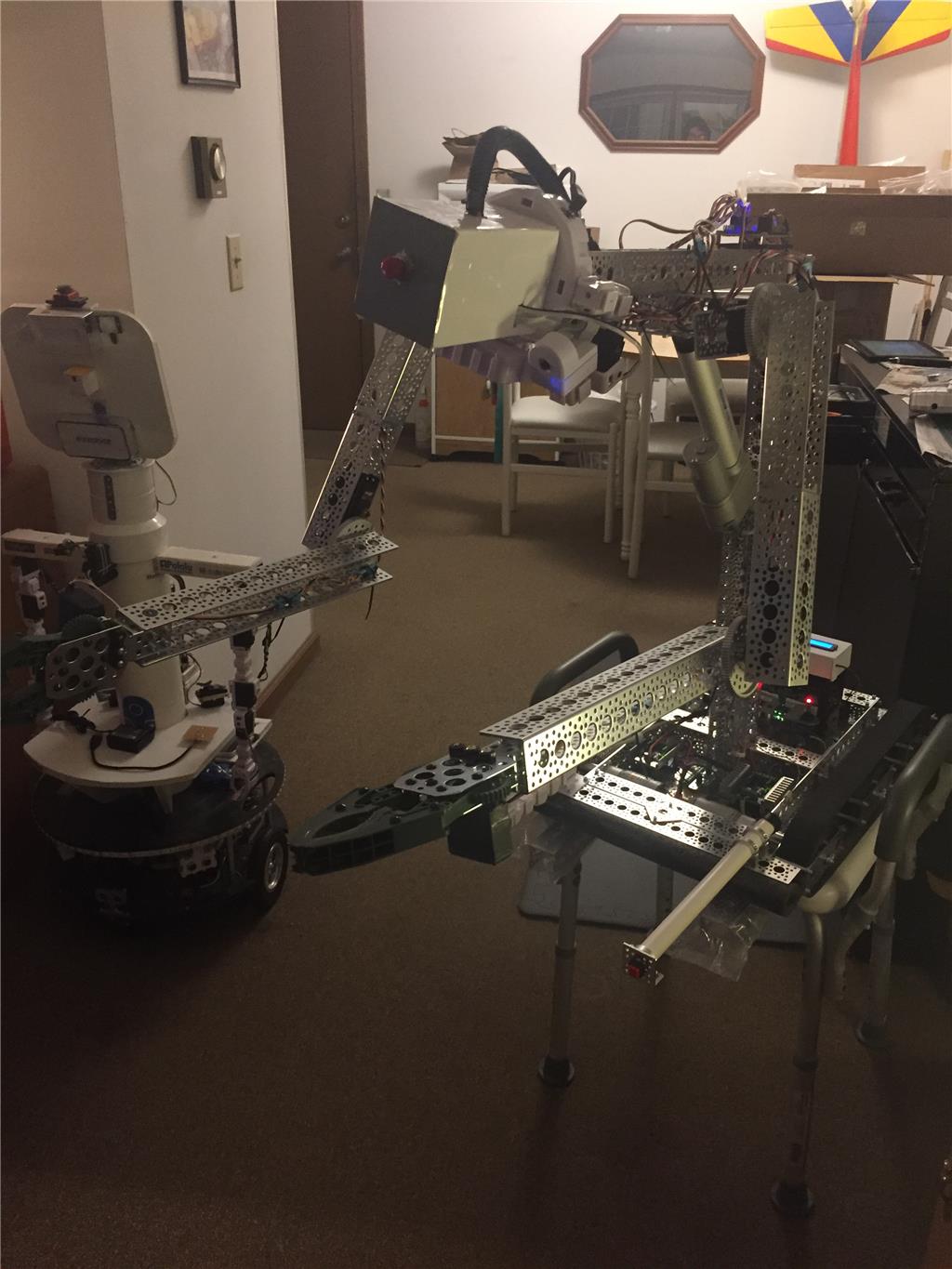







Hi Gang ! So Ive finally got my project to a point to where Id like to show what I have been working on, which I actually started around october of 2019. Its still ways off from being finished, but I wanted to show you the major part of it.
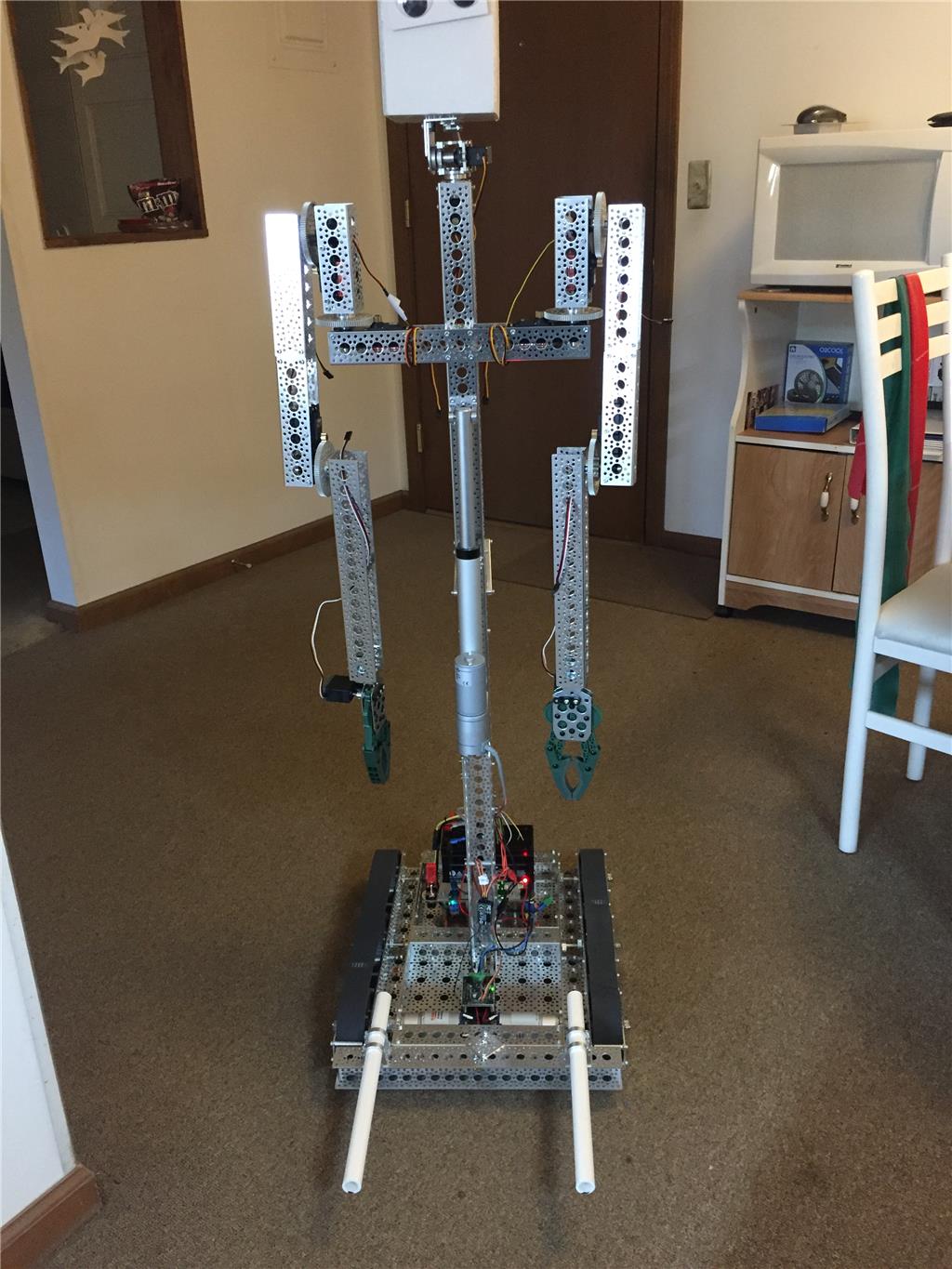
This design stands a lil over 65 inches tall. Currently weighs in about 40lbs. Is mostly made from Servocity Actobotics metal parts and some very high torque servos (3402 oz/in), a torso actuator(180lb thrust) ,Vex grippers and much more...
The main goal of this design is to help lift a person up; as in from a sitting position from a chair or wheelchair ,turn, then lower the person back down onto another chair (they call this "Transfering" among the nursing community). I got the idea from all the times that either me or an aide/nurse has to lift and move my mom around in her home. I know that there are lift chairs out there than do this, but I want to see if a real robot could be built to do it too.
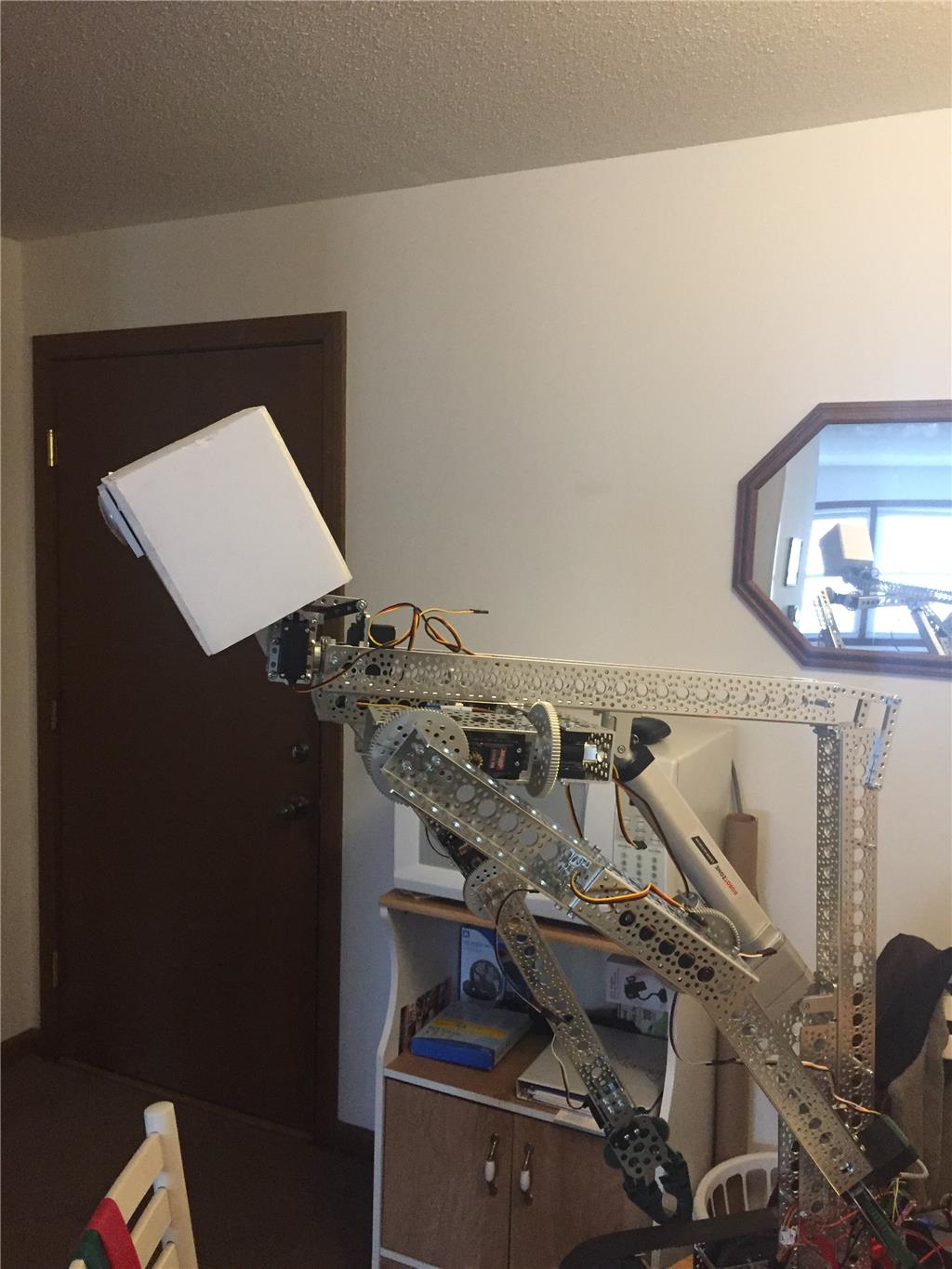
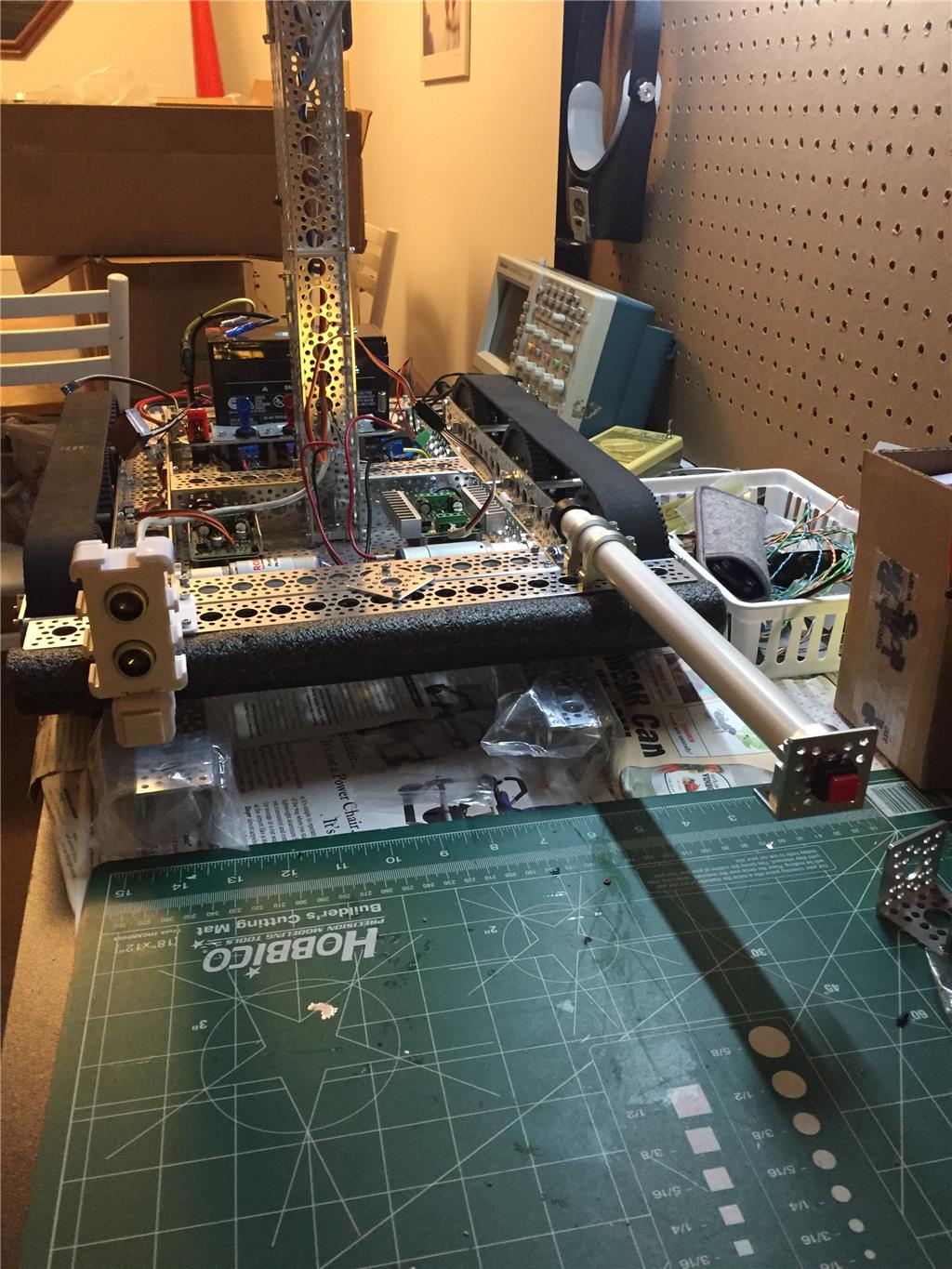
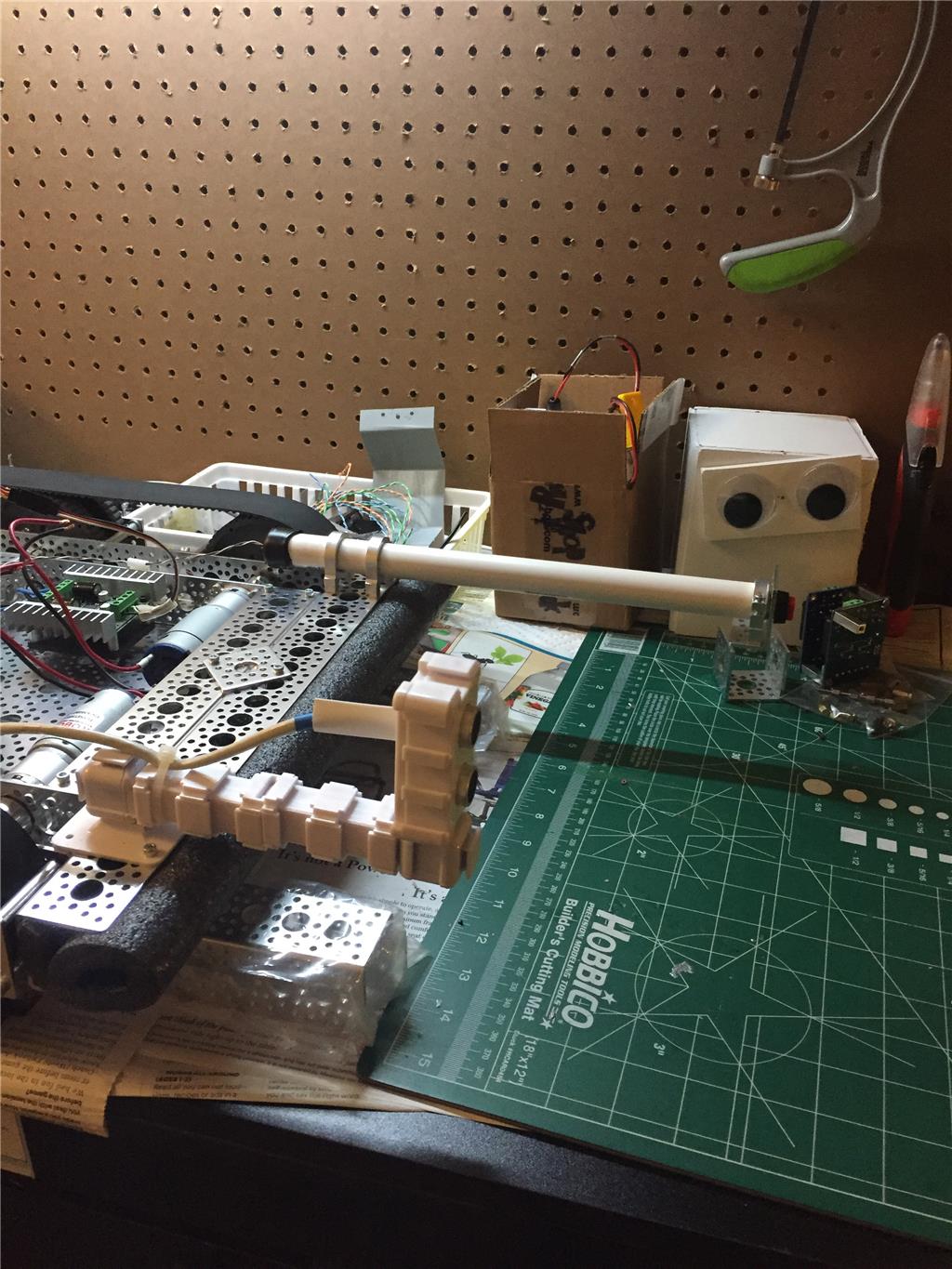
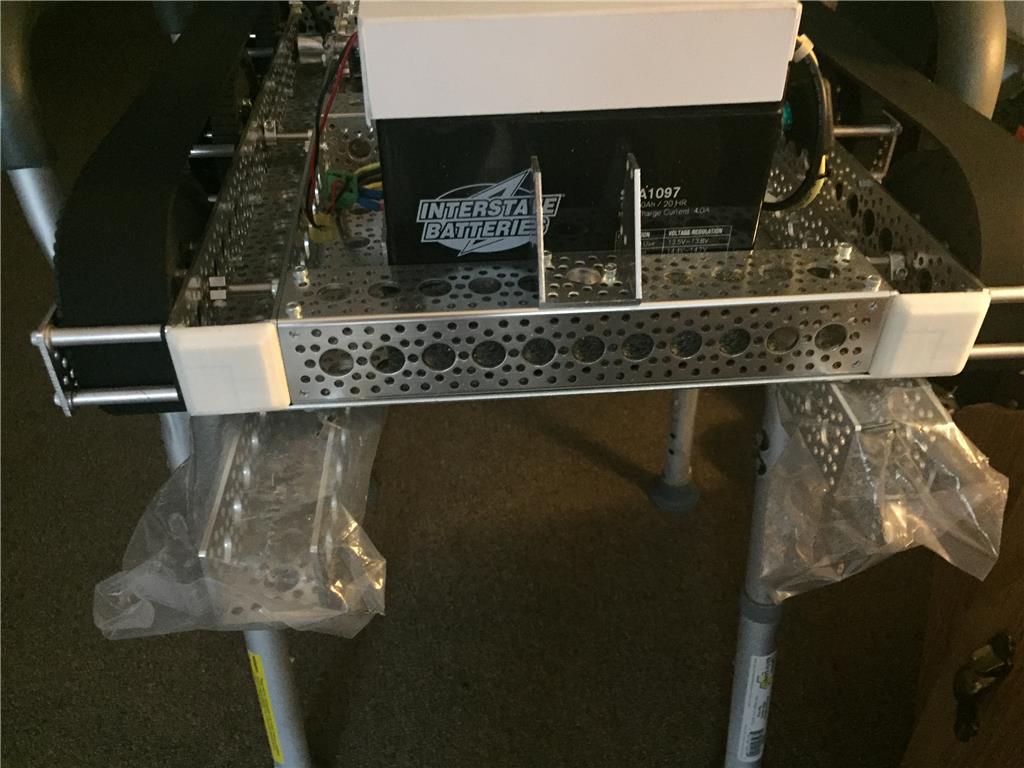
HEMI is currently partly RC controlled right now, but I will be using EZB along the way to perfom the many task that the EZB can do. One thing you will note in this picture is the 2 white pvc tubes protruding outward from the front. these in time will have an Ultrasonic sensor and a bumper switch, and will be used to carefully roll up to the person sitting in a chair (your feet would go in between the white tubes and your toes would touch a large rubber stopper when the robot comes to a stop,holding the feet in place before the lifting. The idea then is that HEMI will bend over forward, while its arms extend outward, safelty grabbing and holding the person, then will rise up till the robot is basicaly fully upright and the person is now in a standing position being held up by the robot. Then to be turned and lowered back down onto another chair ie: wheelchair for an aide/nurse to do whatever is next.

More pics and a couple videos to come as I keep adding to it. Next major hurtle is to add a SSC32, wire the servos and the means to power them.
Discover more robots

Fxrtst's Introducing Alan

DJ's Drd 3D Printable Robot


@EzAng
Yes the SSC32 is the controller from Lynxmotion and communicates via serial to the EZB.
Very cool that you got t he prowler built and ready to go . Its gonna be fun to see it in action
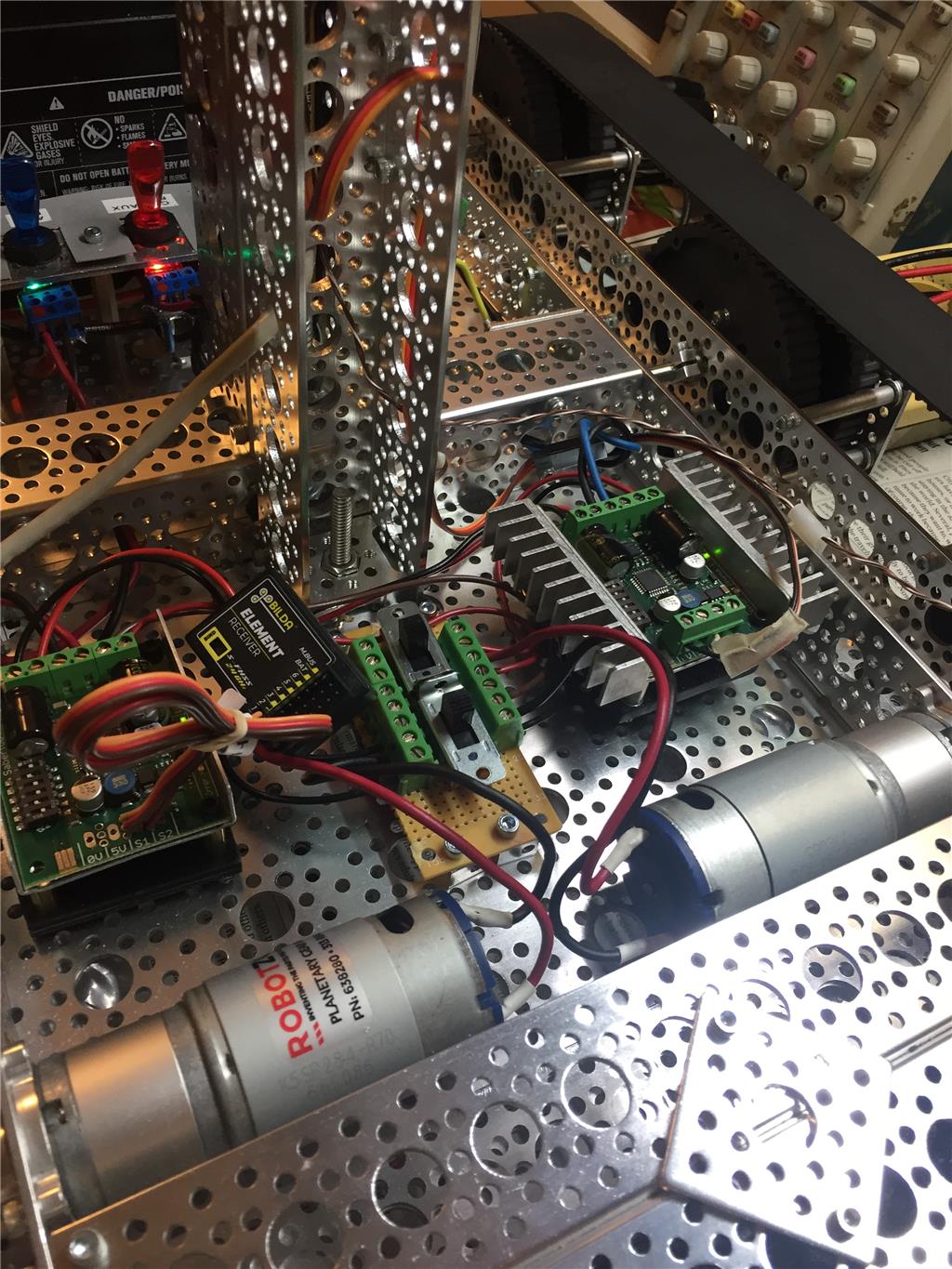
Hi, question, what did you use for your motor controller?
4 motors
EzAng
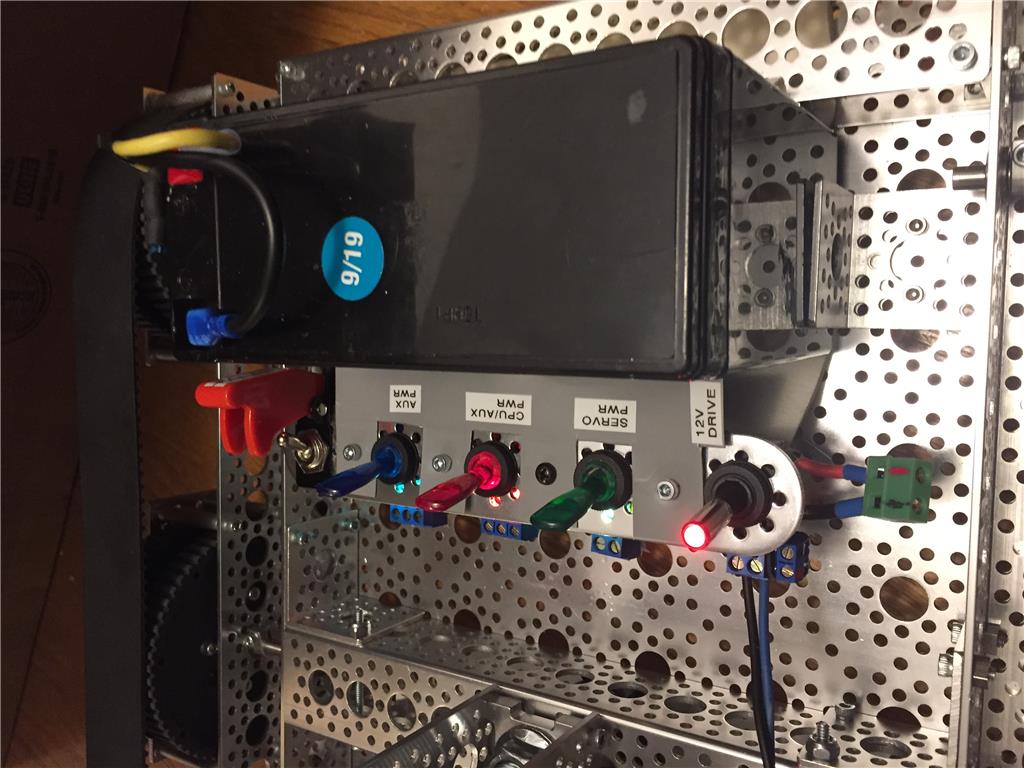
The Agent 390 base only uses two motors. I used a Dimension Engineering 2x12A controller that is controlled via EZB, and the 2x12RC version for R/C control of the base as well. I then am able to switch between the two controllers via a slide switch setup (hard to see in my later photos). I plan on using a relay setup in place of the switches soon.

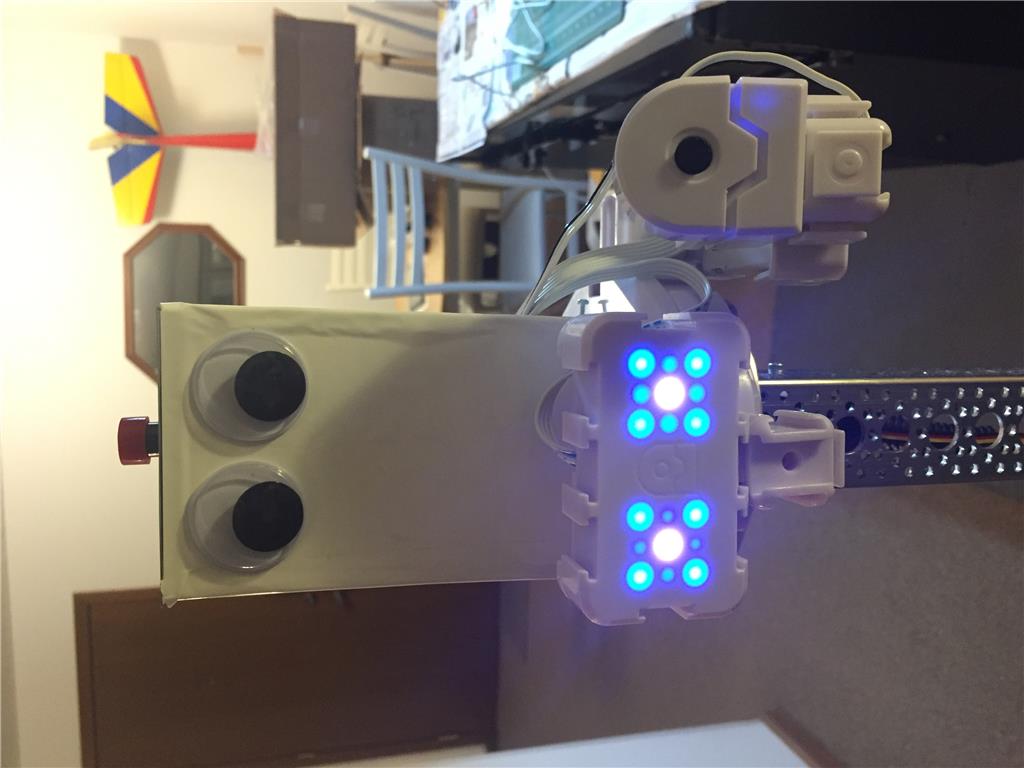
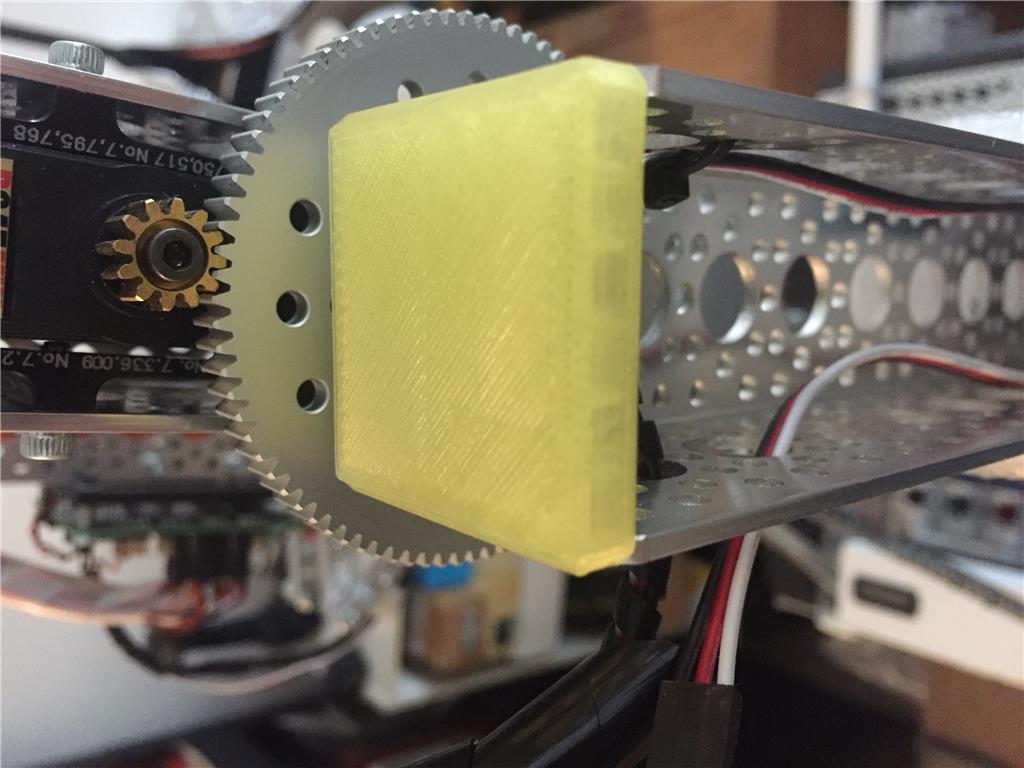
I had to replace the EZB ultrasonic sensor after it was crushed from my lil Terminator like maylay,lol. You will notice I also decided to created a simple protective shied around the sensor.
This view shows how I had reposition thearms at the elbow servos. If you look at previous photos,the arm sections(with grippers) was more inward. I had to make them outward after I realized I needed more outward room. Luckily it was very easy to turn them around.Same message as in my thread:
Wow, this week went fast, back at the country/ farm land again.
Hard to get too robot activities when there is so many other things to do here.
Have a nice, safe 4th of July.
Be hope to back Sunday afternoon
RoboHappy, how are your projects going?
EzAng
Taking a lil break from it as I play around with my new 3D printer. I picked up a large professionall printer from XZY Printing. Already printed a couple add on pieces for Hemi. I willl post soon. I want to get back to the bot, Im still having "turn" issues with the bot. Seems the Sabertooth or the Roboclaw show same issue, I cant get the robot to stop turning left or right when I speak the command, Im still working that out, despite everyone saying it works fine.

the XYZ DaVinci Super 3D printer....I understand, in speech recognition I just use - stop() to stop anything
nice 3d printer, great , send pics when you can.
I have not seriously messed with my 3d printer yet - that is another thing to do
Back in city life, will start this all again I hope.
Be well -
EzAng
RoboHappy, I did not want to hijack your thread, but
Did you read Steve G, Info?
https://synthiam.com/Community/Questions/Sabertooth-2x25-And-Ez-b-V4-Simply-Serial-Connection-4271
give this a try, may help, I don't know, I don't have a sabretooth to play with.
Steve G says:
I have also read that some members had trouble with the 38400 baud rate, and used 9600 baud rate with the fallowing dip switch settings...
Simplified Serial at 9600 Baud Rate.
Switch 1 Up, Switch 2 Down, Switch 3 Up, Switch 4 Down, Switch 5 Up, Switch 6 Up.
Connection initialization script.
Place the following code in the EZ-B "Connection Control" script editor, or "Init" script that connects to the EZ-B connection control.
Code: #Connection INIT command to put motors in a "Stopped" state.
#NOTE: If using 9600 baud rate, edit the following script from "38400" to "9600".
SendSerial(D0,38400,0) - SendSerial(D0, 9600,0)