



Hey all! just wanted to show off my finished robotic hand design! Designed entirely from scratch, including DIY linear actuators using standard servos. Powered by arduino and programmed using synthiam/ez-robot software! Thank you for continuing to develop such great software for us inventors to use in our projects!

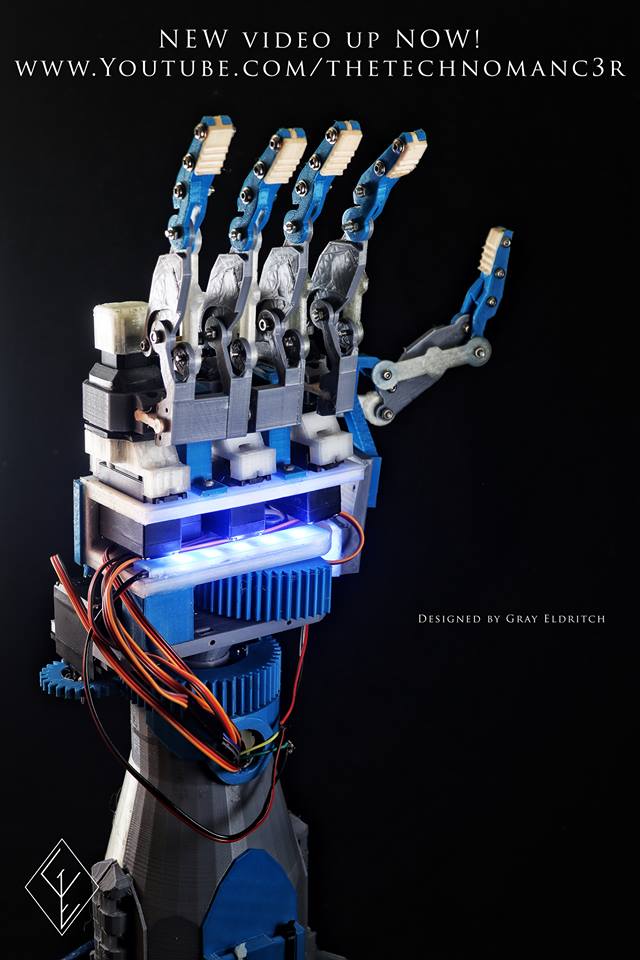
By TheTechnomanc3r
— Last update
Other robots from Synthiam community

Rich's Jarvis Add-On #1
Robots needed be mobile, walking, talking beings... so I plan to do something I doubt has been thought of before... Im...

Kenny's Everybody, Meet Phil:)
Just got my EZ-B today, and I hit the ground running:) This is my robophilo robot. Hes the cheapest 20 DOF robot on the...
Mitzeljk's Meet Modi
This is Modi (Mobile, online, digital , interface) , my first attempt at ever building a robot. I am new to pretty much...

Very nice!
Yes I will also watch your future videos
be well
Wow! Amazing work @TheTechnomanc3r
I always enjoy your projects as you put a lot of creativity into them.
Did you come up with the rotating thumb idea? I've never seen that before. Is there a story behind it?
Supercool!! Keep up developing, it came out great!!
Very cool ! its so amazing what we can do with servos and a 3D printer.
its so amazing what we can do with servos and a 3D printer.
EZang60 - Thanks! Glad you like it!
Jeremie - Thank you! I actually work as a profession artist as my day job, so I guess some of that aesthetic naturally translates into the robotics as well! The thumb was actually just something I came up with as sort of a workaround to fit all the servos while still having a lot of motion. I made it sort of a goal to make the hand have more motion than a lot of the other humanoid robot hands out there, I thought it would be cool if my robot could give me a "thumbs up" when I finally finish it! haha
Micker666Maus - Thanks! I definitely have big plans for this project!
Robohappy - Oh definitely! Getting my first 3d printer was a game changer for robotics!
Here's an update! I made an alternate version of this hand that has slightly less motion, but is lightweight and uses fewer servos. We'll call this one "Mk 2b"
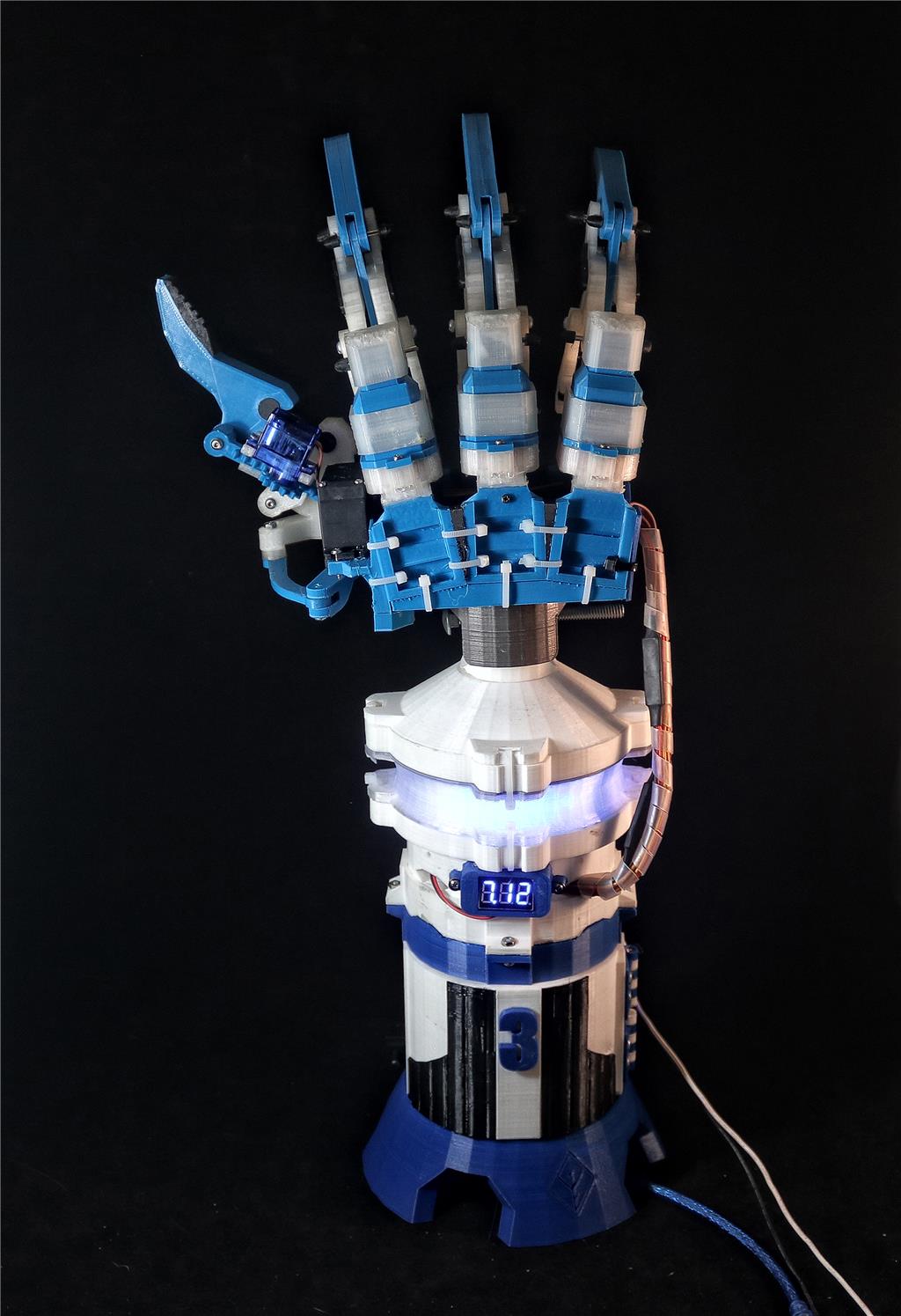
Another update! Here's the start of "Mk3" - the "finalized" version of my hand design (at least for now) - the forearm is done too, I still just have to finish the video!
Wow - don't know how this slipped by me. Fantastic!!!! Super impressed because humanoid hands are a big deal right now. Lots of people are trying different methods of doing it and you seem to have a great design.