



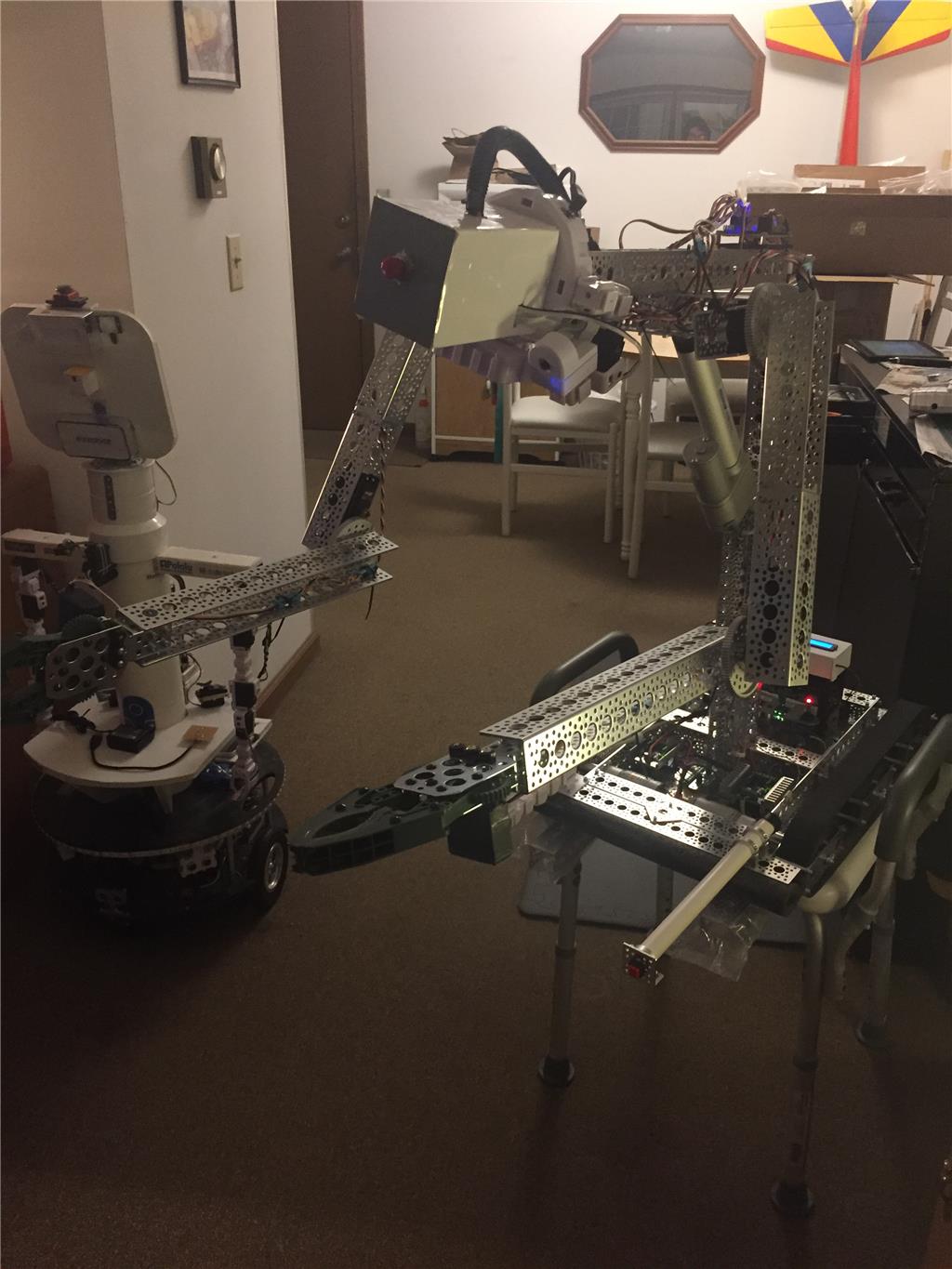







Hi Gang ! So Ive finally got my project to a point to where Id like to show what I have been working on, which I actually started around october of 2019. Its still ways off from being finished, but I wanted to show you the major part of it.
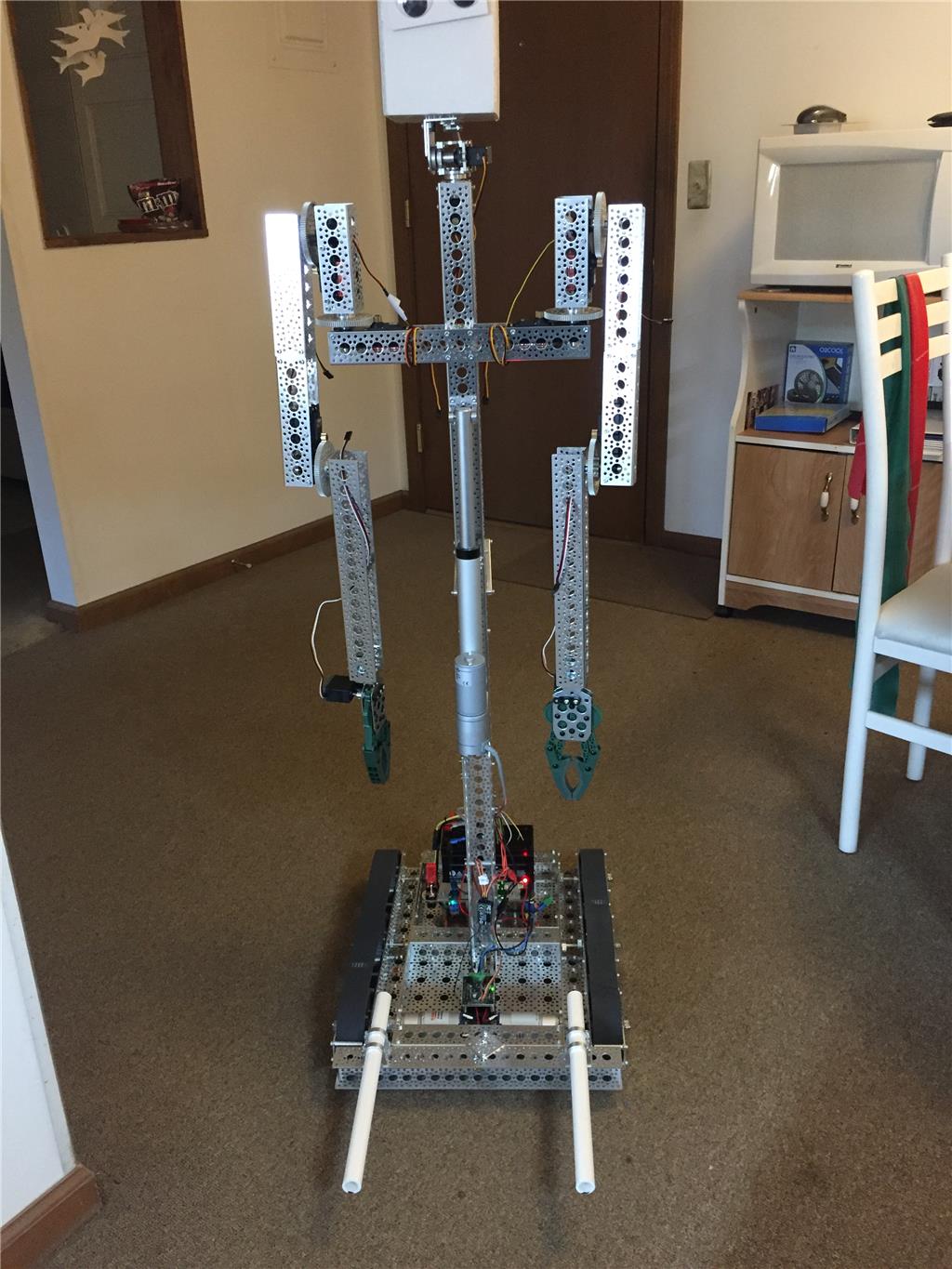
This design stands a lil over 65 inches tall. Currently weighs in about 40lbs. Is mostly made from Servocity Actobotics metal parts and some very high torque servos (3402 oz/in), a torso actuator(180lb thrust) ,Vex grippers and much more...
The main goal of this design is to help lift a person up; as in from a sitting position from a chair or wheelchair ,turn, then lower the person back down onto another chair (they call this "Transfering" among the nursing community). I got the idea from all the times that either me or an aide/nurse has to lift and move my mom around in her home. I know that there are lift chairs out there than do this, but I want to see if a real robot could be built to do it too.
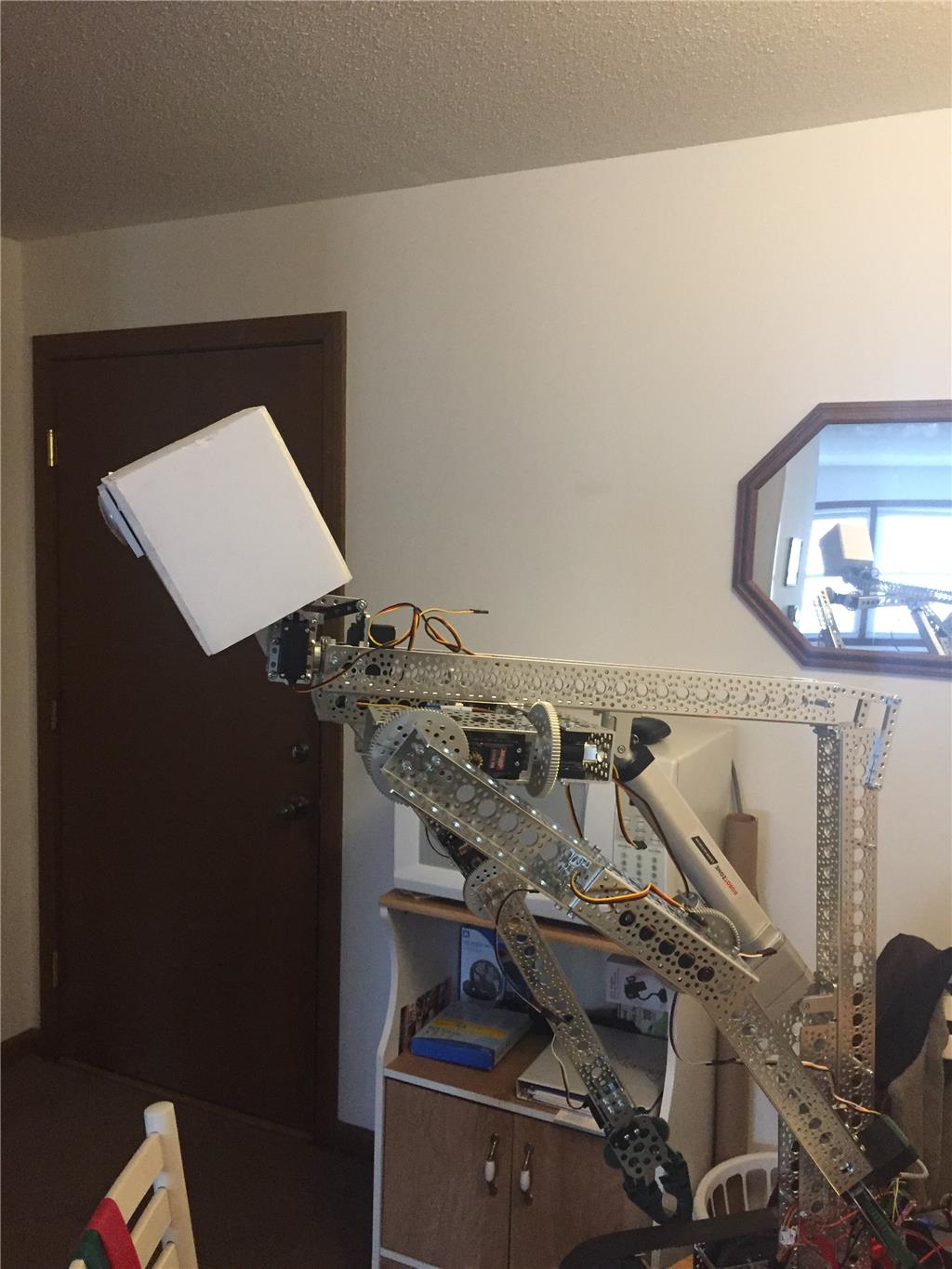
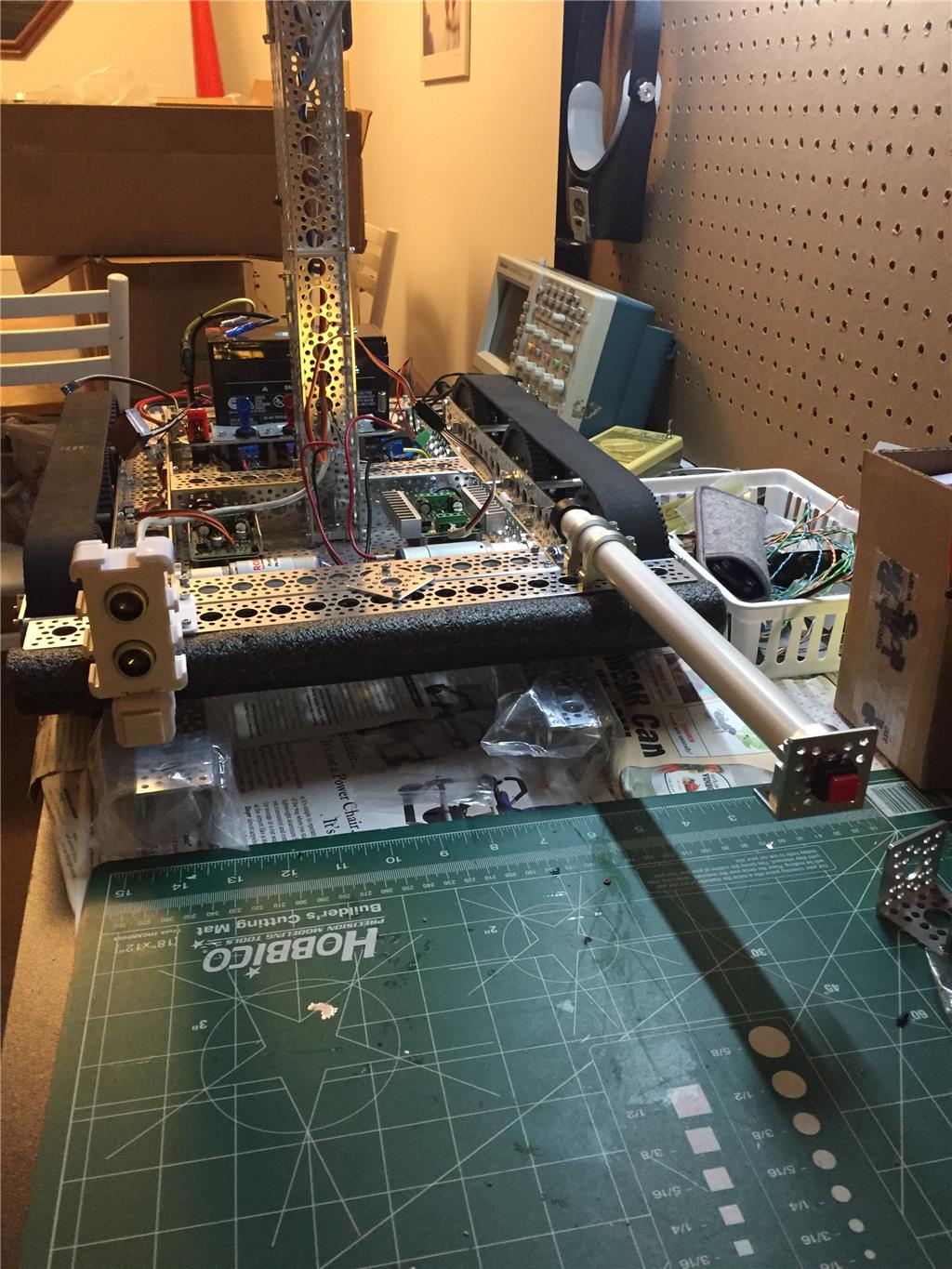
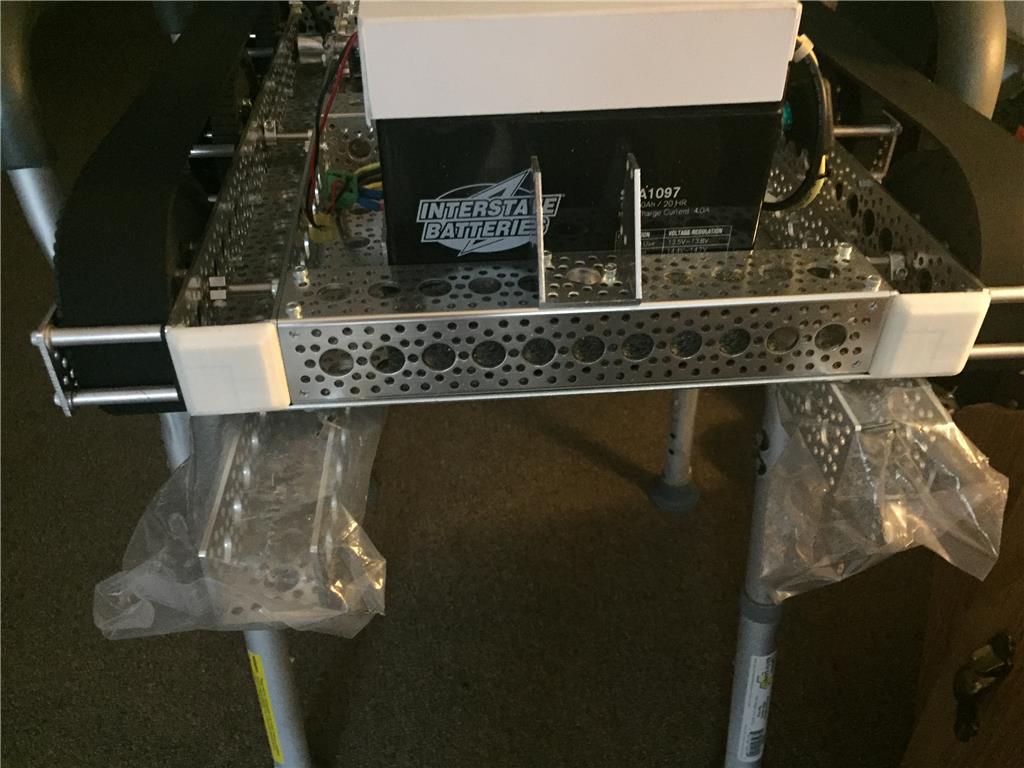
HEMI is currently partly RC controlled right now, but I will be using EZB along the way to perfom the many task that the EZB can do. One thing you will note in this picture is the 2 white pvc tubes protruding outward from the front. these in time will have an Ultrasonic sensor and a bumper switch, and will be used to carefully roll up to the person sitting in a chair (your feet would go in between the white tubes and your toes would touch a large rubber stopper when the robot comes to a stop,holding the feet in place before the lifting. The idea then is that HEMI will bend over forward, while its arms extend outward, safelty grabbing and holding the person, then will rise up till the robot is basicaly fully upright and the person is now in a standing position being held up by the robot. Then to be turned and lowered back down onto another chair ie: wheelchair for an aide/nurse to do whatever is next.

More pics and a couple videos to come as I keep adding to it. Next major hurtle is to add a SSC32, wire the servos and the means to power them.
Discover more robots

Ezang's My New And Improved Talk Servo
Marv's 4Wd Project


What drive motors are you using? Do they move that much weight easily? Thanks
The drive motors were part of a kit from Servocity. Can look up Agent390 on their site . The motors are 313rpm , and the kit can move up to 50 lbs, which I am sure I am getting close to now. :)I've seen a video of the drive system carrying a large bottle of water, or pushing a person along while sitting ina office chair. The robot moves right along , fast, when using an r/c controller. Just don't stop sudden, it tends to wanna rock a lil bit,but is fine when going around slower.

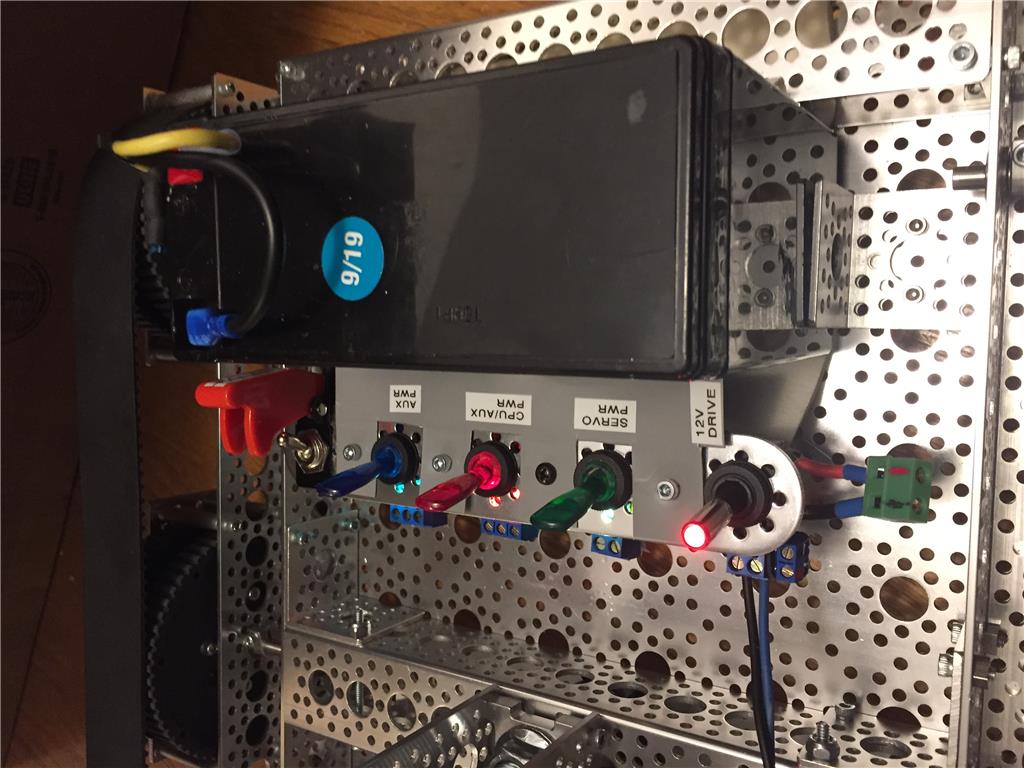
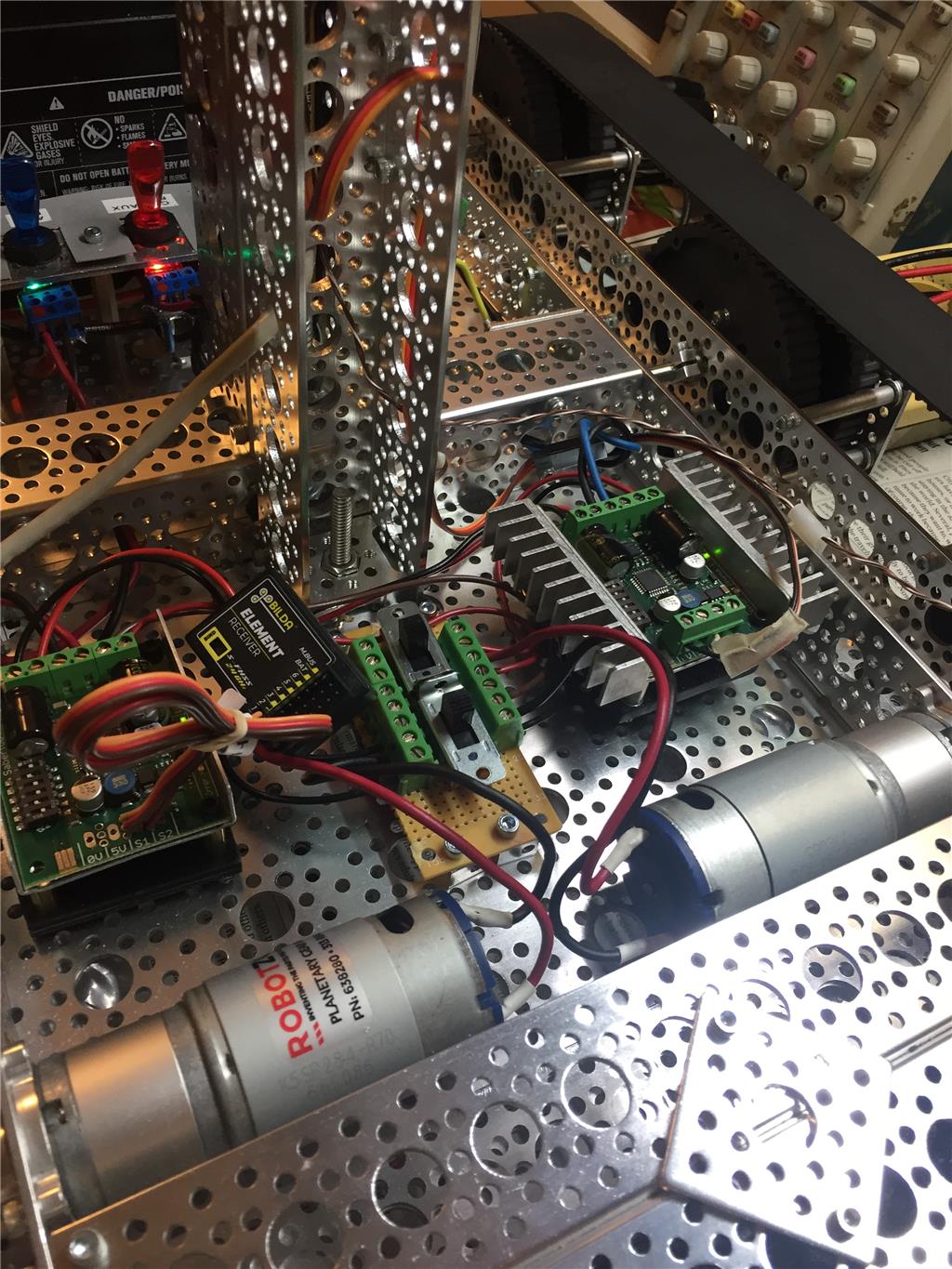
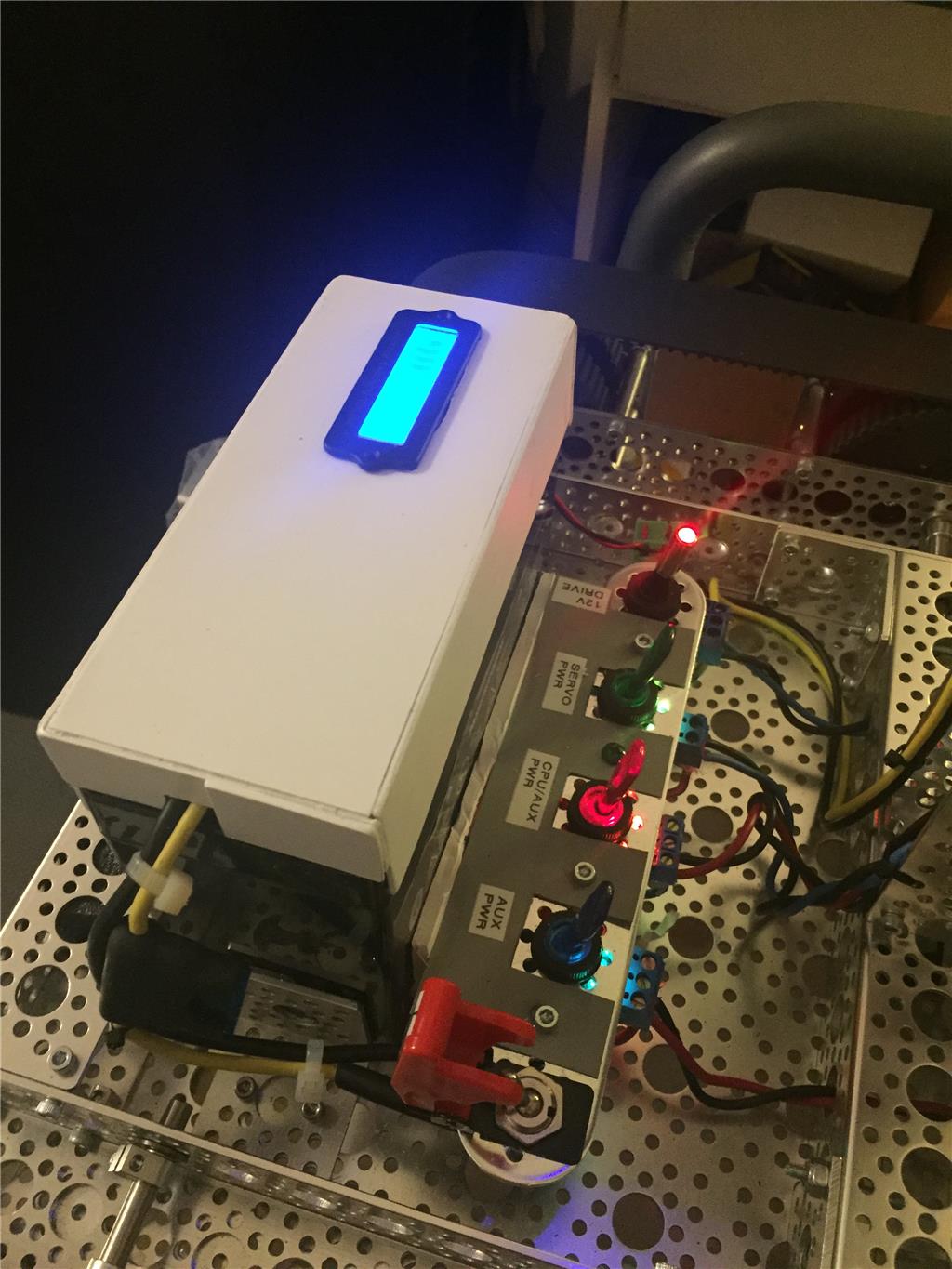
A close up of the power panel. Was just the drive system wired up so far.
These are some serious servoswhat are the parts from servo City you have here in this robot?
EzAng
@EzAng The structure is made from Servocitys Actobotics line. The material is Aluminum and is made to accept 6-32 hadware. All Servos in the arm are high torque custom design by Servocity and are each capable of over 3400oz of torque. The grippers are from VEX. Im using Sabertooth 2x15 motor controller and a SSC32 servo contoller. I have made a couple changes to the drive base and head, I will post some pics shortly.
Good morning RoboHappy, thanks for responding,
More pictures will be nice
I noticed the arms move up and down, you put some round pieces there, that hold it to the body, what are they called?
Are they Actobotics Round Mount Bases?
I will look at servo city's site today, thanks
By the way, if you are looking for a 3d printer, I just ordered again on Amazon the Creality 3D Printer CR-10S Pro V2 with BL Touch Auto-Level, Touch Screen, Large Build Volume 3D Printer 300mmx300mmx400mm with Capricorn PTFE 2019 Newest 95% Pre-Assembled Printer
EzAng
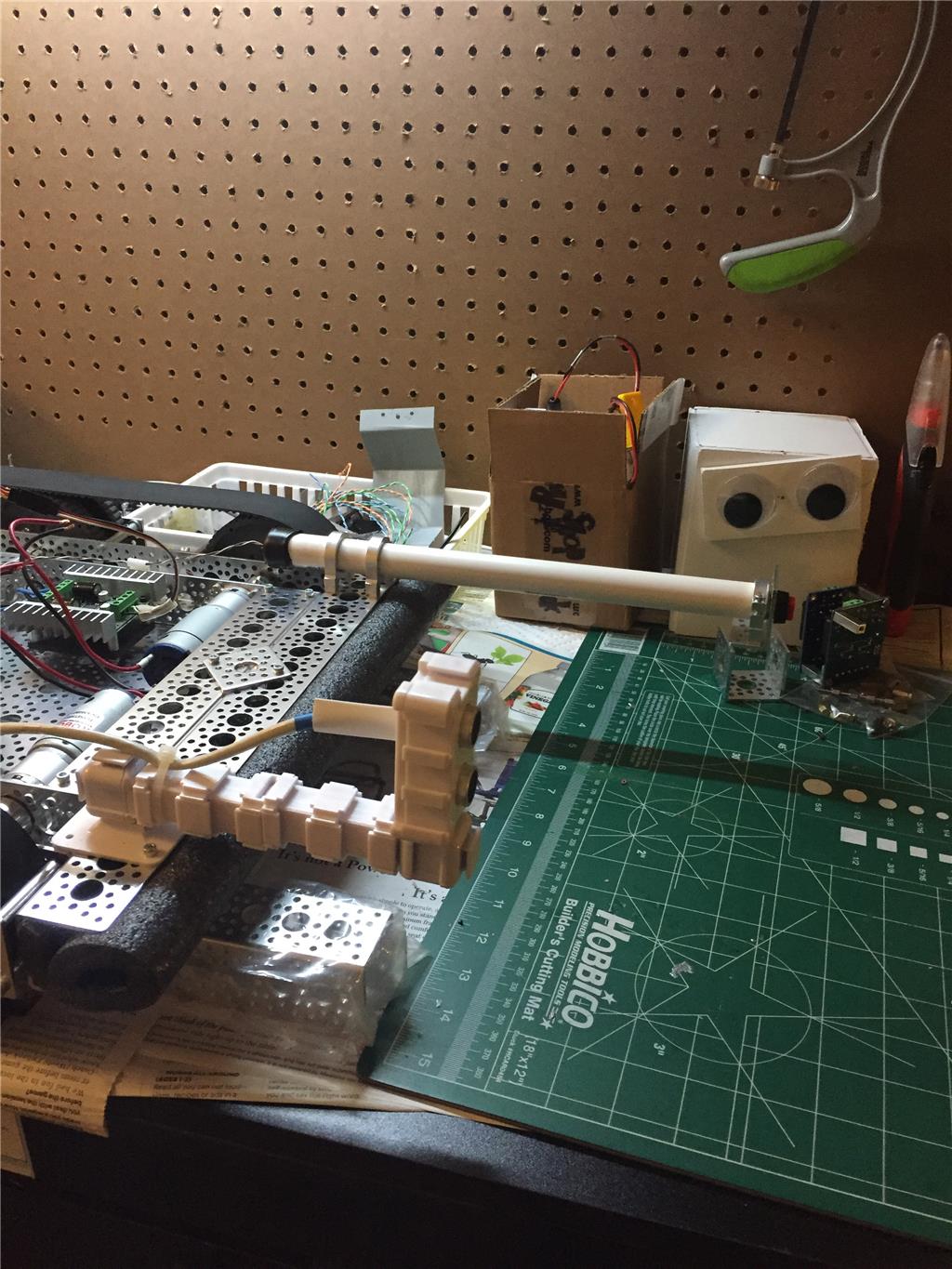
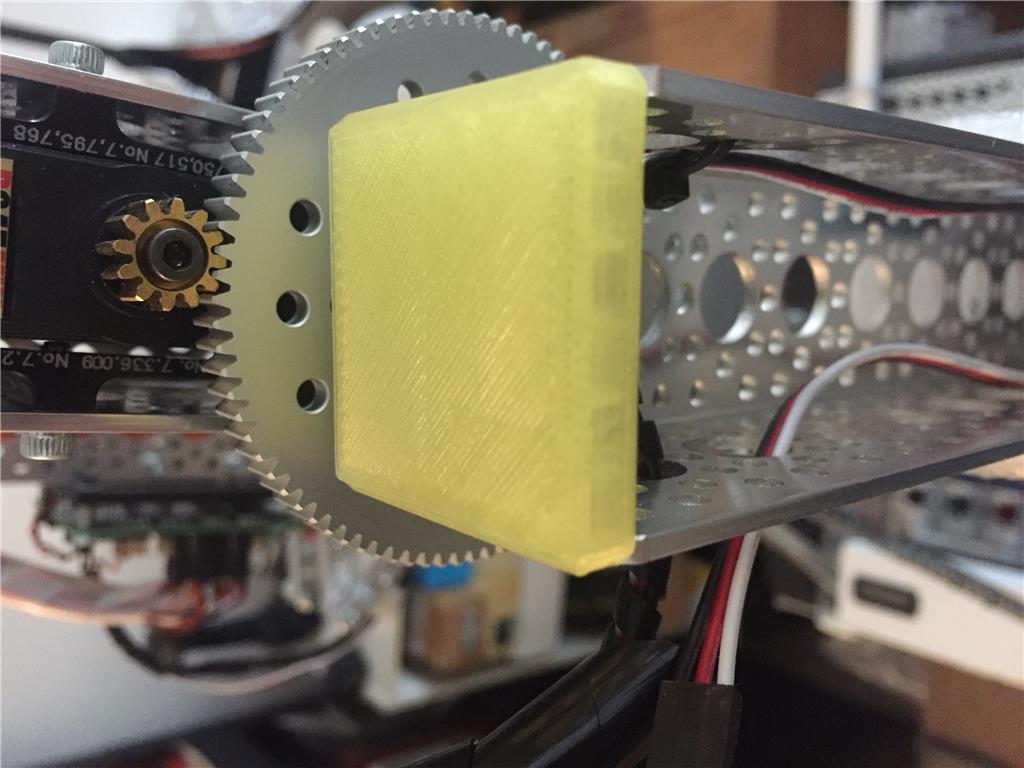
@EzAng Thanks for the printer info.. that one has become rather recommended all over I notice. On the arms, those large round disk are actually large gears built into the servo structure itself from servocity, and yeah, these servos really can hold some serious weight and still draws minimal current. You will also notice the large linear pistion on its body, thats capable of 180lb lift.

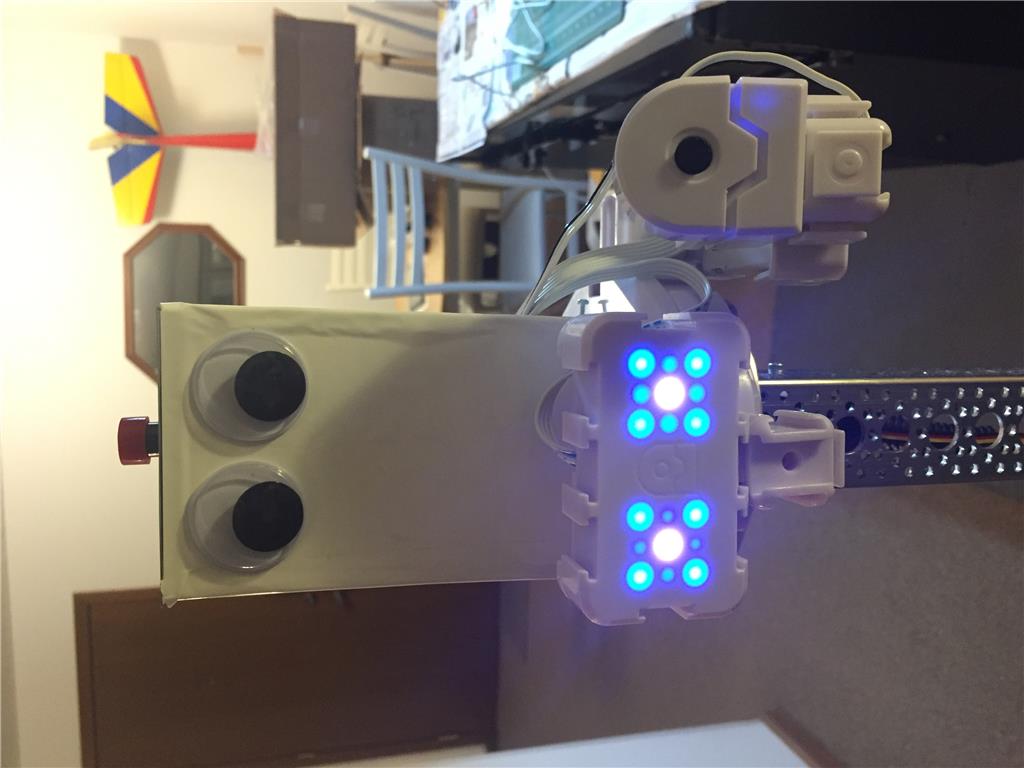
Hemis New Head....The EZB V.4 is inside, sitting on the base of a "six" base with a servo under it for neck turning. As you can see I added the camera and RGB module. On top is an "emergency stop" button.