




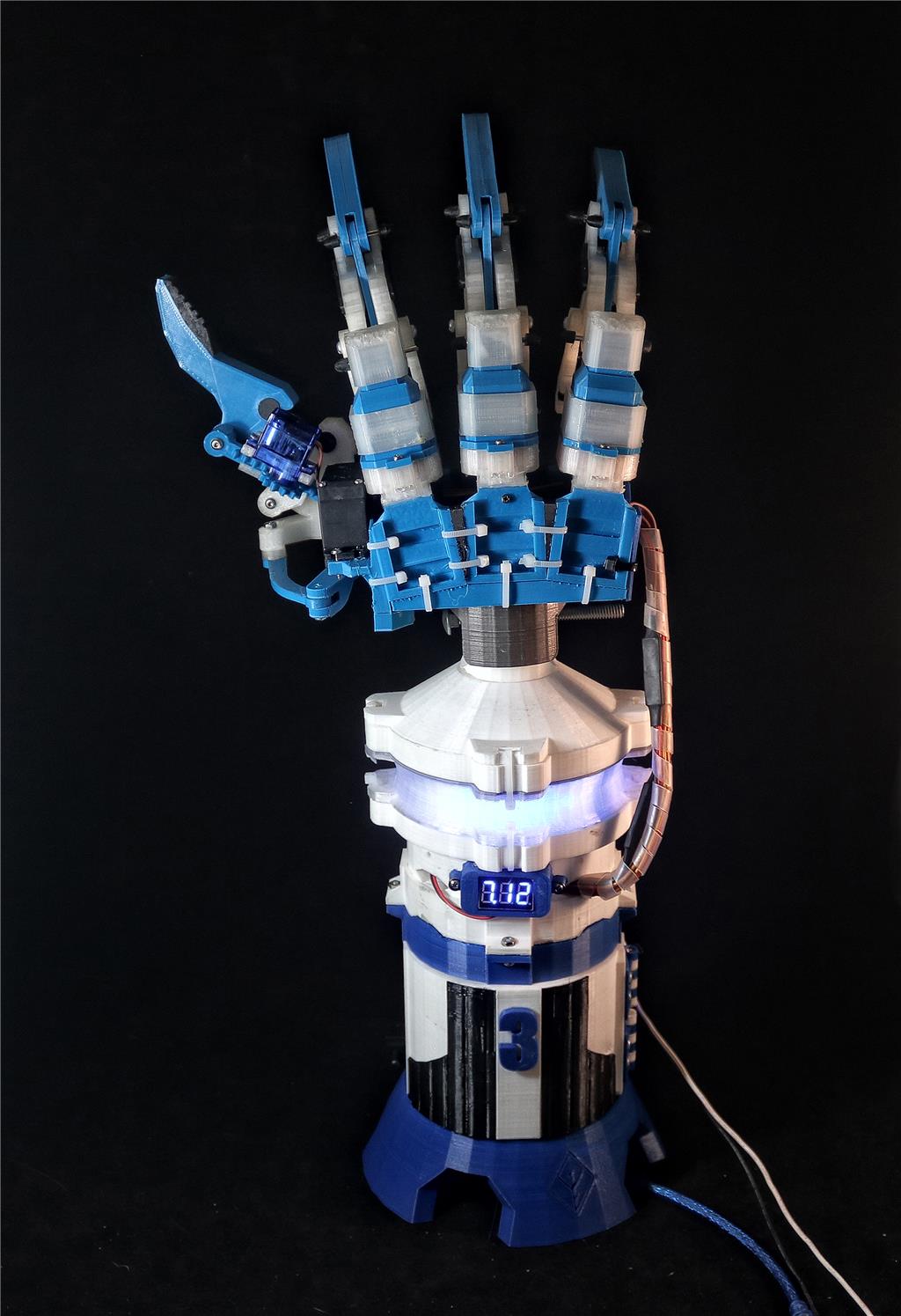
Hey all! just wanted to show off my finished robotic hand design! Designed entirely from scratch, including DIY linear actuators using standard servos. Powered by arduino and programmed using synthiam/ez-robot software! Thank you for continuing to develop such great software for us inventors to use in our projects!

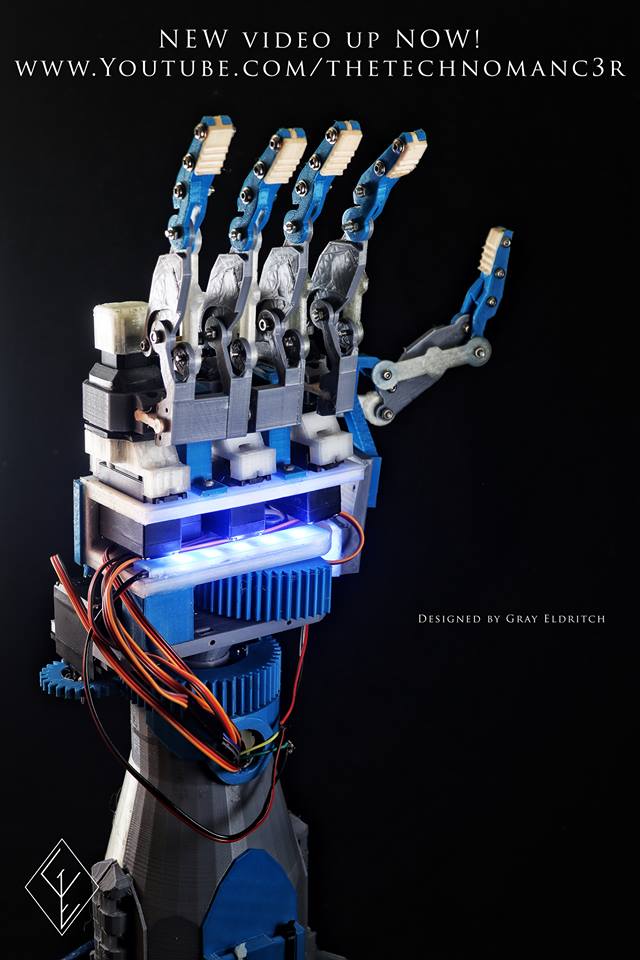
By TheTechnomanc3r
— Last update
Discover more robots
Moviemaker's Bob And Marty
Photos of Bob, Marty, Leaf & MEL and Fred - quick snapshots uploaded to share and enjoy.
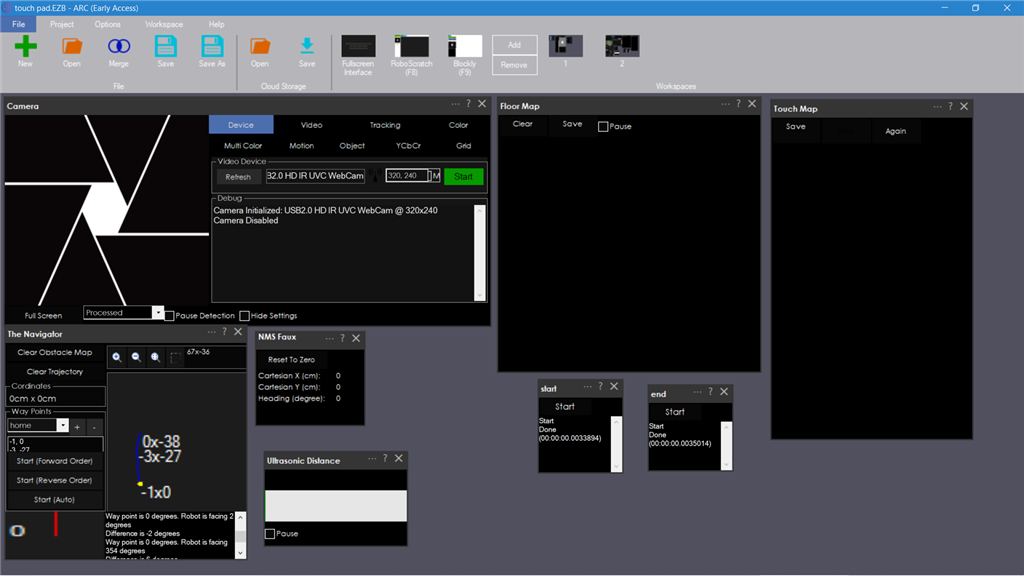
Ezang's New Video - Using Floor Map And Touch Path Maps And...
Floor Map, Touch Path and Navigator enable simple path following; IoTiny hotspot guides your car-Intel RealSense...

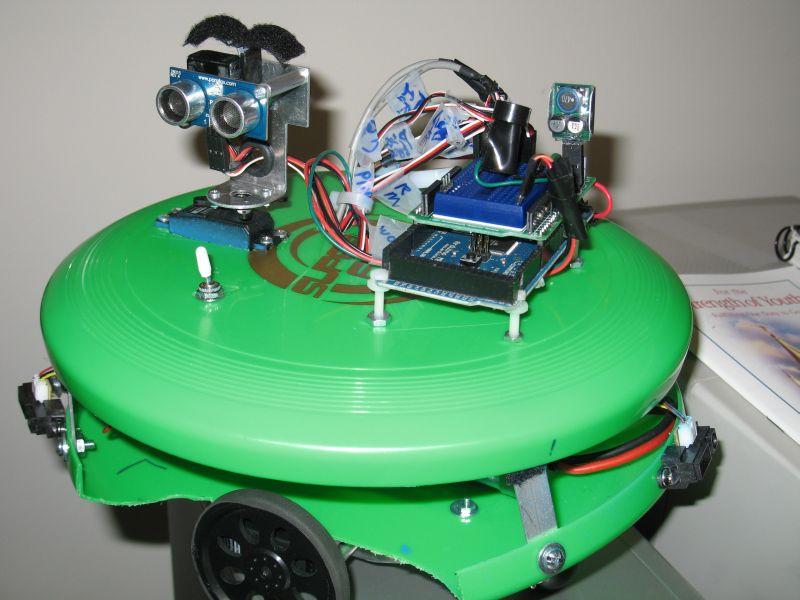
Tymtravler's Starting On Jac
Building JAC tracked rover with strong rubber tracks, stair-climbing ability and a beefy arm that can grip a beer;...

Great videos, the hand moves very fast for actuators, when will the .stl files become available, as printing all the parts will take some time, having the printed parts completed and ready for when you produce you tutorial, would in my view the better way to go. and you would get feedback on printing issues that may arrise.