









































-636343637196289983.jpg)
-636343637315278038.jpg)







































-635683694093497265.jpg)


Edit: Kickstarter campaign failed in 2015.
Starting in 2026 you can build an interactive Alan by joining my Robotics Courseware Mecha Morphix (links coming soon). You can follow along with detailed video instructions starting with 3d printing parts. Off the shelf hardware components links are included with the BOM. Don't miss out! Be sure to get a head in robotics. Build at you own pace. Coming soon.
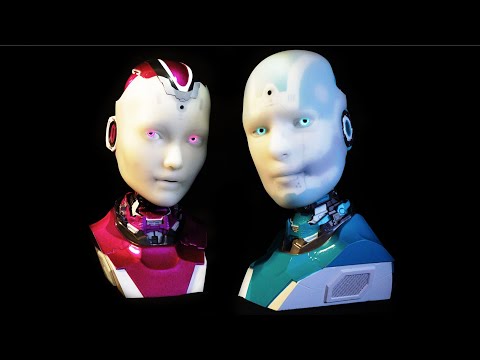
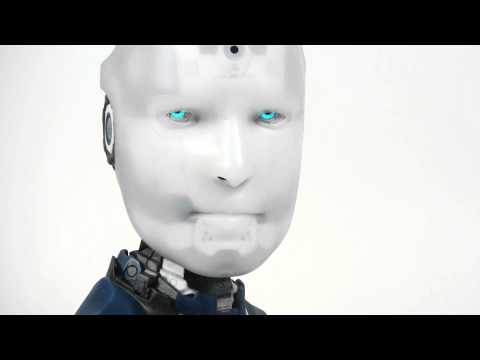
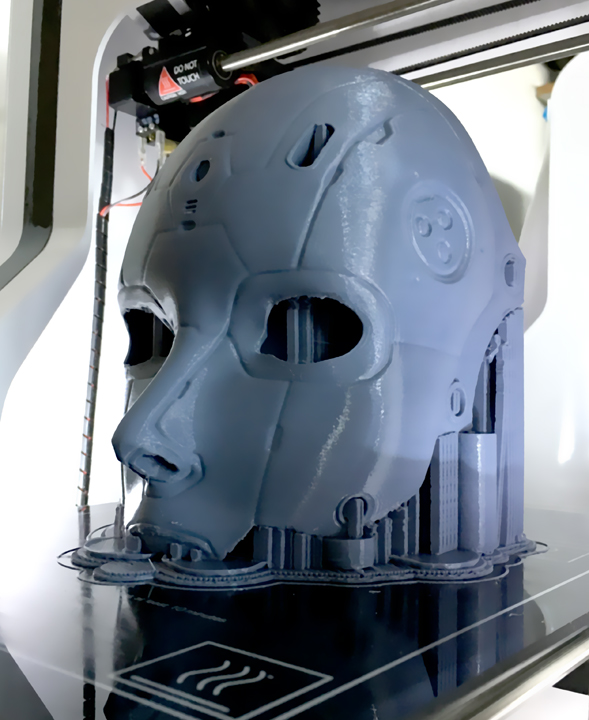
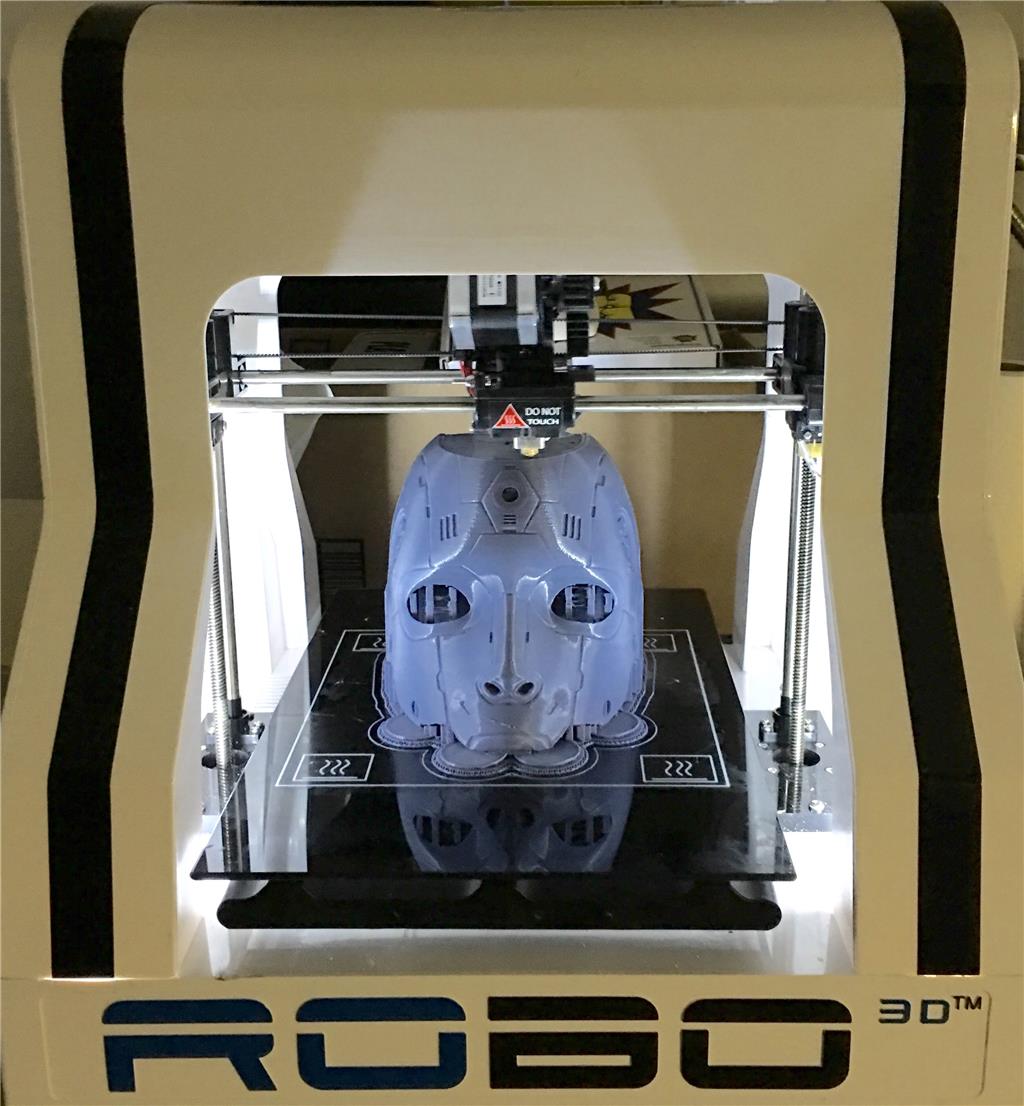
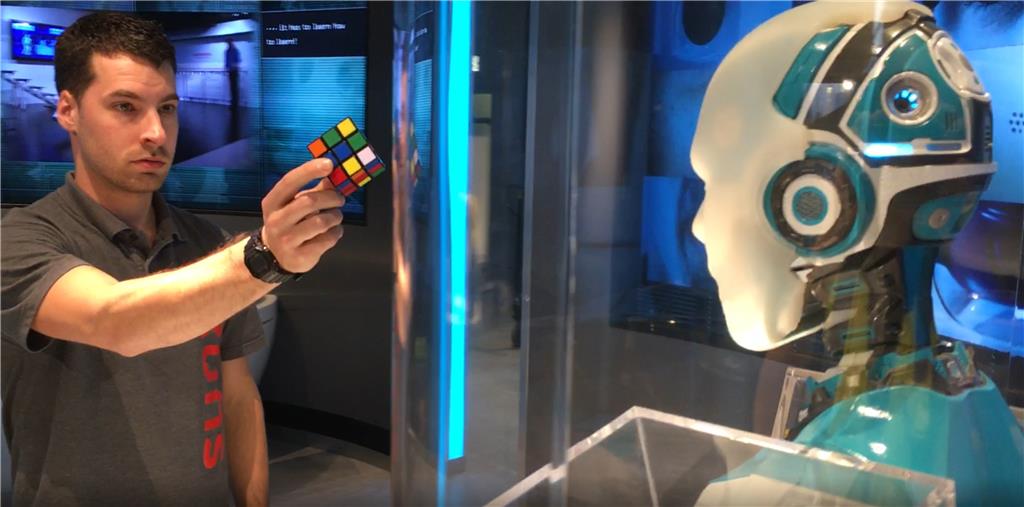
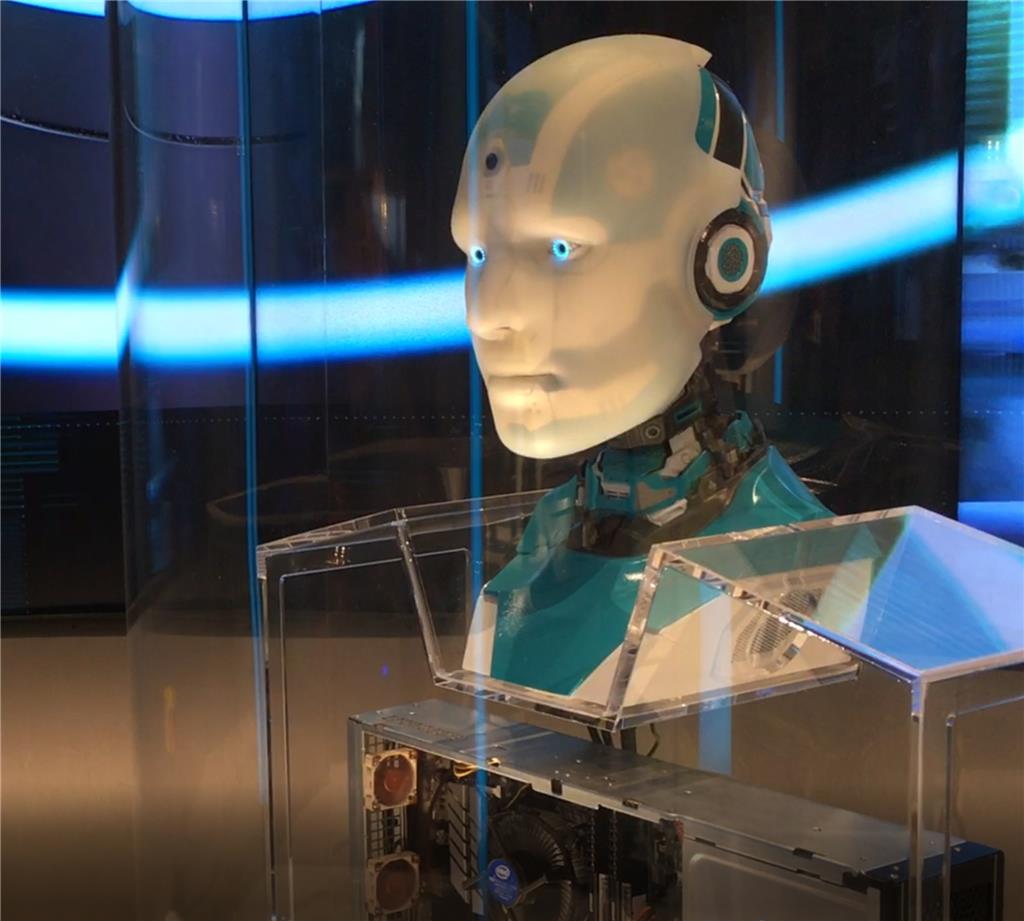
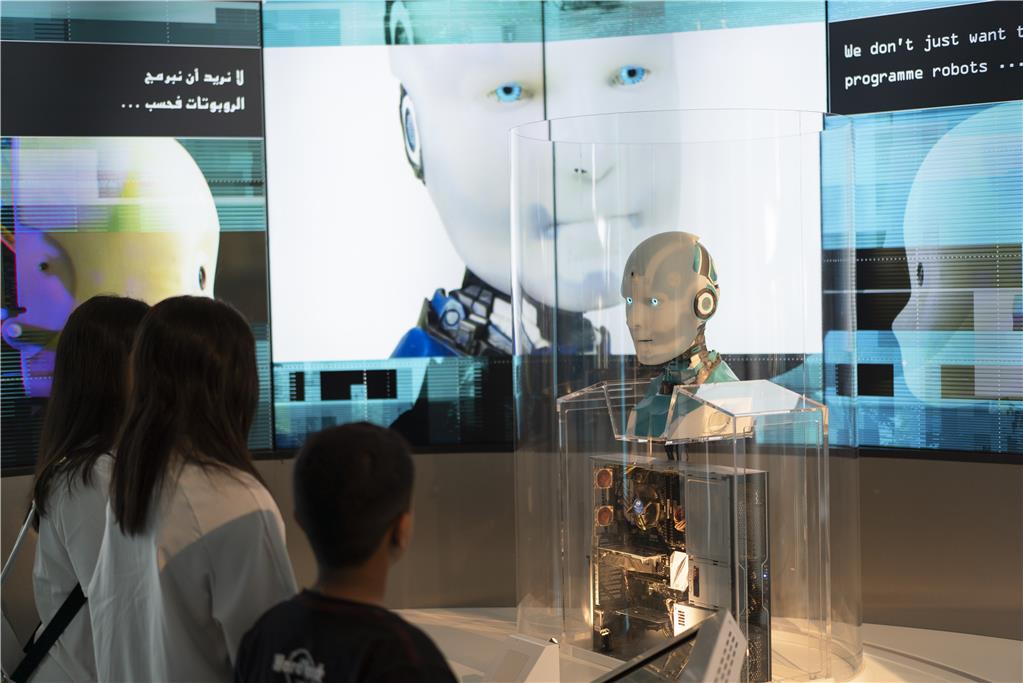
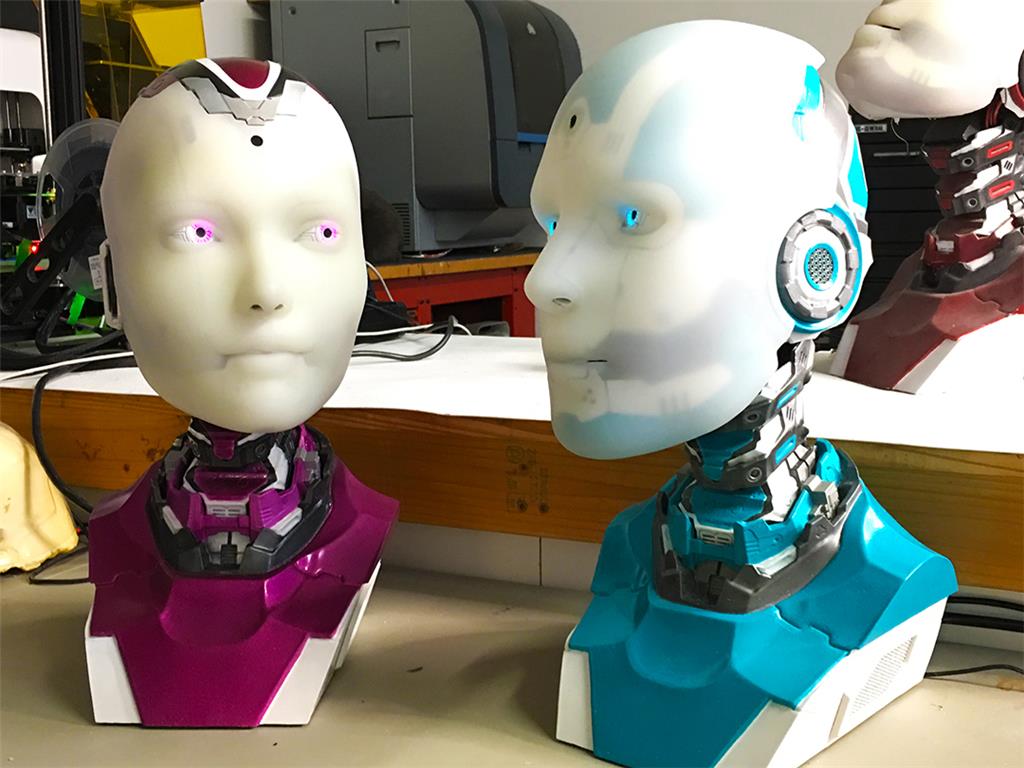
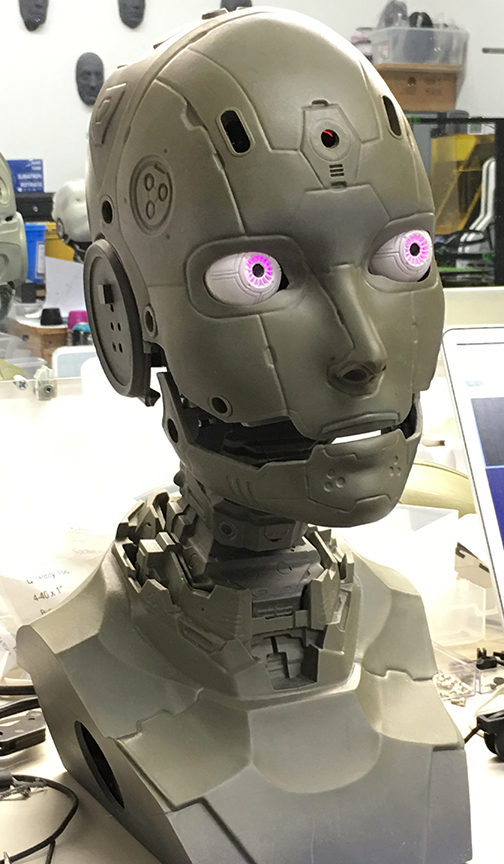
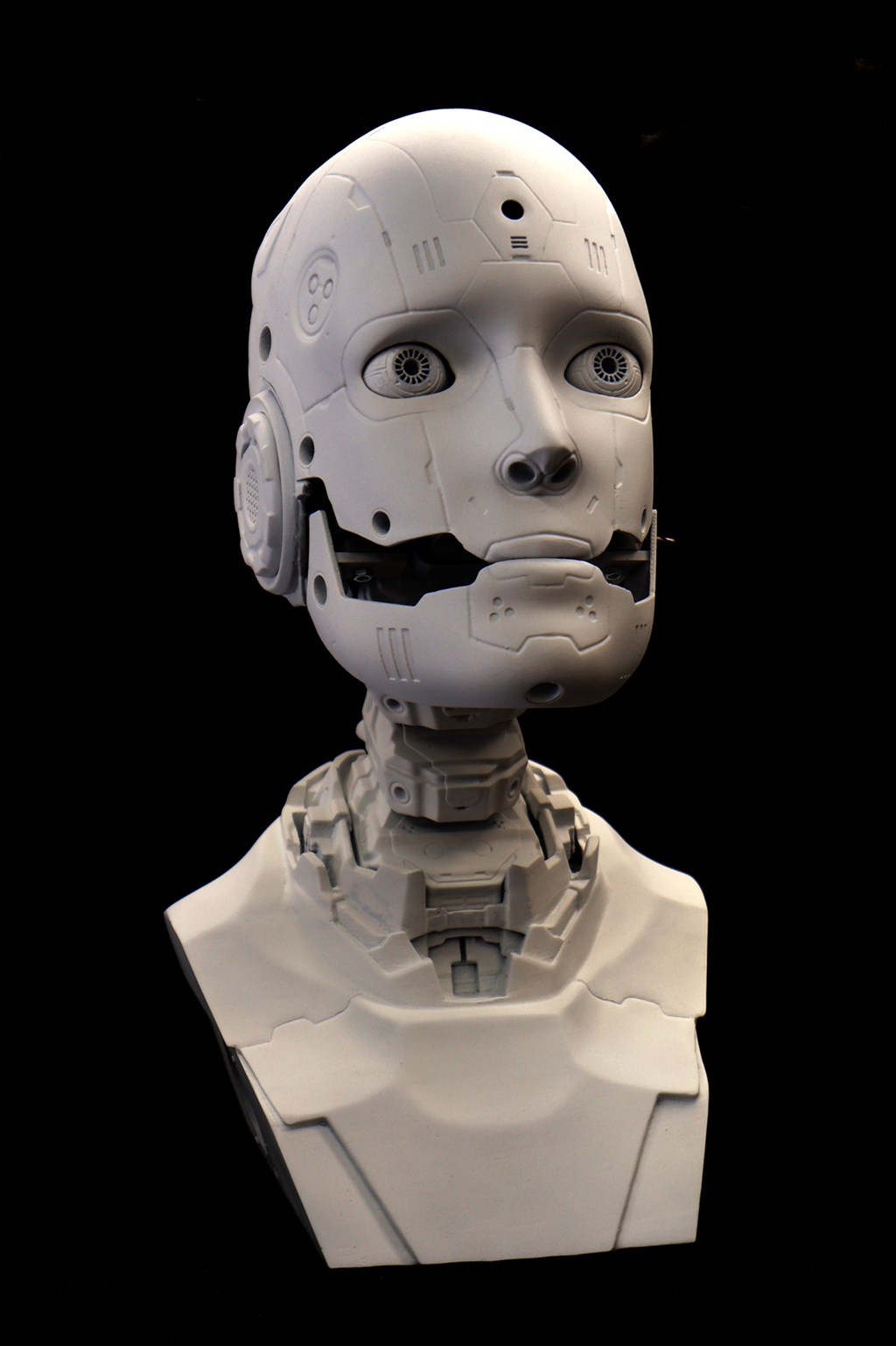
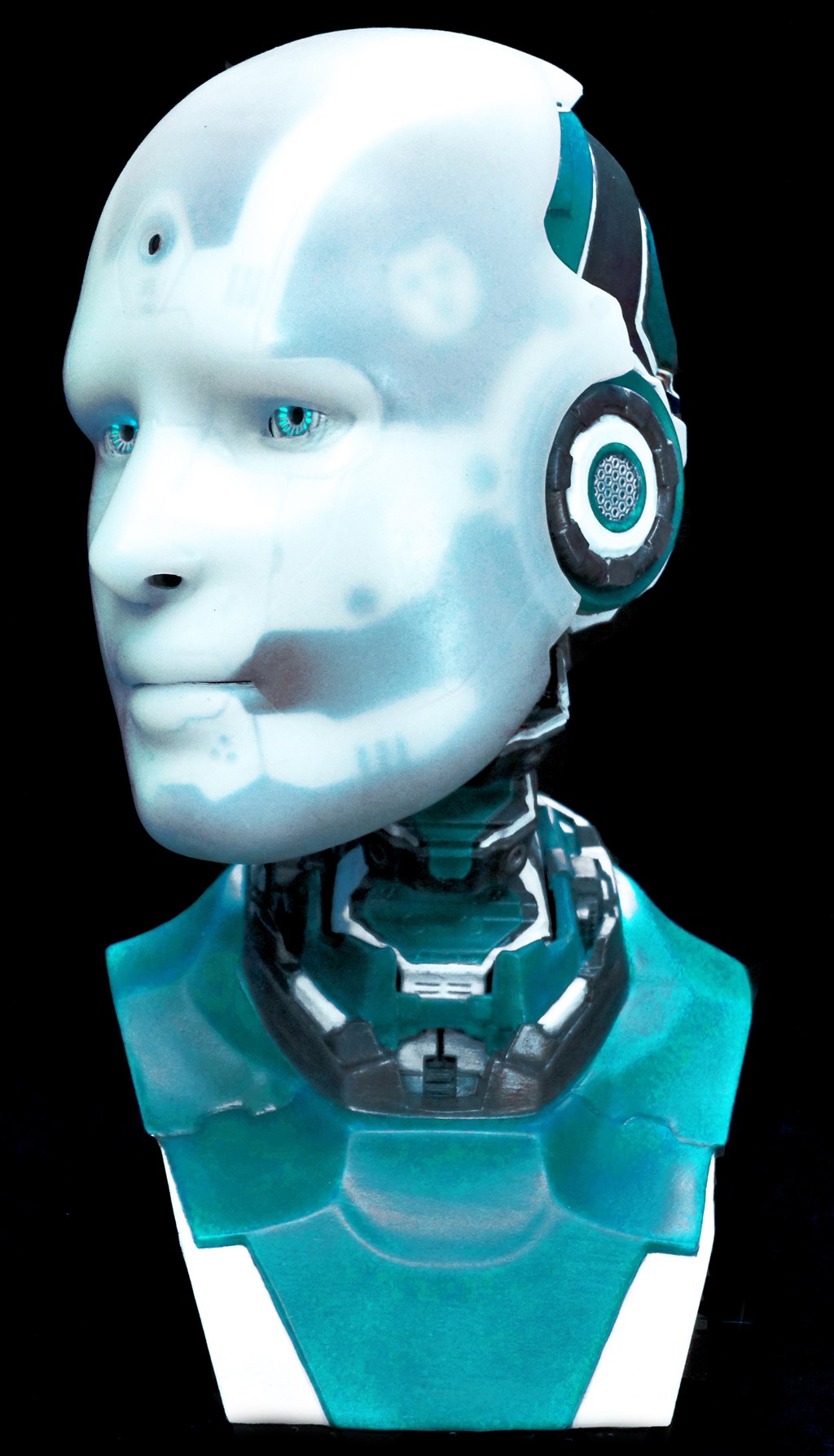
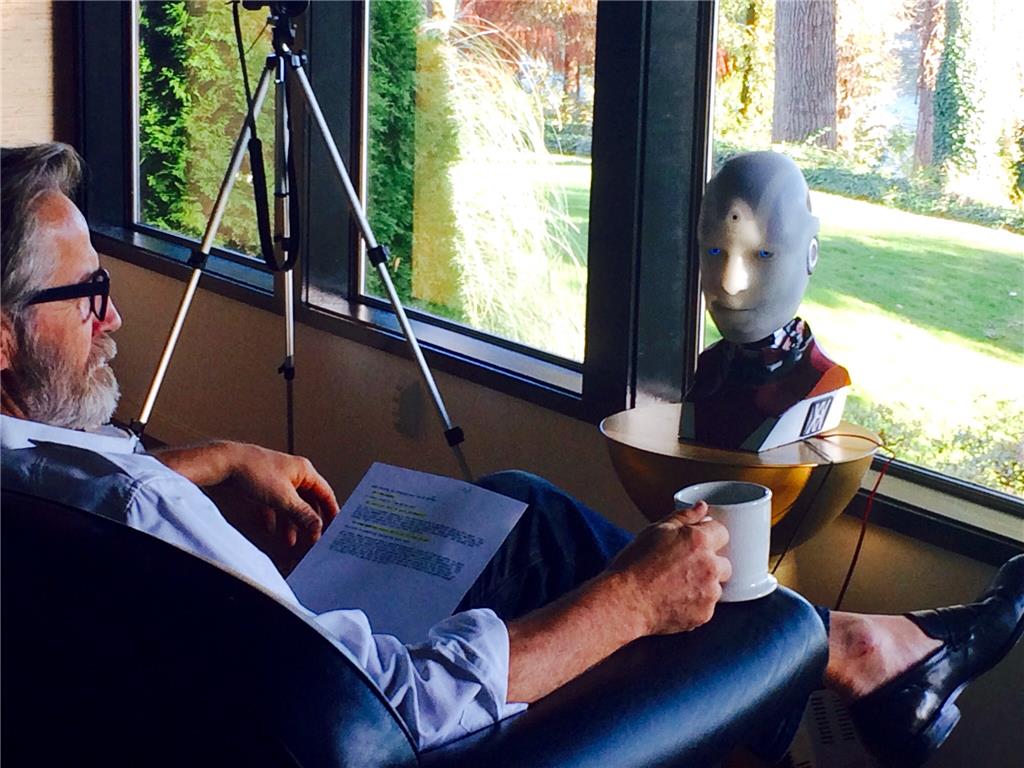
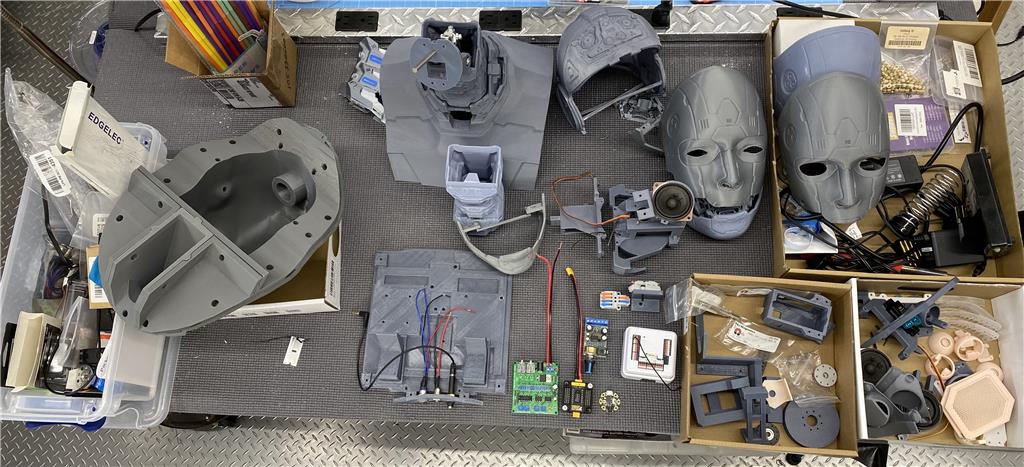
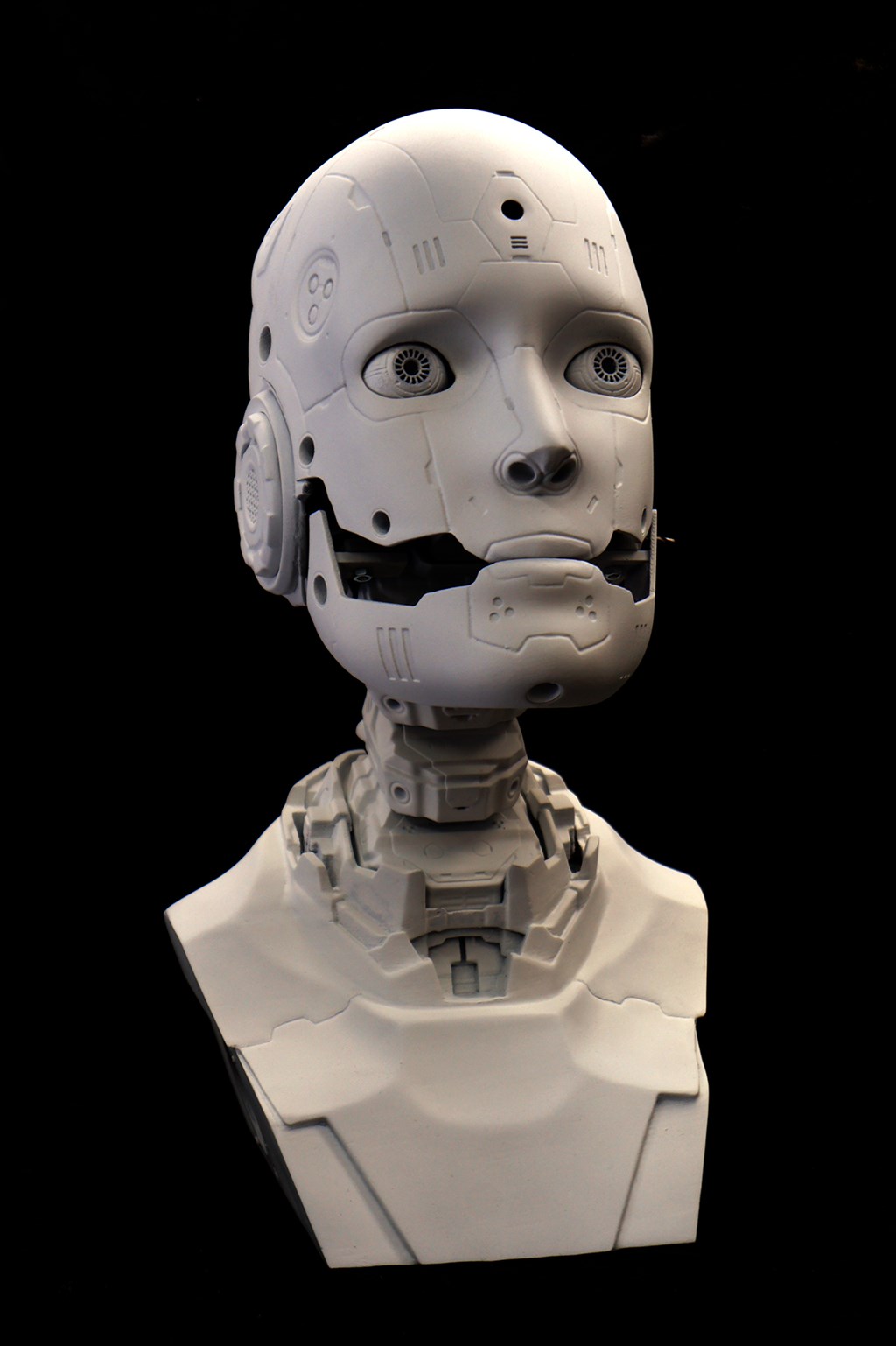
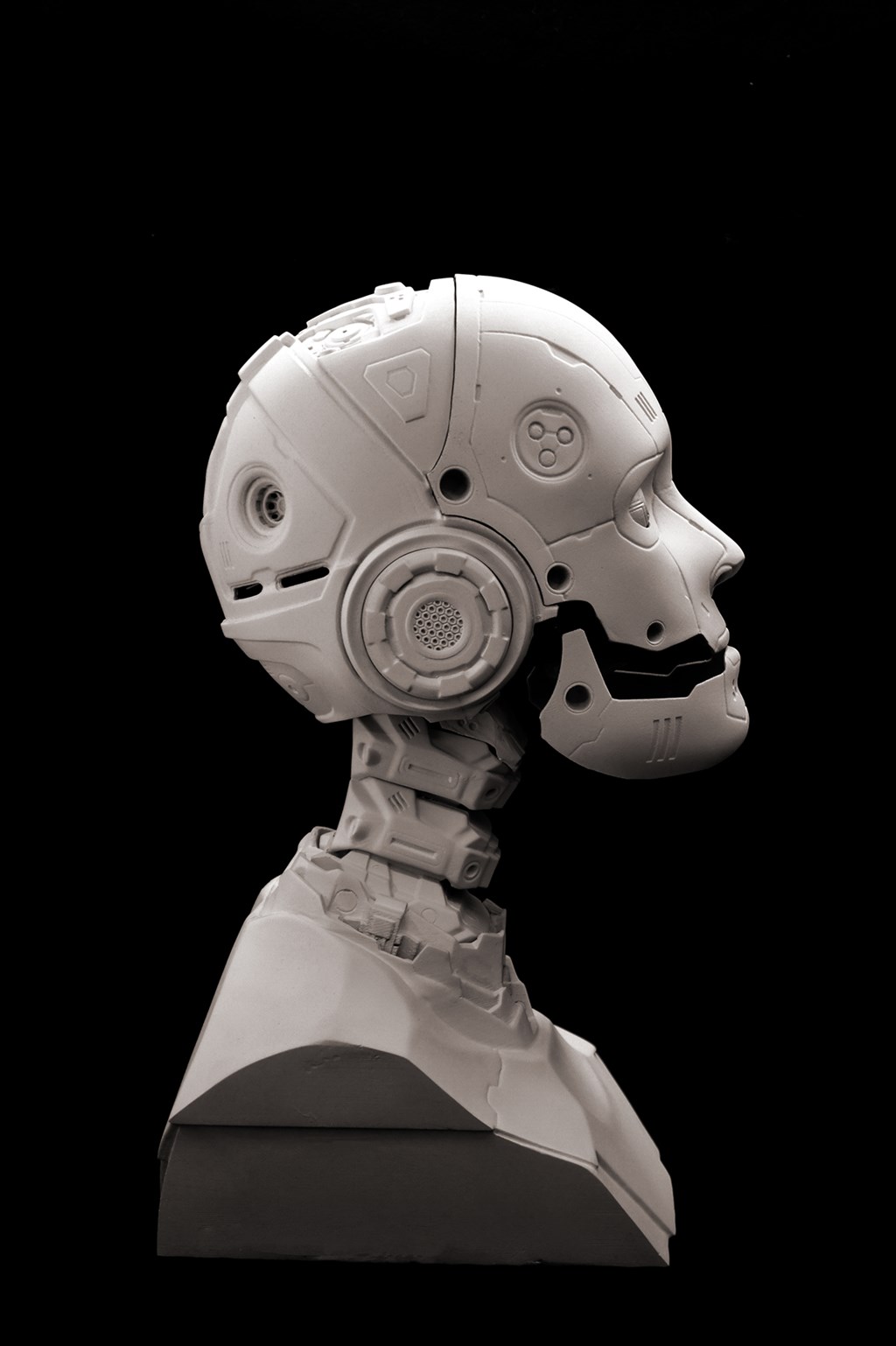
Introducing Alan, the android head robot platform kit, soon to be released on Kickstarter.
First a quick introduction. For those that may not know me. I've been a make up effects artist in the film industry for the past 23 years. Robots have always fascinated me since I was a kid growing up in Ohio and watching Lost in Space episodes. That interest never left me and when starting work in the film industry, I taught myself animatronics. That is I would be called upon to make something move via radio controlled, a puppet, or a toaster or ? As CGI took over the animatronics part of my industry, I focused my free time on using that knowledge for robotics. When I saw prosumer 3D printers come on the market 8 years ago, I knew I could get some of my ideas to the table with out the need for a garage full of CNC machines.
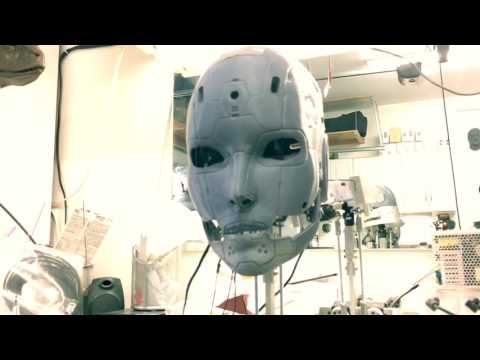
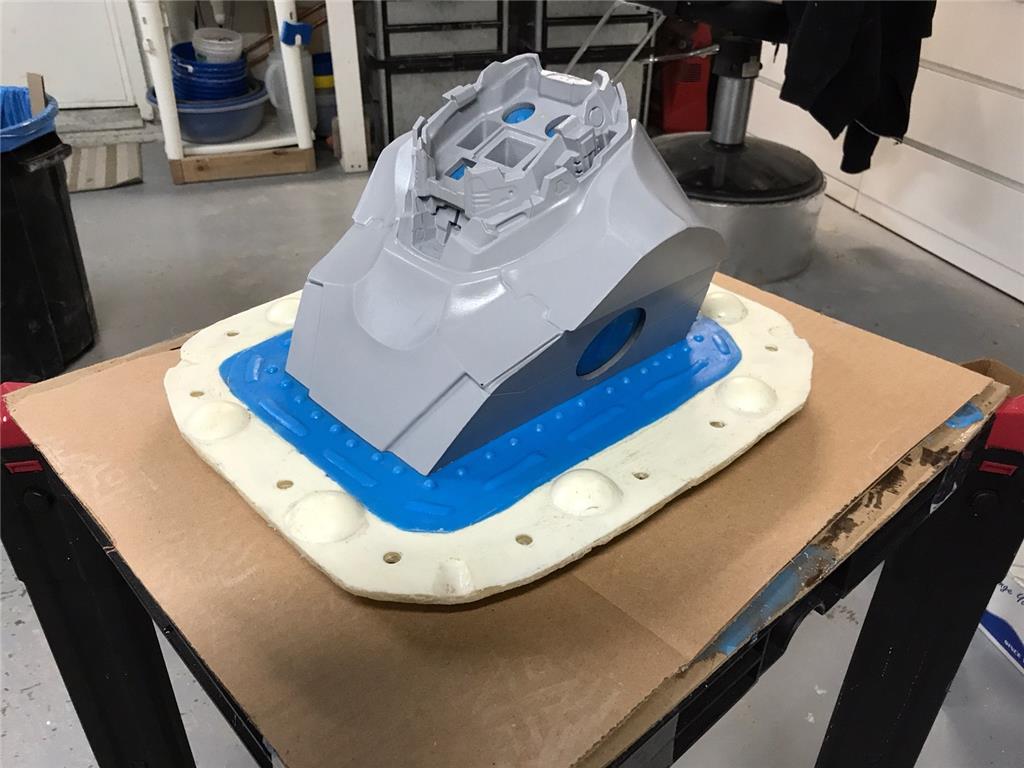
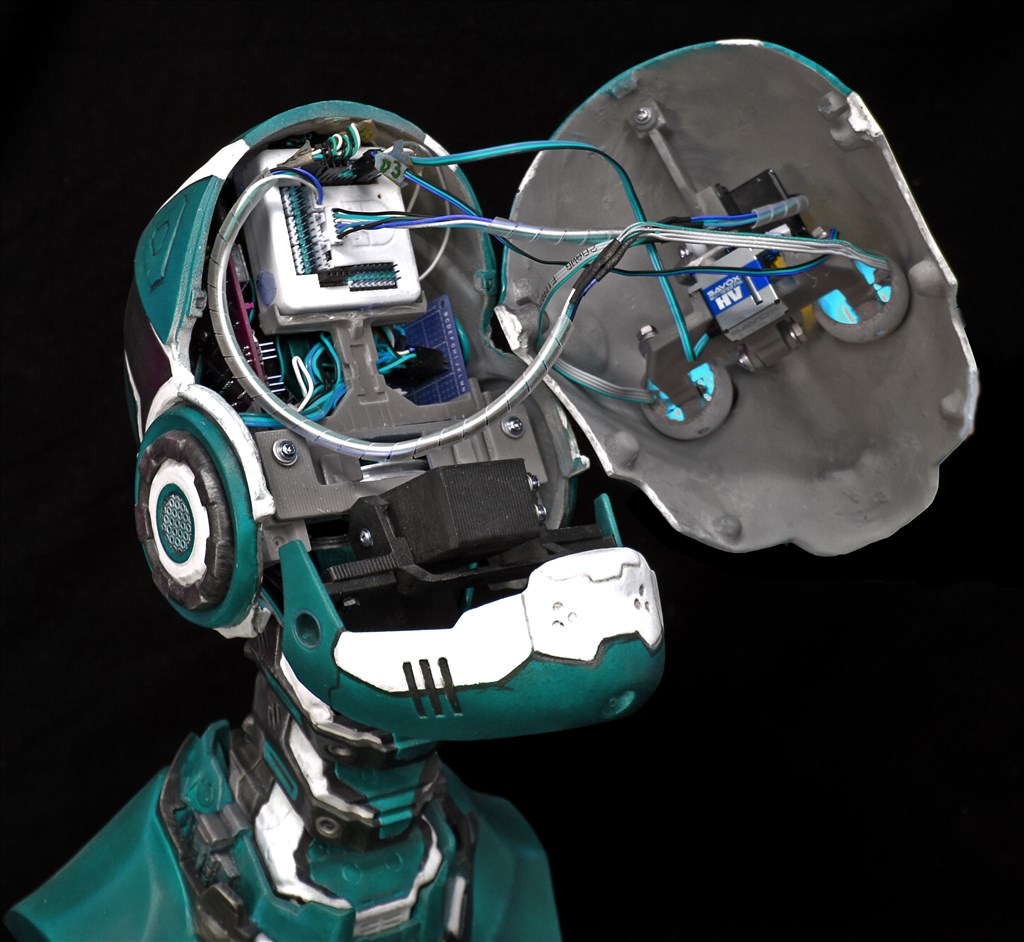
Alan is a culmination of of both technologies, animatronics and 3D printing. When this idea started 3 years ago, I had just found EZ Robots and knew that I could build an interestingly designed kit for everyone so they could experiment with robotics. A platform that personifies how we will interact with robots and androids in the near future, by looking them in the face.
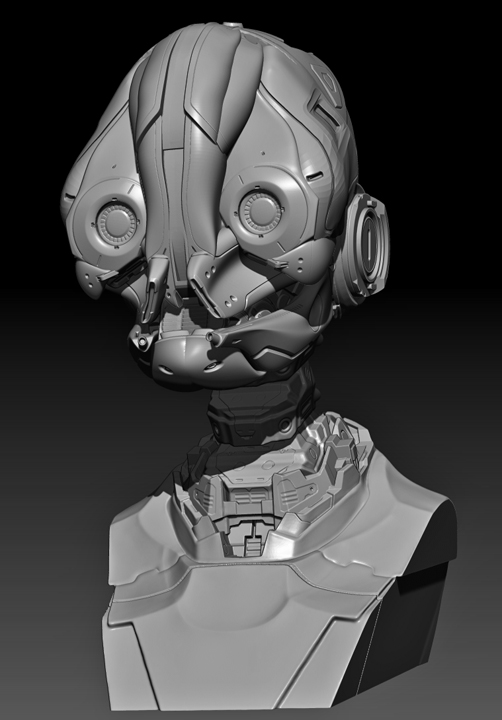
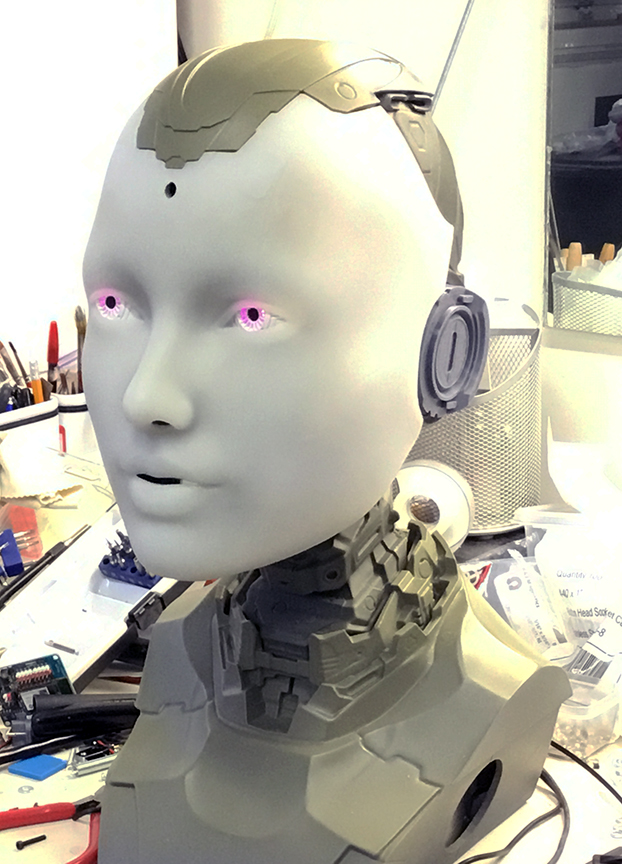
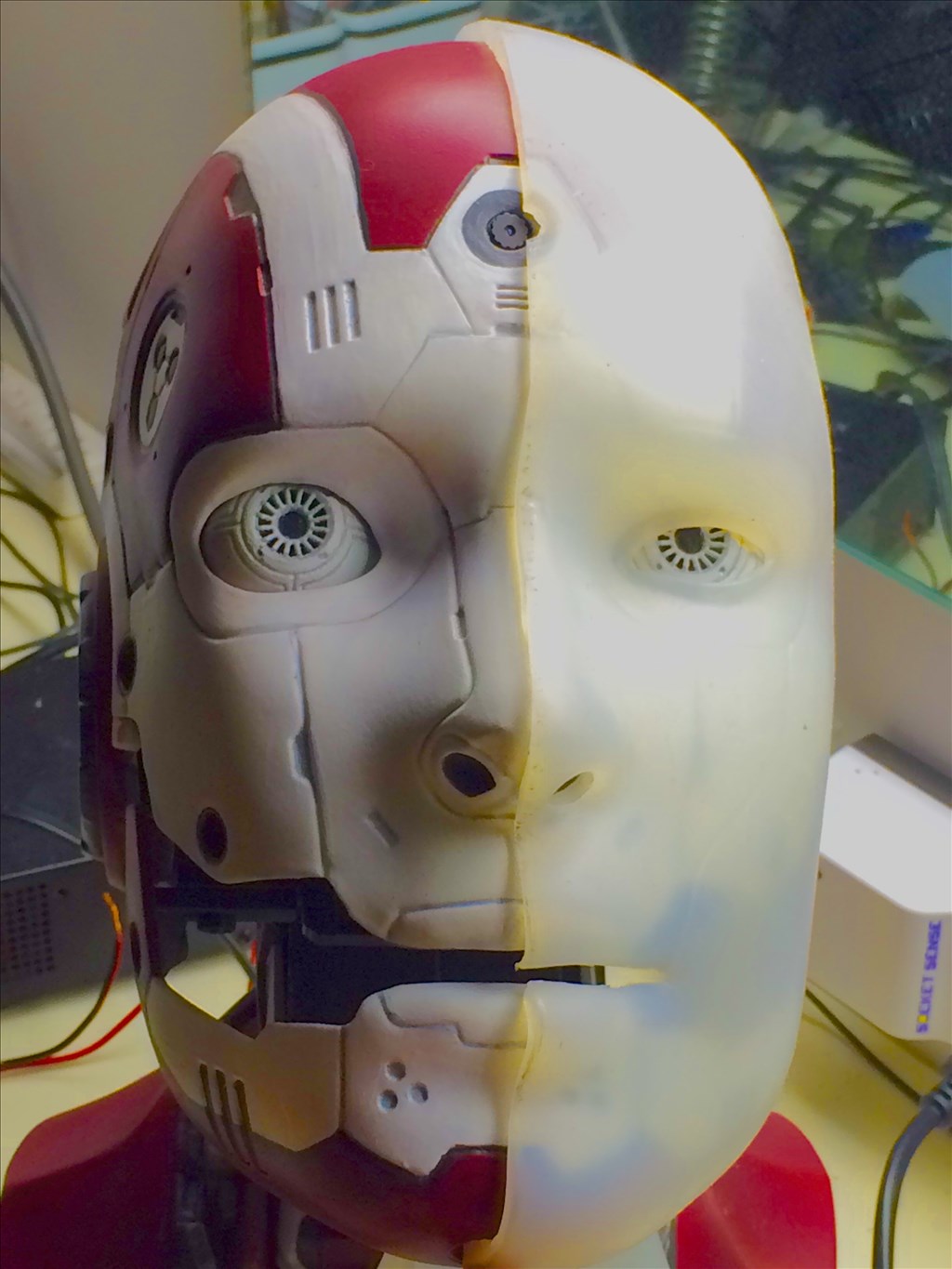
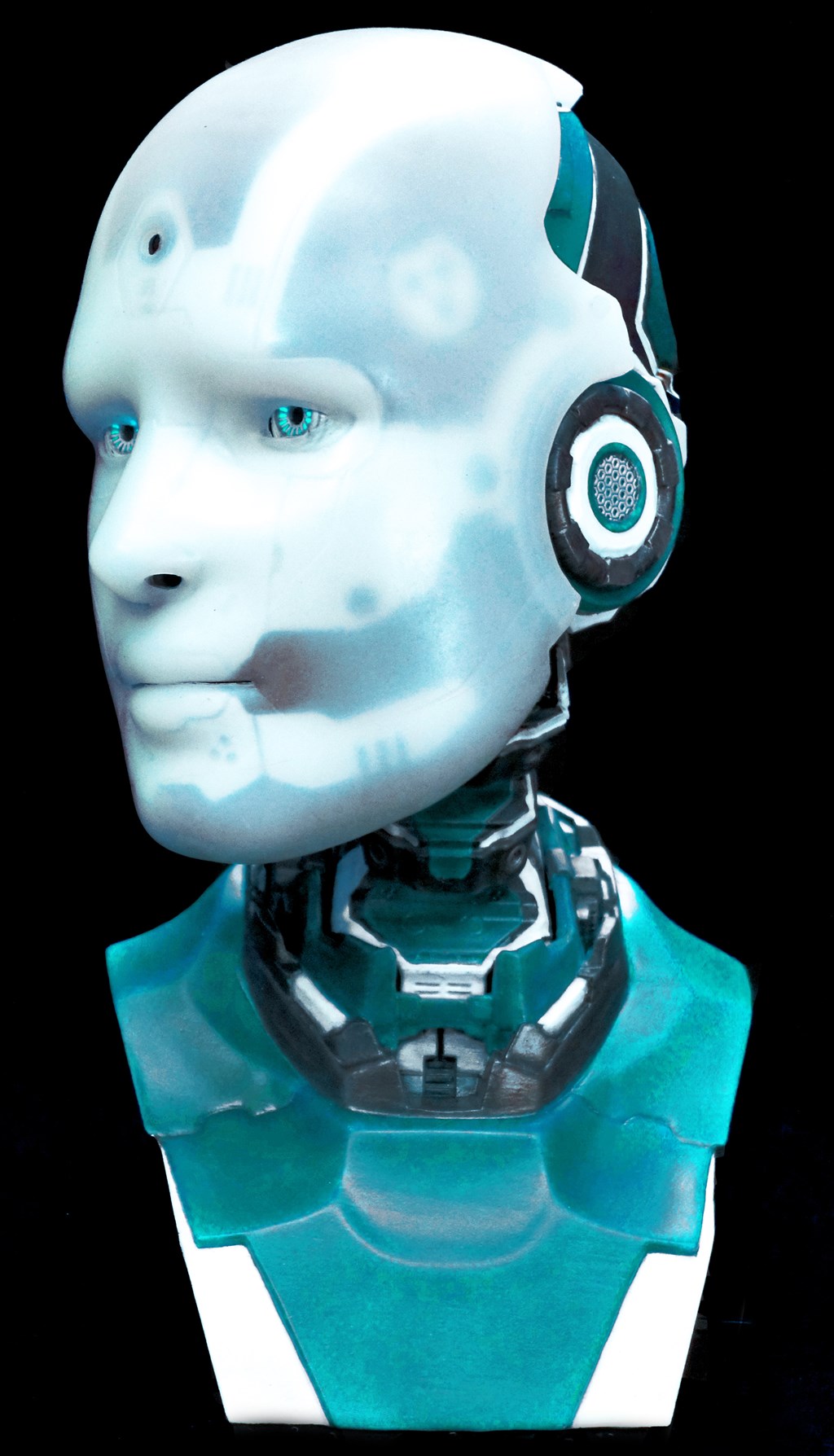
My first challenge was to make sure I leaped over the "uncanny valley". To do so, I took the human dimensions and changed them a bit, eyes wider apart, downplayed high details and added features that were without a doubt not human and certainly robotic in form.
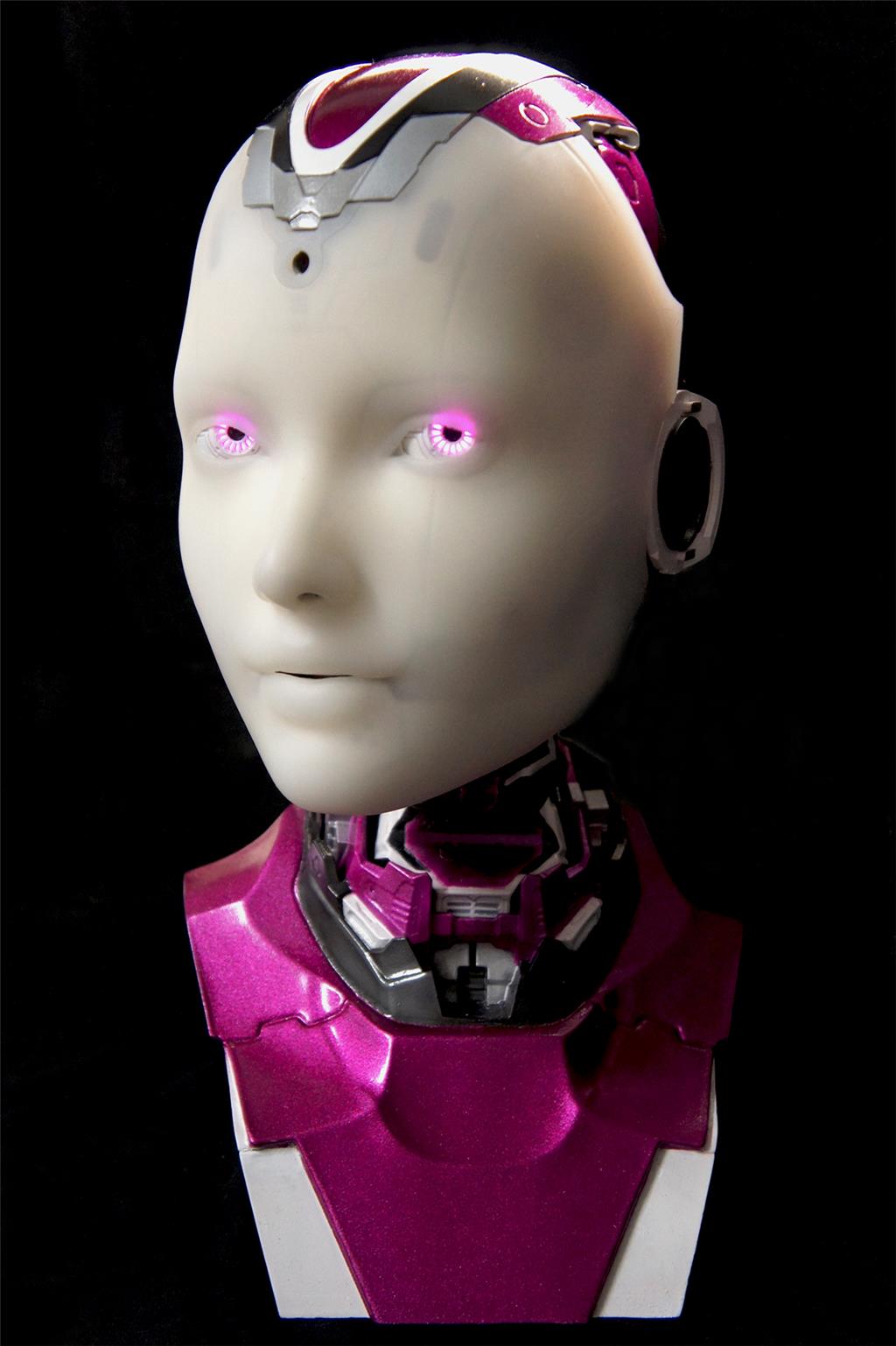
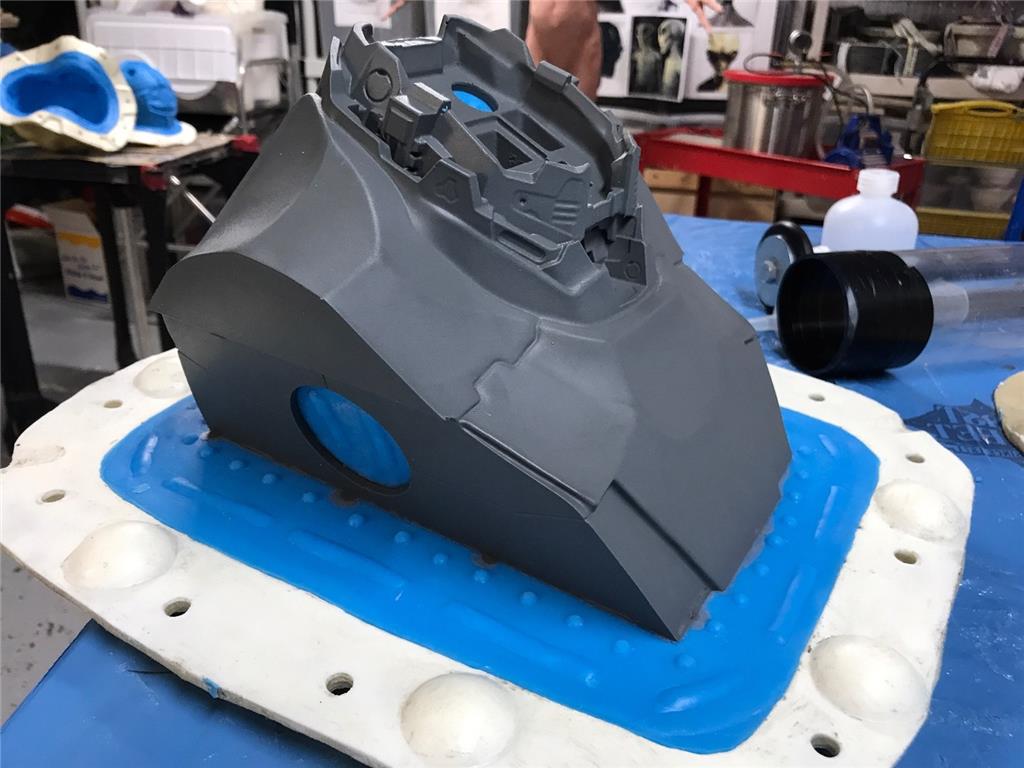
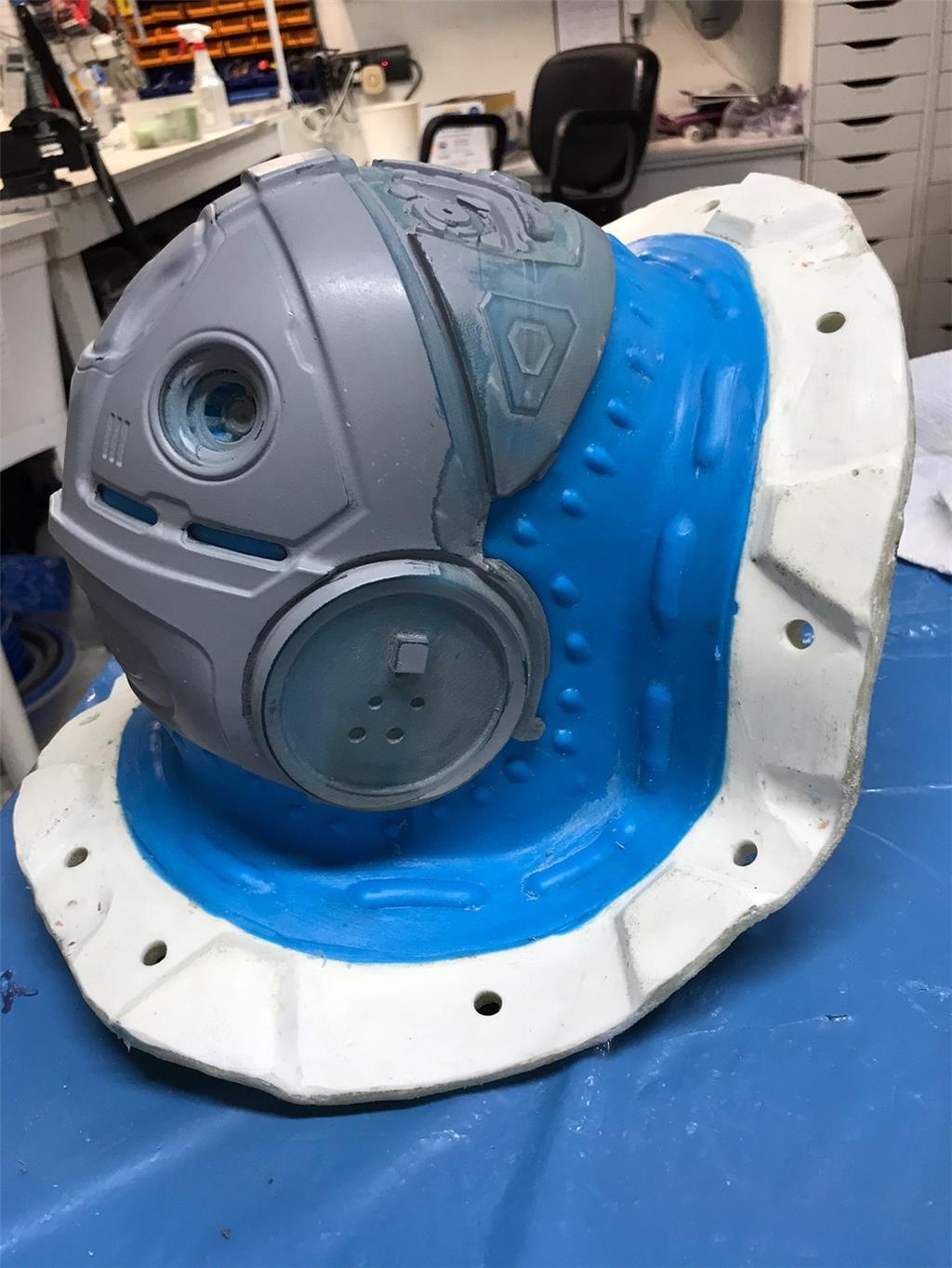
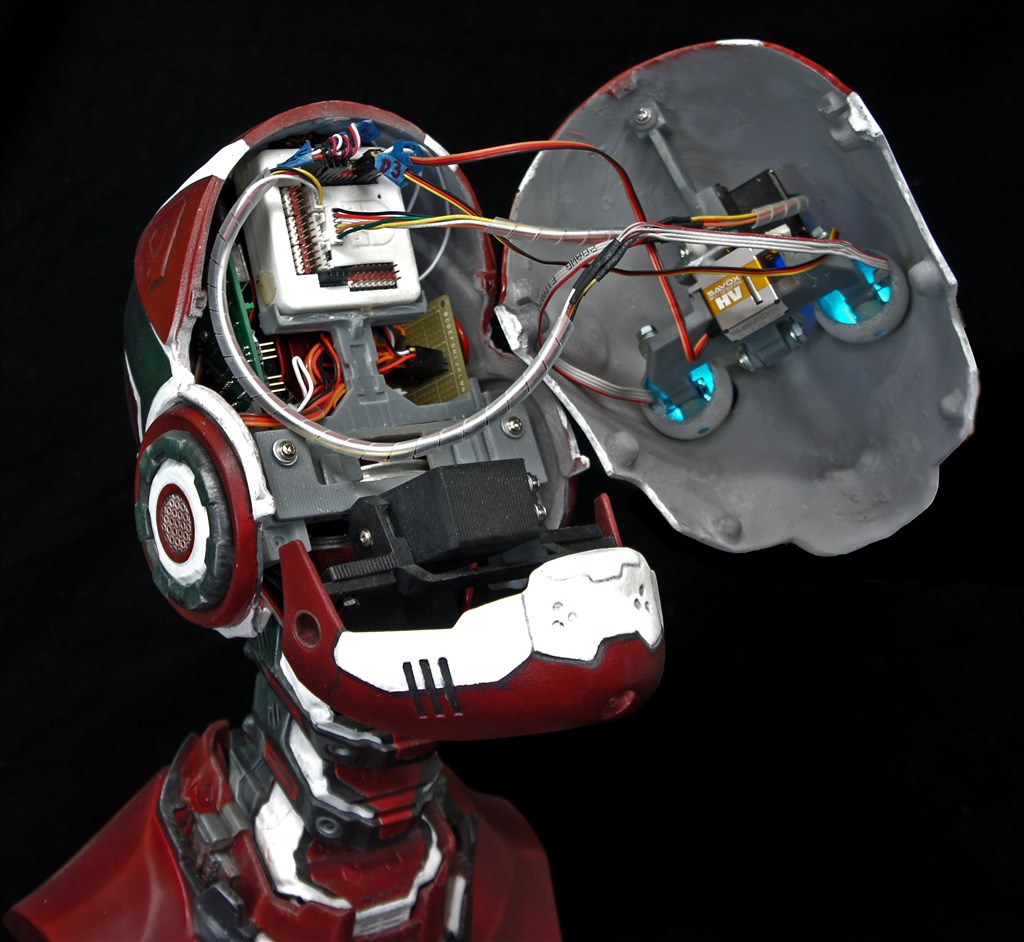
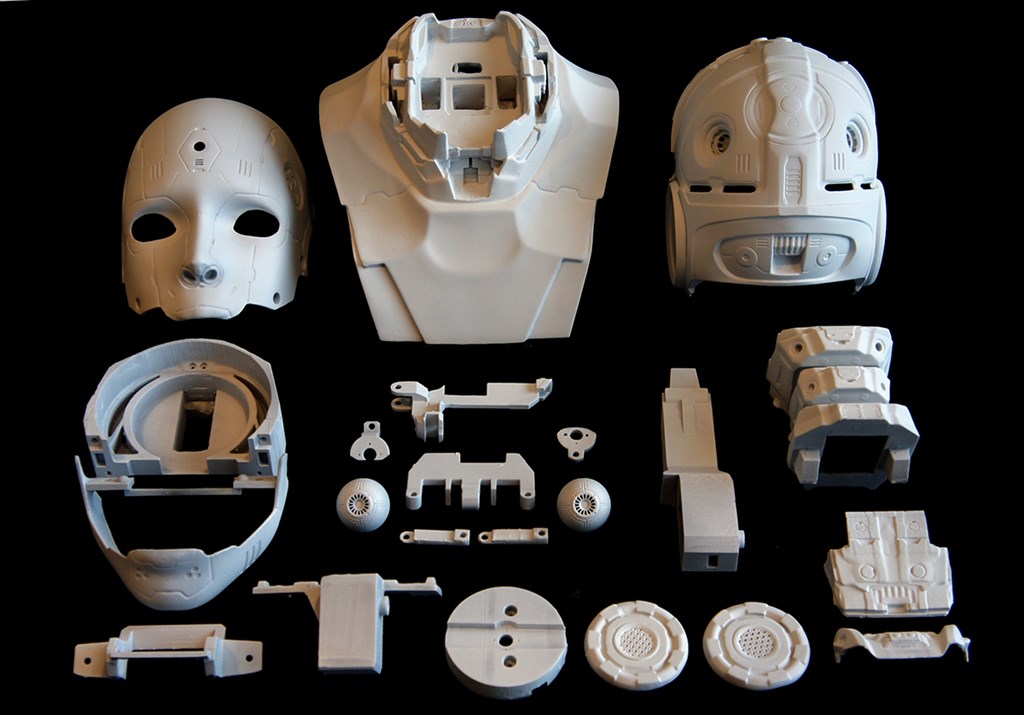
The second challenge was keeping the cost down for consumers. A head like this in the film industry, filled with lots of motions like brow, smile, etc would costs $10's of thousands of dollars. So I built Alan with a modular design in mind. Meaning that the store front will carry modules that will allow you to customize and upgrade the same robot without having to buy a whole new head. As an example the front subskull can be replaced with a module with brow movement, allowing you to keep the entire head and eye mechanism. Other silicone skins will become available different colors and genders, styles, etc. The low cost introductory head will include about 22 parts, easy to assemble, with the consumer supplying servos, power supplies EZB, etc. on their own. My website will include links to all the accessories needed, plus mods like LED eyes, built in audio systems and so on. All the parts will be molded and manufactured in Los Angeles. There will be no pressure injected molding of parts this time around. These are cold cast high impact plastic parts and platinum silicone skins. Alans future may include a full body, if the Kickstarter is successful. And you can certainly use this as a replacement head for InMoov . I will look at altering the open source STL files to be able to accept my heads.
I always knew that the EZB would be Alan's brains. And I will promote it as such. As we all know, DJ's commitment and advancement to the EZB is leading us into the future of robotics.There really is no other choice in my mind. But that's in part because I'm no programmer D. Cochran's EZ-AI is a boon to Alans development. I look forward to where David takes it. And although I have it installed I have yet to implement it with Alan for a few more weeks. All of these working together will be highlighted on the Kickstater video.
D. Cochran's EZ-AI is a boon to Alans development. I look forward to where David takes it. And although I have it installed I have yet to implement it with Alan for a few more weeks. All of these working together will be highlighted on the Kickstater video.
I have several more weeks to finish the paint job and run a new hero silicone skin. Then there is the very important Kickstarter video. So we are at least 4 weeks out. But I will post here the links to both the Kickstarter and Alans website when they go live and as Alan progresses.
I look forward to your ideas for programming and how you would mod him. I'd also like to hear how you would like to see him develop. Thanks for your time and enjoy the development pictures and video.
All the best,
Will



Programming
Camera, Speech recognition, speech synthesis, pad touch,
Parts & Materials
Dynamixels, Arduino, USB camera, EZB 4, micro servos and regular servos
Discover more robots

DJ's Robotis XM430 Dynamixel Arm With Open CM9.04
Doombot's Dirgebot V1


@Bas Testerink. thats interesting I was not aware of any cloud services that can do what the single B5T does (functions listed below) - can you gives some links so I can check the services you refer to out and what they would cost? Thanks.
Face recognition Face detection Facial pose estimation Estimation of facial expressions
This service would also need to do all of this for up to 20 items of each and need to be able to report back the position of each.
I think the best approach is to use a multitude of sensors and services in conjunction. The services should be used to get access to multiple forms of data or perform analysis on data that is provided. The sensors should pickup the local environment to supply the services with the data needed to perform the analysis. These services could be cloud based or local on the device depending on the need of the service. Also, speed is a consideration. For example, if you need to do recognition, you need to be able to perform this recognition pretty quickly. Taking an image from a camera, passing it to the local device, which then sends it to the internet for processing, waiting for this processing, and then getting the data back is much slower than the sensor handling these functions and just passing back the important data. There are also network considerations. Undue network traffic isn't a good thing when you are dependent on this network traffic for other services. Also, you have to consider what happens when your network is down. Does this make your device useless all of the sudden?
There is a lot that goes into designing a good solution.
Maybe I'm at the point in my life that technology has passed me by but the "Cloud" seems a little to much of a gamble for me with a lot of things. I don't totally know what happens to information once it's sent off and where it goes to. I may be way off here but what happens if the company (or where ever your information goes) ends up shutting down, goes out of business or makes a change that makes your connection useless? Don't you end up with a pile of good looking junk that you've worked tons of hours on and shed blood and tears over? I just can't get behind placing my trust in some phantom hard drive and ghost computer that may be over seen by a pail faced teenager recluse living on his parents basement in South America (do they have basements in South America?). This may sound paranoid or unlikely but can anyone promise something like this wont happen? Nobody seems to be able to answer my fears or even care to think this through. We live in a throw away world nowadays. Maybe that's it. People get board or things become obsolete so fast and we move on.
Personally, (admitting my limited knowledge) I feel the cloud is OK to store things on that aren't to critical as long as you have local backup. Cloud processing? Well, maybe if it's not mission critical and short trim. For things I want to keep or keep running I'll trust my own equipment and storage, thank you.
Just my thoughts and fears.
@Will, I think your making some real great choices and moving in the right direction. I'm excited to see where this takes you. I'm honored you are letting us be a small part of this.
Great point Dave! I also see big problems with Cloud processing - when you have a large robot depending on all this cloud processing and the link fails (which it will) you either have a big hunk of robot that is useless or even worse dangerous. I personally believe that we should never get away from local processing with independent sensors and (some) onboard intelligence - thats the way I design my robots.
The cloud does have fascinating possibilities though, say their were a few thousand ALTAIR's out their all with cloud linked learning, where you teach your robot something and then all the ALTAIRs can then do the same function - this is possible now and I have already done this with my Ai ARIEL where 3 separate people are teaching her at different locations, different things, but what she learns is then available to all 3 of us. This is very cool, but what happens when their are thousand of users out there and one teaches the robot to something bonkers like wield a knife etc, it gets dangerous. I know our robots of today cannot do the mechanical part of this easily, but we are not far off from the time when they will have the mechanical capabilities.
Tony
I feel the same as Dave S. and Tony. If you entrust your data to a "cloud" without having a local backup and that cloud dissapates (business reasons or tactical), you are stranded. I have too much of a Mulder-like paranoia; I'll keep my data local, and obtain as many processors or drives as it takes to accomplish what I need. If my Alan require it, he'll wear a backpack with extra processors and hardware. Whe Skynet becomes active, he'll help me fight rather than turn on me.
There was a story - I believe it was "When the Machine Stops" - that was about a society that was so dependent on automation that one day when the power failed, people sat in their homes and died because they couldn't care for themselves.
Technology is wonderful - but it's a tool to be used, not the other way around.
Whew! That got a bit heavy. Sorry eek
Wow woke up to some great conversations! @bas, I would love to see where this takes us. I think as Internet and maybe even cell service reaches giga bit speed might make some applications viable on the cloud. It will be an interesting area to watch develop.
@troy thanks for the kind words and the support. There are days where I wake up and say this is never gonna work, I'm never going to reach the goal, or there's not enough exposure, or? But waking to support like that really keeps the hopes up! Thanks!
@d.cochran, yeah its alot of info to be processed, maybe it is a hybrid of the two like you suggested. I think alot of depends on whats in development and how it utilizes the data. Each device might be different.
@Dave S, i here ya on that and the cloud, it is a very ambigous concept. Who and where is that data being stored. It seems that if you put a fluffy name to a new technology like "cloud", it seems benign and people won't question. And thanks for the Kudos!
@toymaker, Thanks for the data on pricing for the B5T sensor. I think this would be amazing for our robots! With the speed of evolving technology and the length of time it takes to get to market, it seems you can continually evolve a product, increasing the capabilities! Exciting times!
Out of curiousity, I know the B5T has some unique features, but has anyone experimented with the additional Haar Cascades that can be added to the ARC camera control?
@jeremie Is it possible to create custom Haar cascades for facial expressions?