
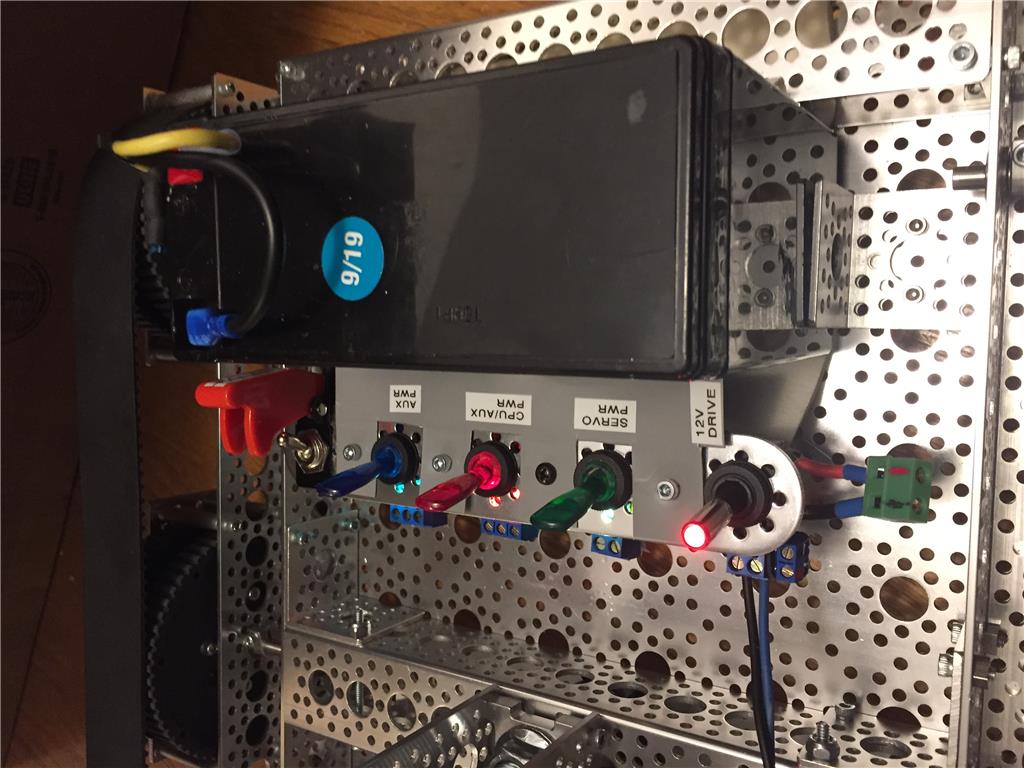










Hi Gang ! So Ive finally got my project to a point to where Id like to show what I have been working on, which I actually started around october of 2019. Its still ways off from being finished, but I wanted to show you the major part of it.
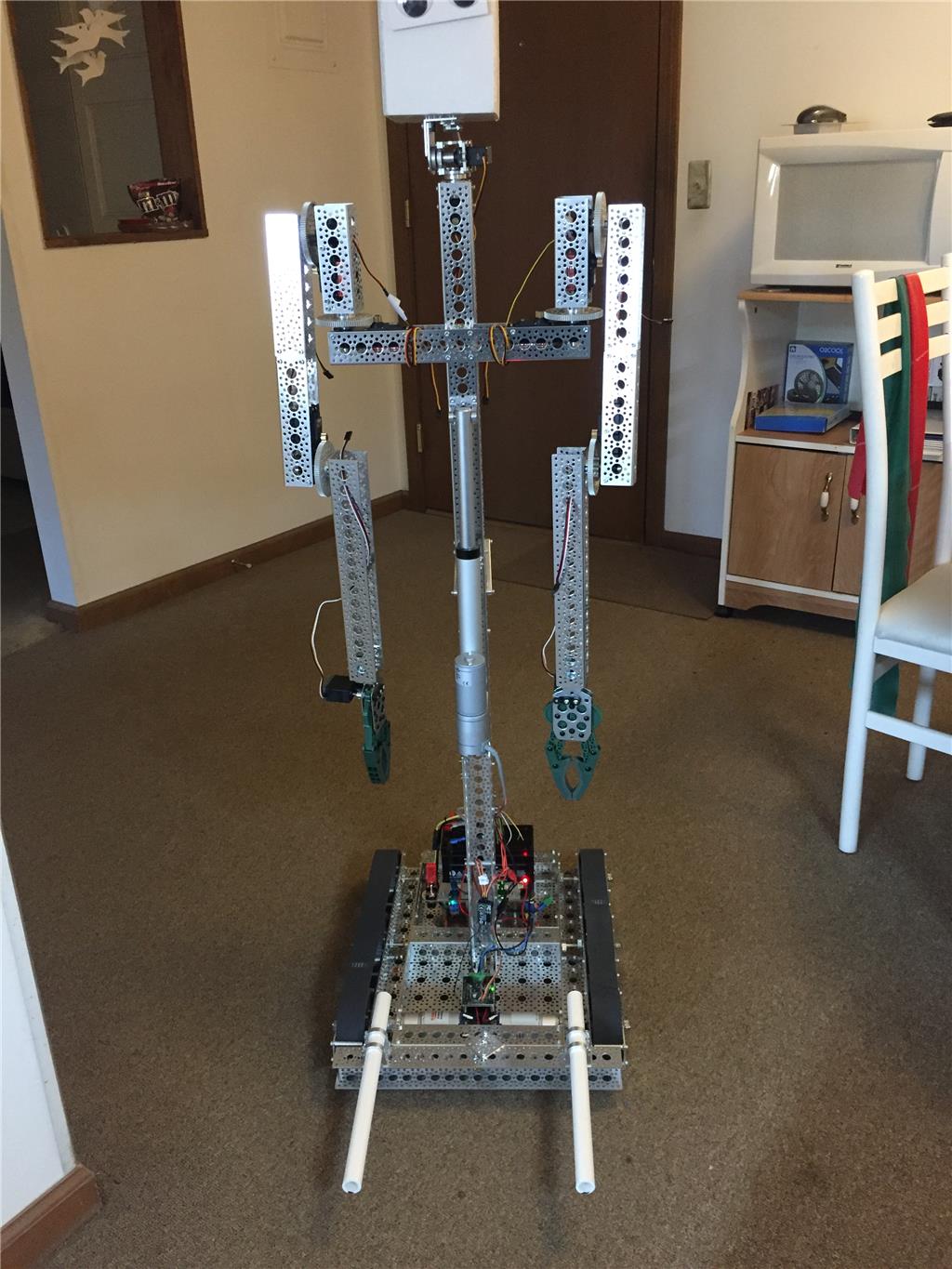
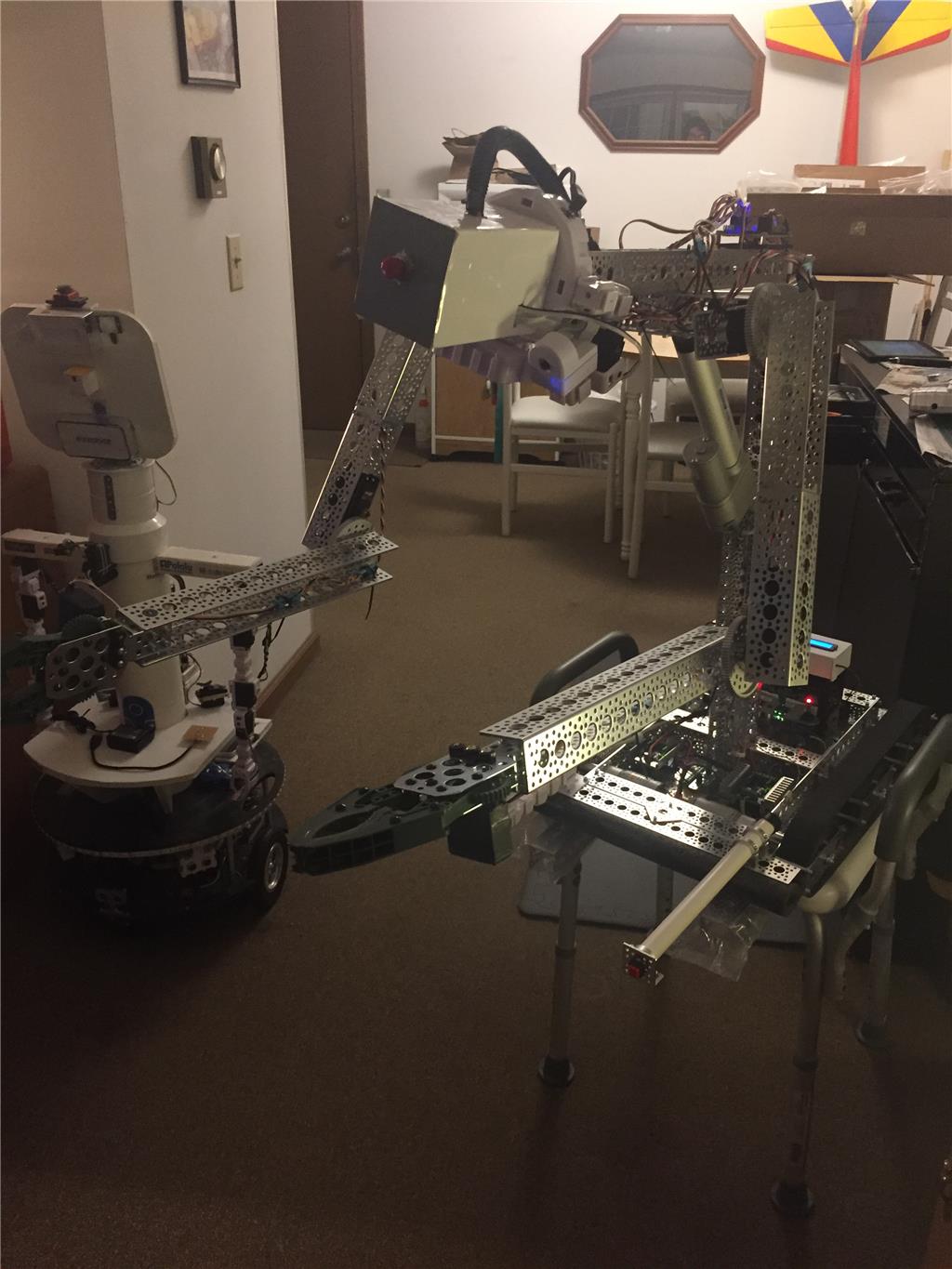
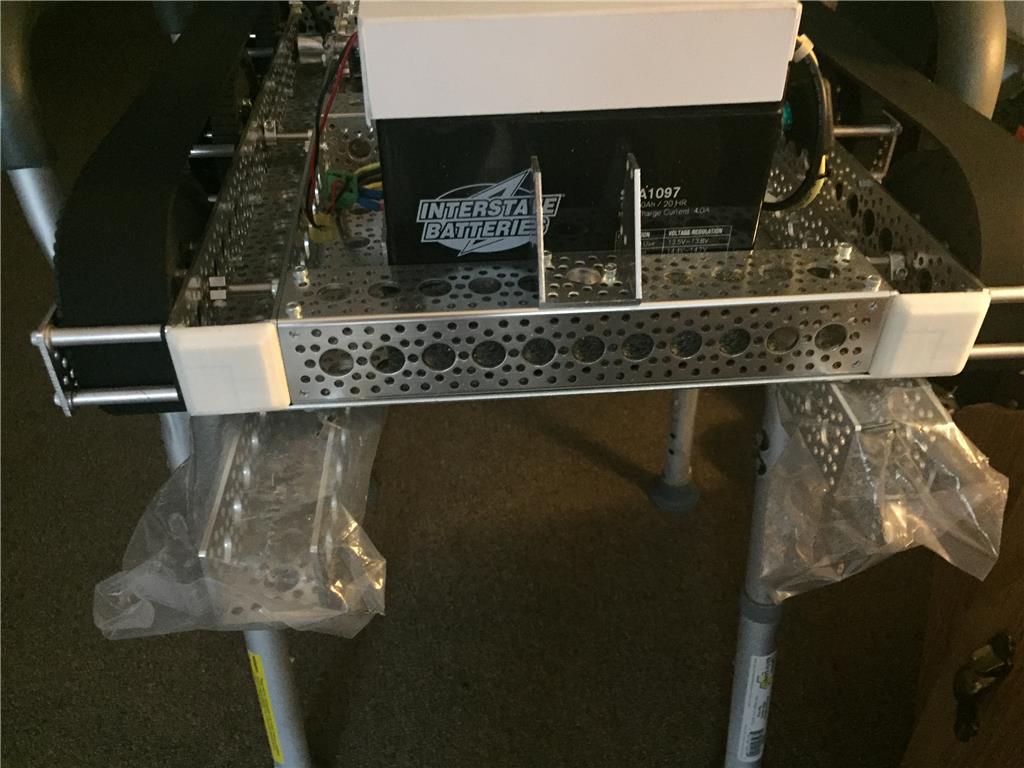
This design stands a lil over 65 inches tall. Currently weighs in about 40lbs. Is mostly made from Servocity Actobotics metal parts and some very high torque servos (3402 oz/in), a torso actuator(180lb thrust) ,Vex grippers and much more...
The main goal of this design is to help lift a person up; as in from a sitting position from a chair or wheelchair ,turn, then lower the person back down onto another chair (they call this "Transfering" among the nursing community). I got the idea from all the times that either me or an aide/nurse has to lift and move my mom around in her home. I know that there are lift chairs out there than do this, but I want to see if a real robot could be built to do it too.
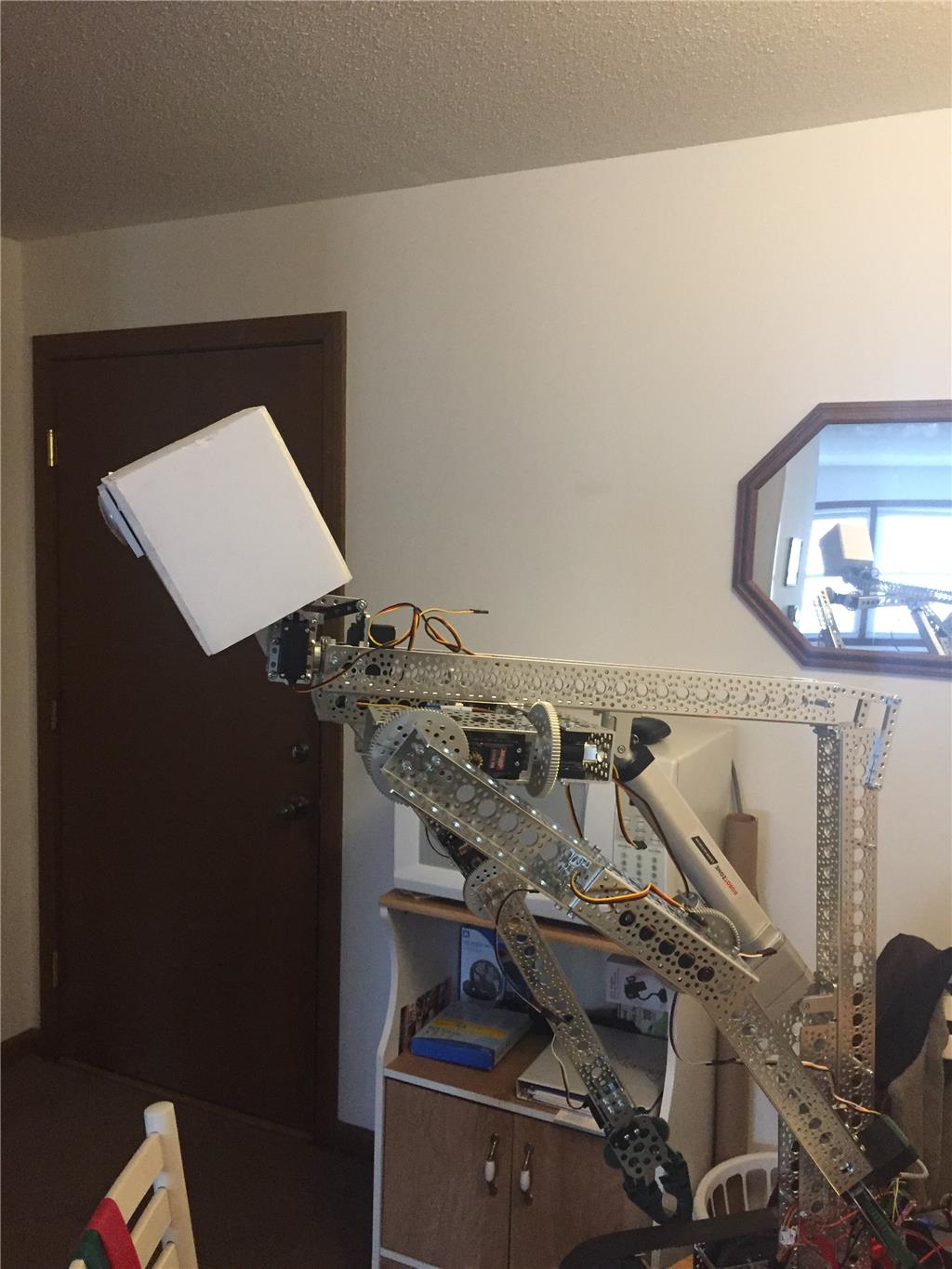
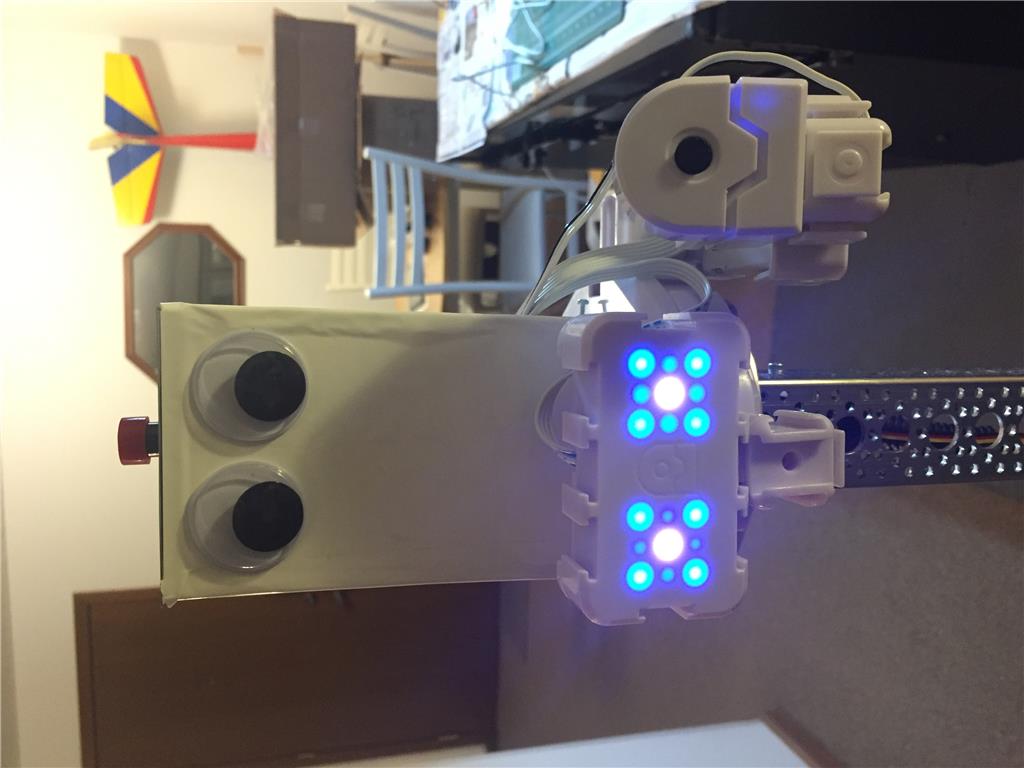
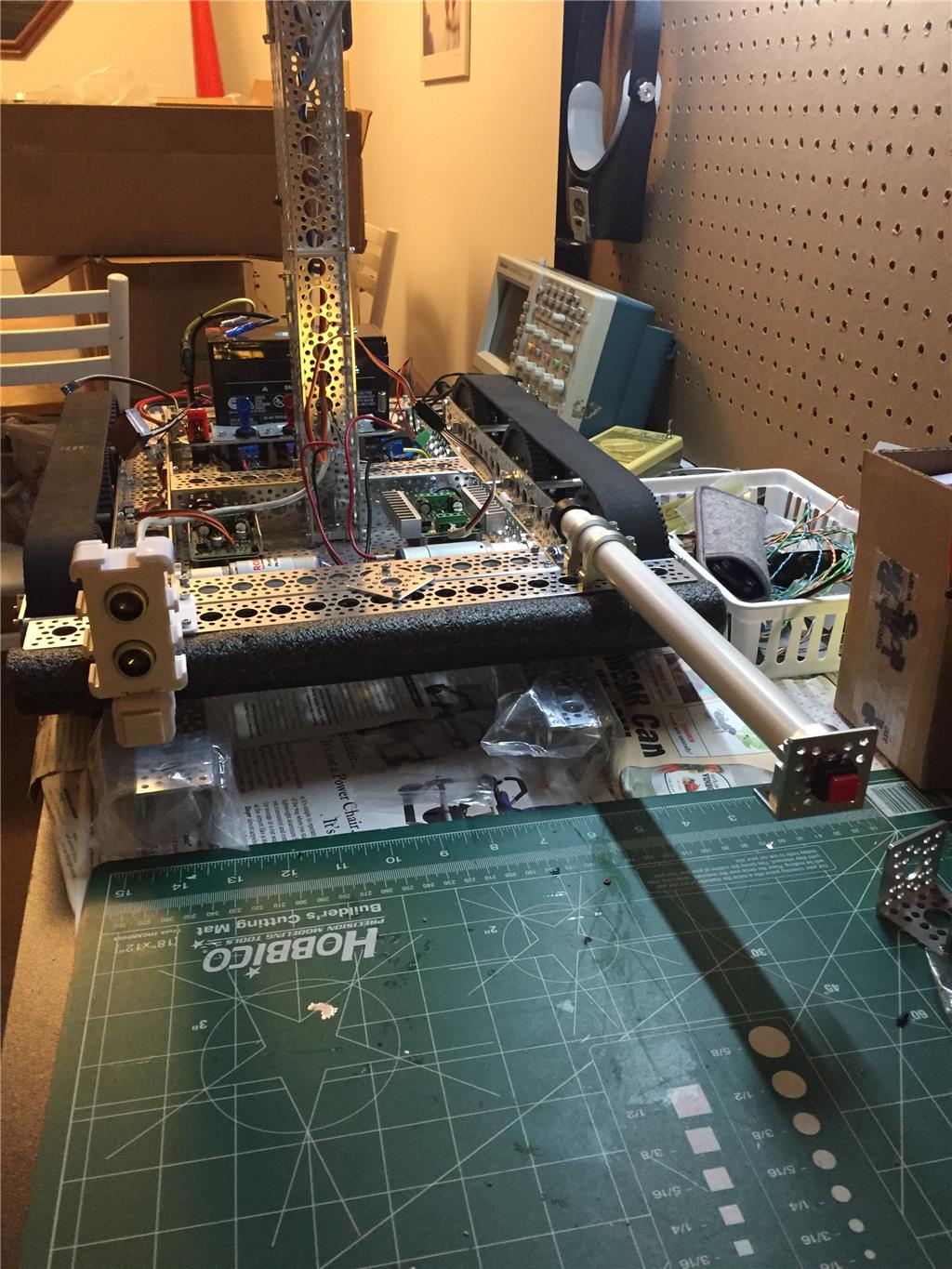
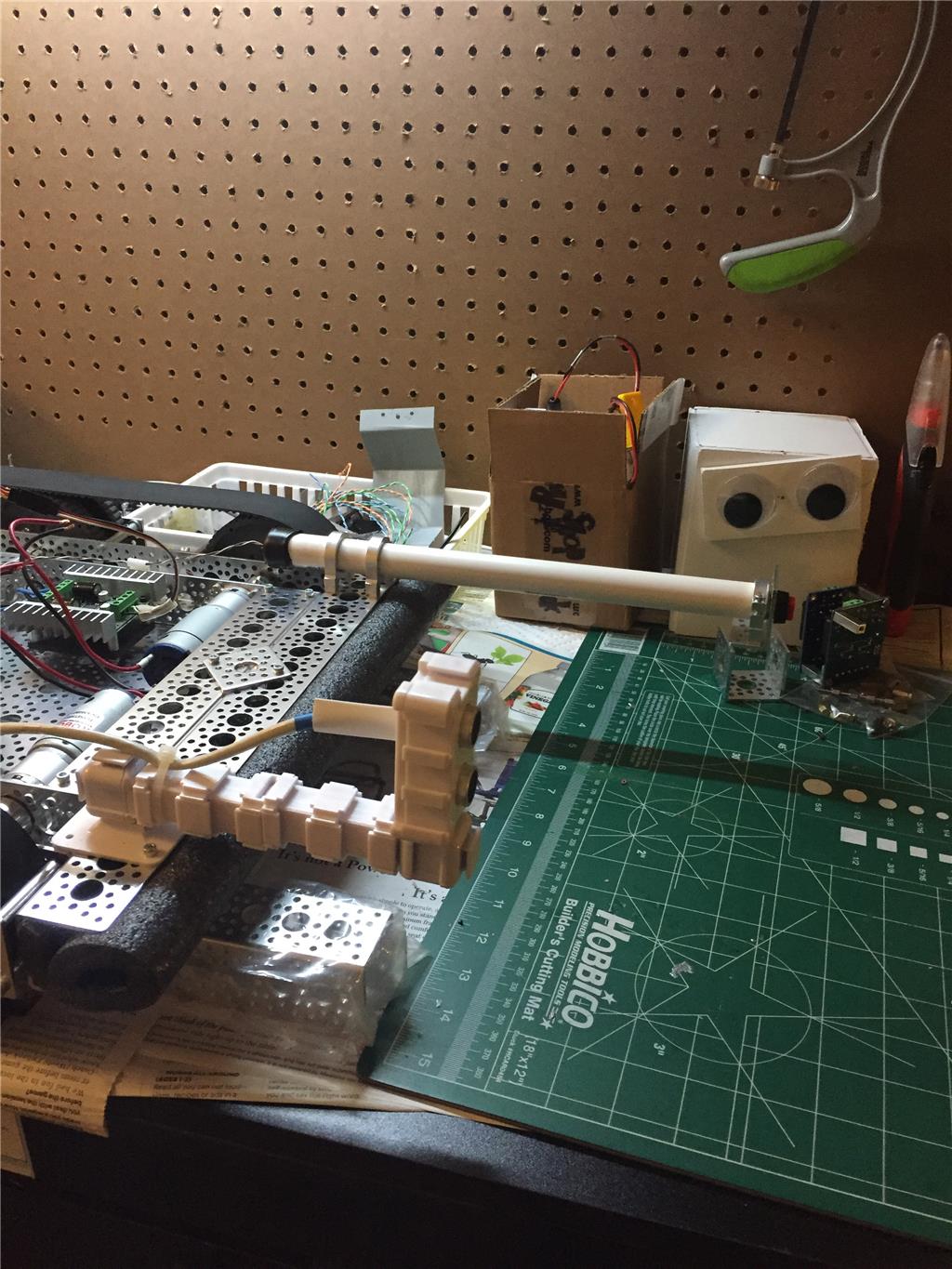
HEMI is currently partly RC controlled right now, but I will be using EZB along the way to perfom the many task that the EZB can do. One thing you will note in this picture is the 2 white pvc tubes protruding outward from the front. these in time will have an Ultrasonic sensor and a bumper switch, and will be used to carefully roll up to the person sitting in a chair (your feet would go in between the white tubes and your toes would touch a large rubber stopper when the robot comes to a stop,holding the feet in place before the lifting. The idea then is that HEMI will bend over forward, while its arms extend outward, safelty grabbing and holding the person, then will rise up till the robot is basicaly fully upright and the person is now in a standing position being held up by the robot. Then to be turned and lowered back down onto another chair ie: wheelchair for an aide/nurse to do whatever is next.

More pics and a couple videos to come as I keep adding to it. Next major hurtle is to add a SSC32, wire the servos and the means to power them.
Discover more robots
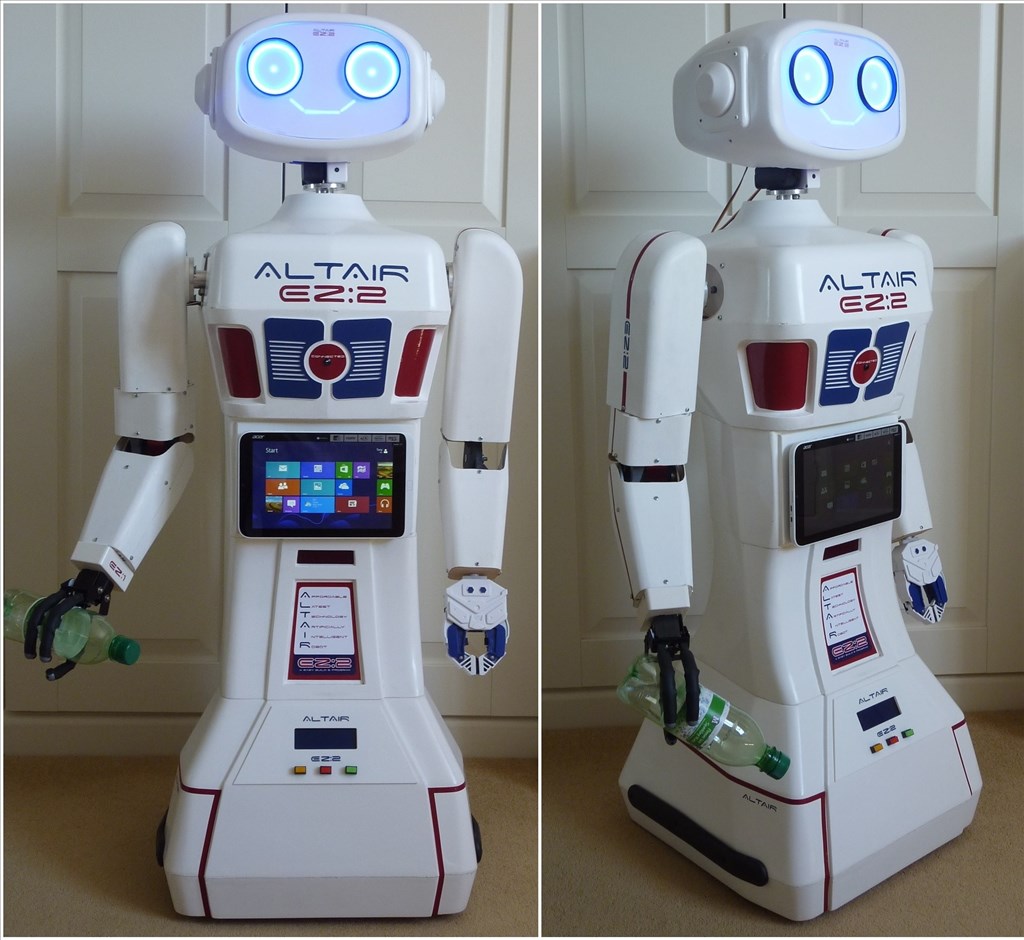
Toymaker's Introducing The Altair Ez:2 Robot
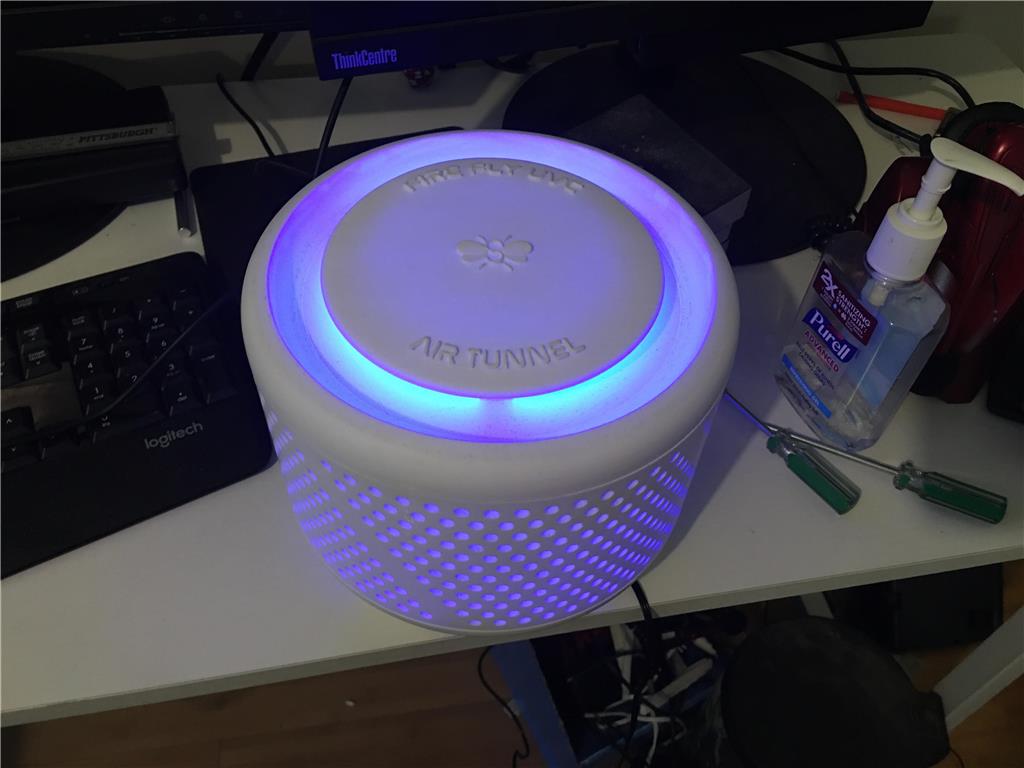
Jstarne1's Air Tunnel Plus Bot The Smartest Way To Kills...


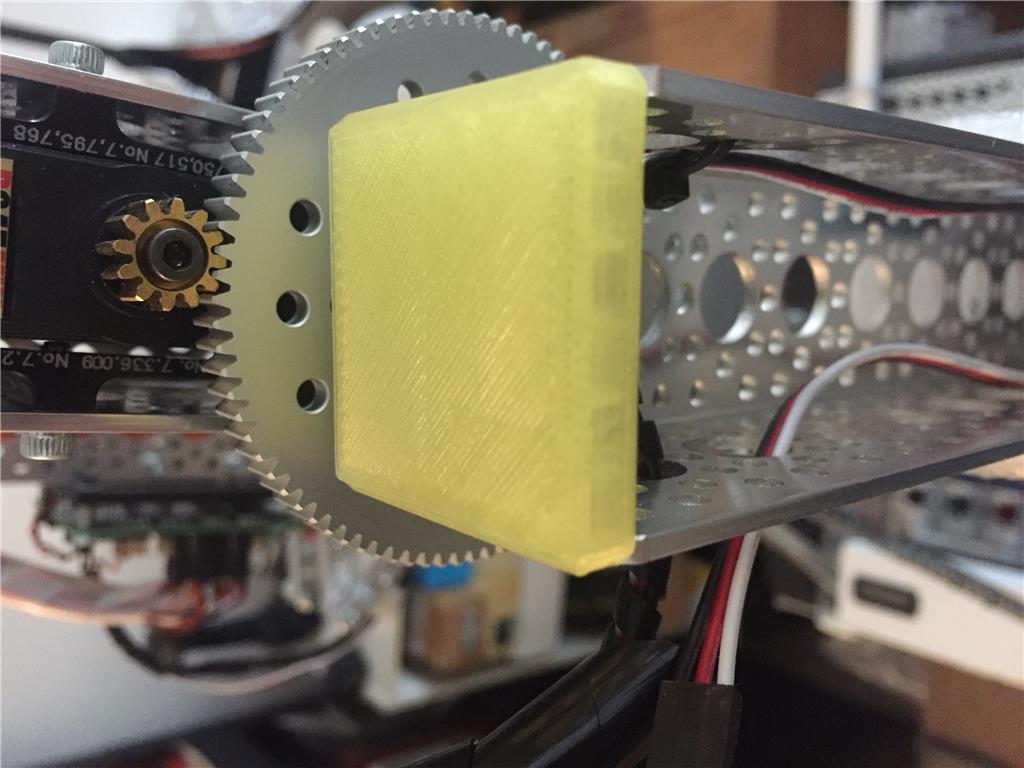
I still very new at 3d printing, maybe in a week or two I will get back into that.
Your Cybot looks cool there :-)
I have relatives coming to town, great to see them but all the projects stop. :-(
talk again soon,
be well RoboHappy,
EzAng
Another video on how the torso will work https://youtu.be/_c60sgN8RNQ
wow, like an InMoov
had to watch a few times
can you make a longer video, up and down?
what kind of actuator is that?
EzAng
The Linear Actuator is another Servocity product. They have light,heavy and super duty versions. They come in different thrust pulls and stroke lengths. The one I use is a heavy duty, 10" stroke, 180lb thrust capacity.Ran me about $130.
Just adding another view of the robots Torso movement. Still have to get the arms to move proper. https://youtu.be/uiB_2Iz_GRQ
The Linear Actuator works great for up and down movements of a body - Torso movement.
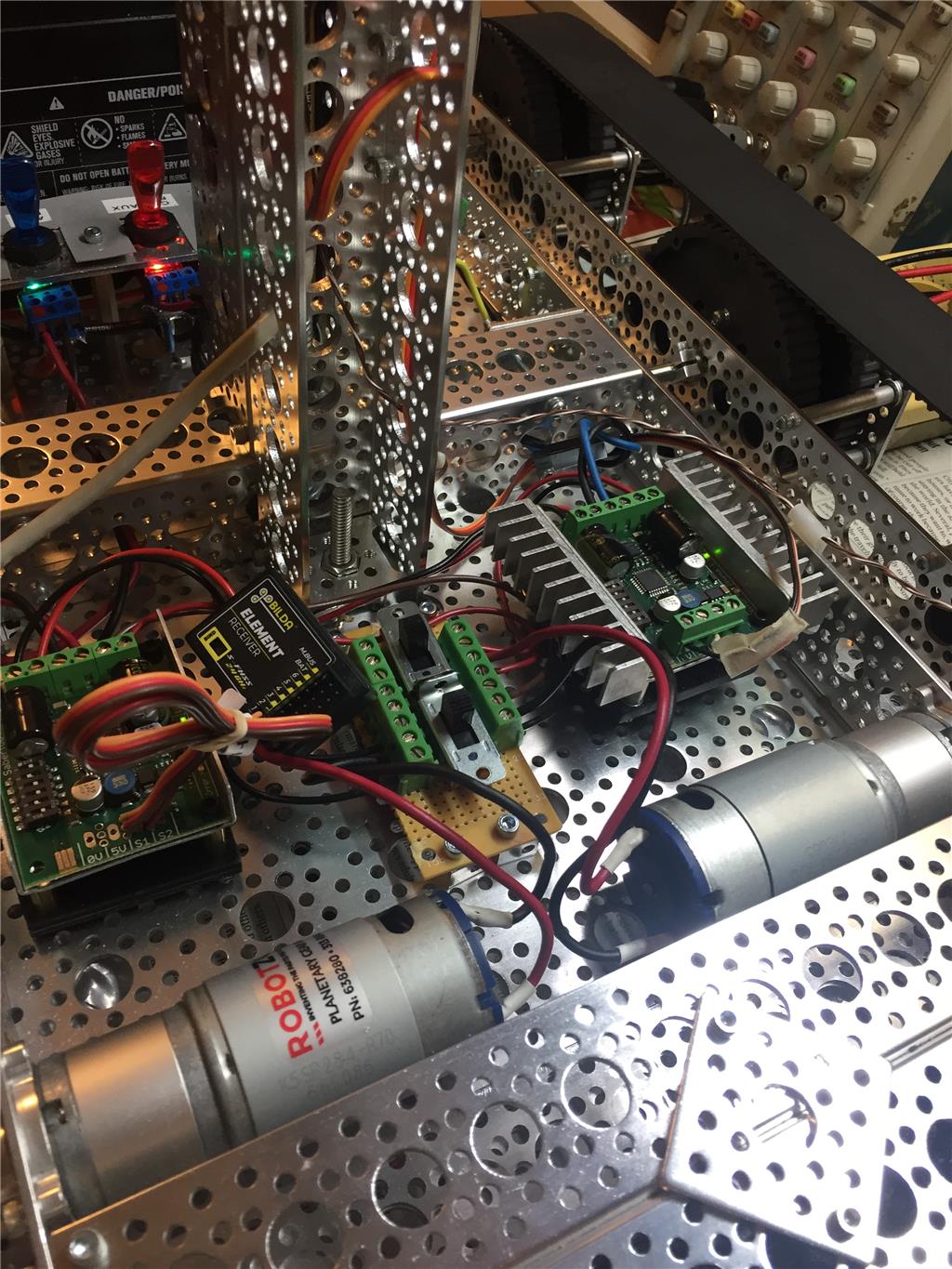
I had to use 2 controls for each for the arms to move properly
Look at the right - 2 controls for each
min. and max - vertical servo control 72 and 97
forward and reverse - continuous servo control this is a good control. it has a "stop" function 50 and 37

The arms all wired up....
Evey All wired up to the SSC32 . Some day I can give Hemi a nice covering.Your robot is "Looking good", send videos when you can, thanks...
Refresh my memory, what is the SSC32 ? is it the SSC-32 servo Controller ?
By the way, I put the Prowler Robot Kit together in the midst of my relatives, lol.
By Wednesday I should be able to power the Prowler Robot Kit up for a test.
EzAng