













































By David mcsdaver
— Last update
Discover more robots

Rb550f's Meet Tk
TK robot - 31in tall, 12in base, 12lb with 12V battery; rotating torso/head, tilting dome, arms w/3 HD servos, digital...

Mattbrailsford's Omnimc
Convert an Omnibot 2000 into OmniMC media center with Raspberry Pi (RaspBMC), RC control, EZ-Robot kit, screen, battery...
Djandco's Djandco's Wall.E
EZ-B Wall.e arm mod using small Arduino servos to retain clutch and deliver about 80 arm travel; neck servo planned.

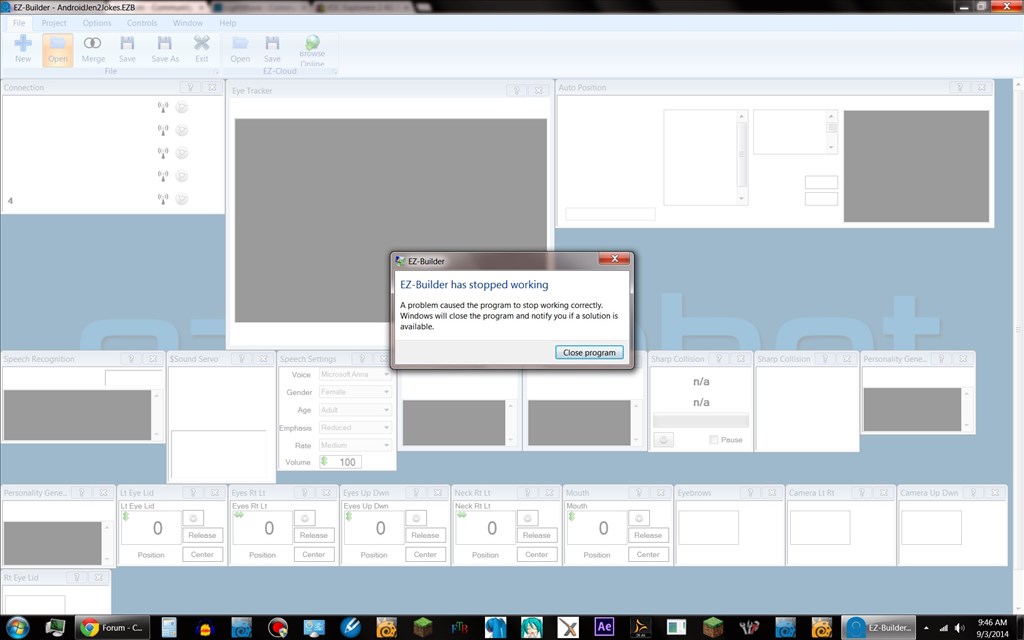
The error usually means that a value is larger than what is allowed (or smaller). It could also be that a servo is assigned a number that is larger or smaller than is allowed. I would reinstall ARC. If that doesn't fix it, DJ will have to address it in the code. I don't have a functioning robot at the moment Or I would try it. You could post your project and see if anyone else has an issue running the auto possitions with their ARC install.
If your using ax-12 servos, I don't know but maybe one of the servo id's got messed up. I don't use these so it is just a guess.
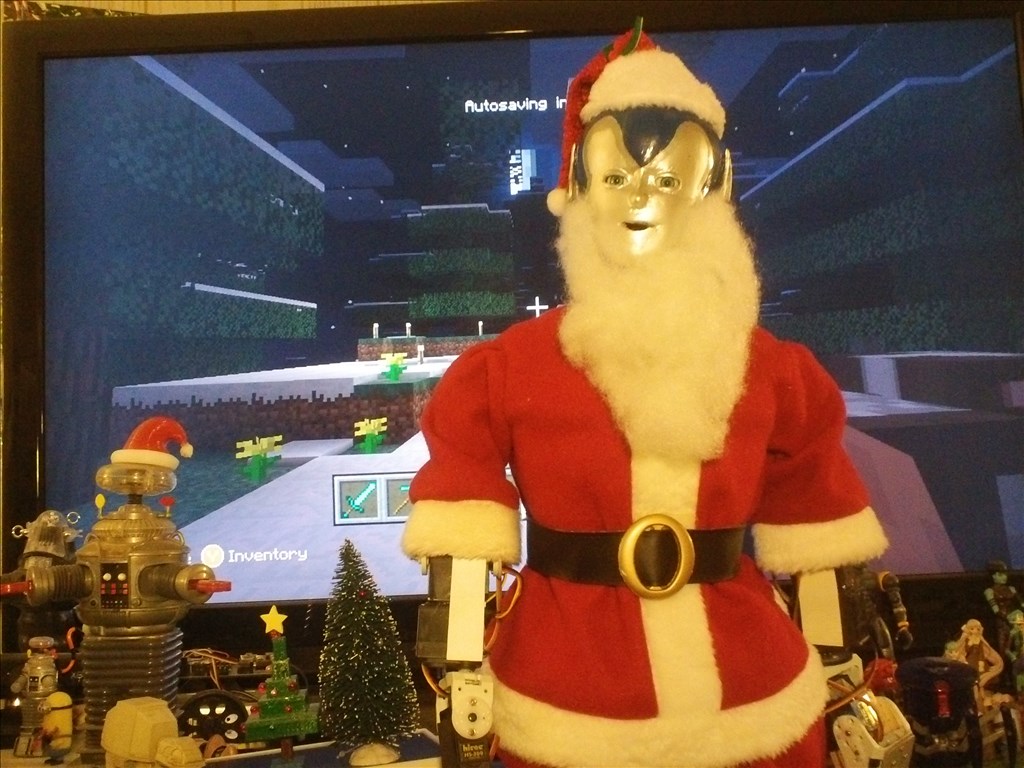
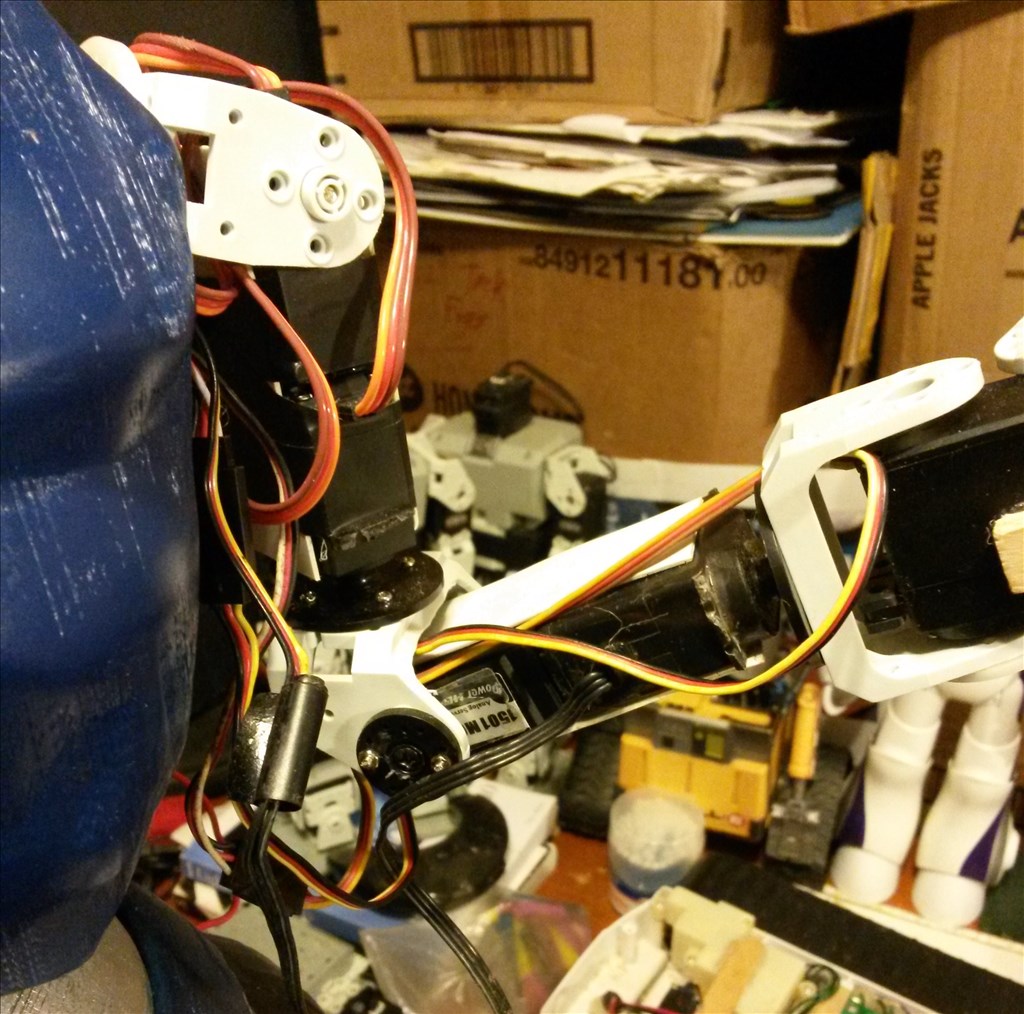
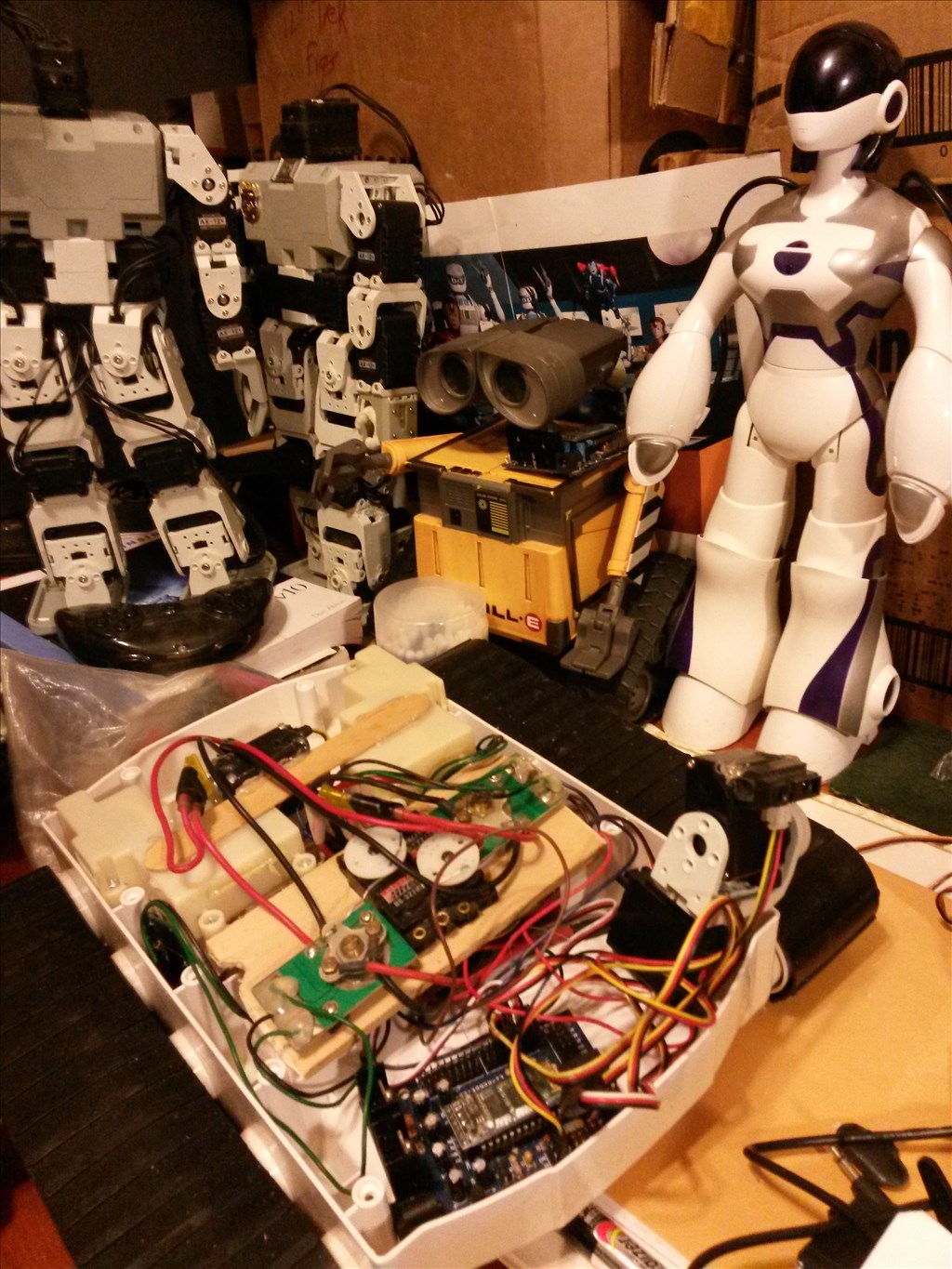
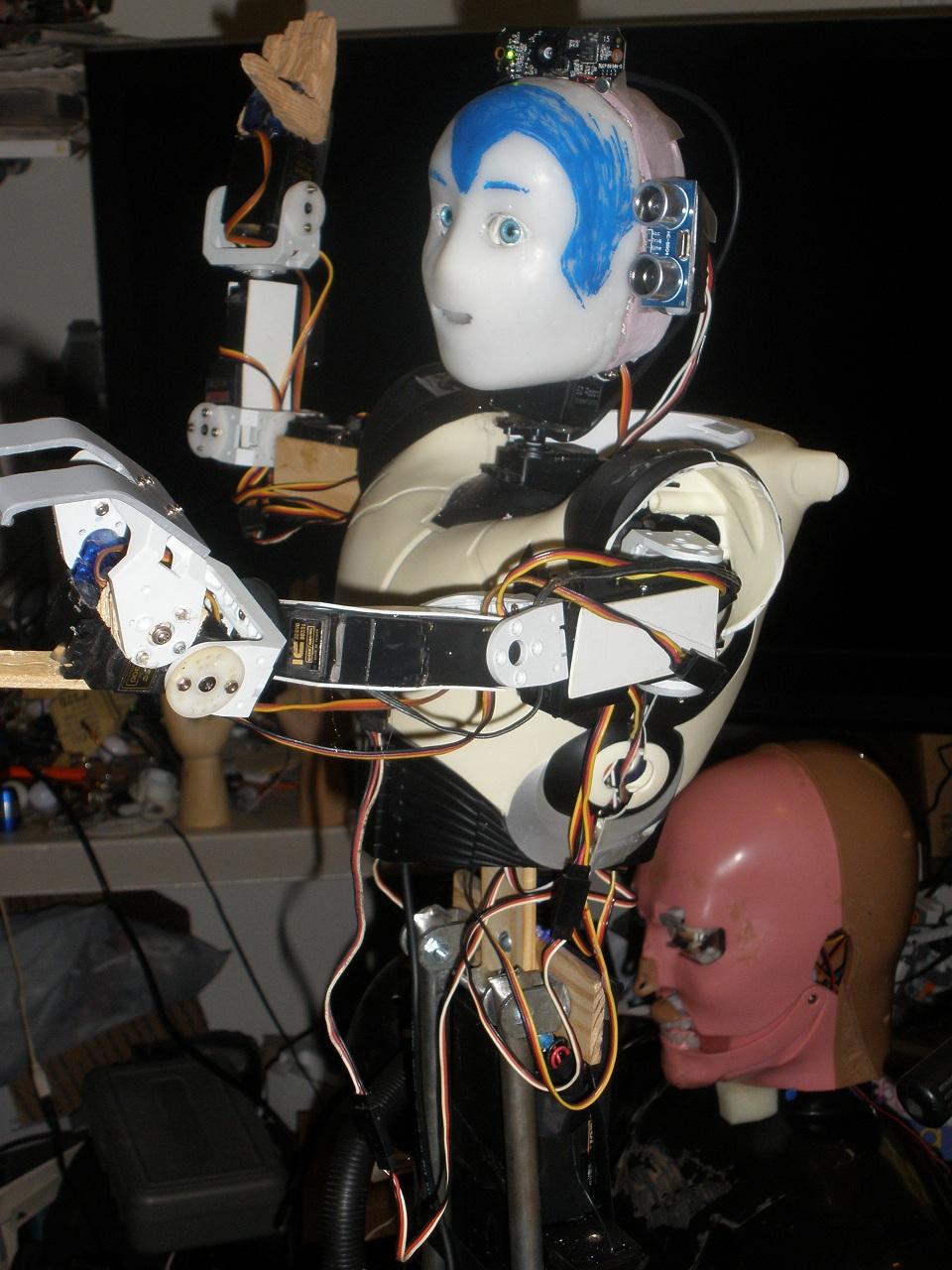
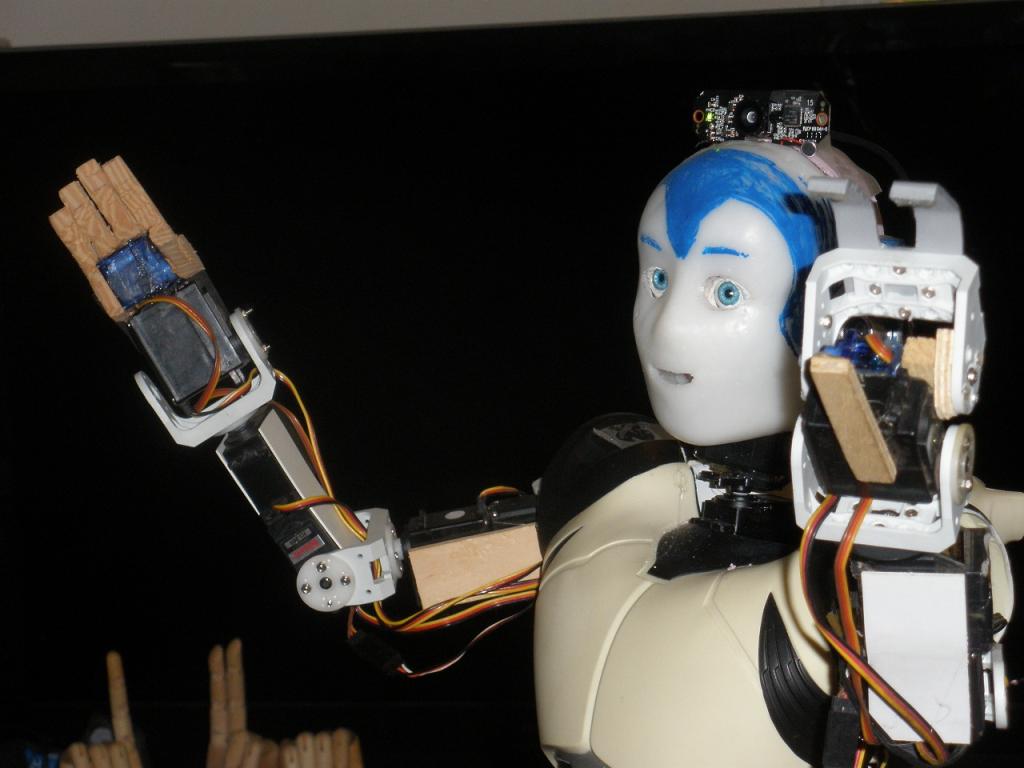
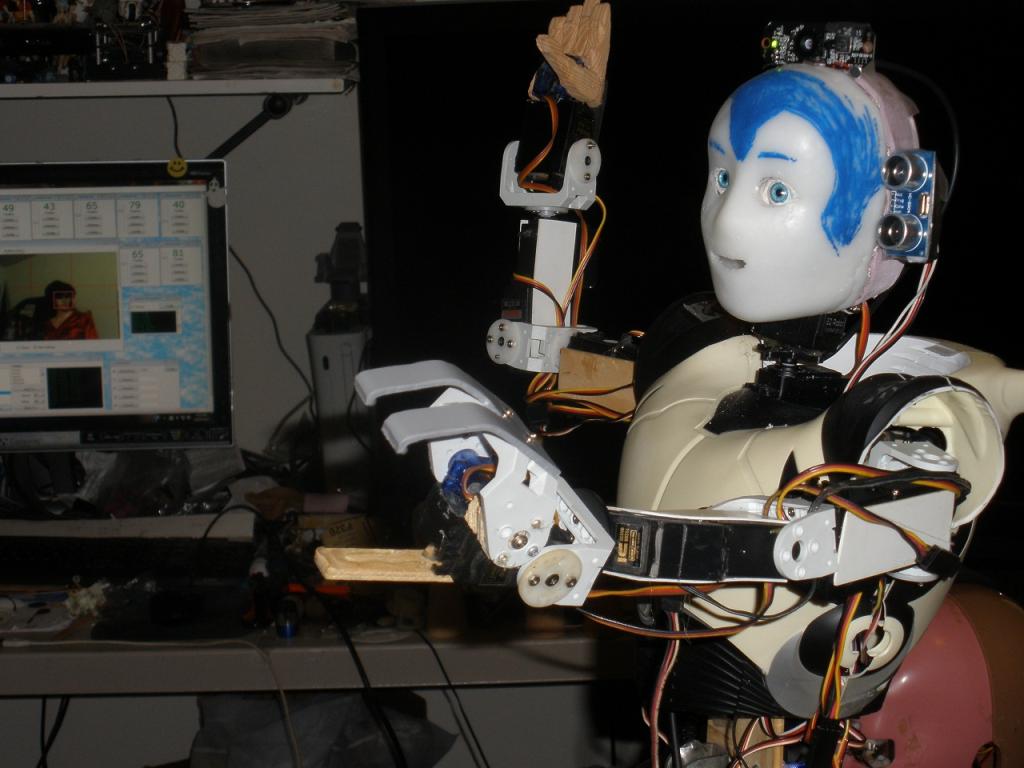
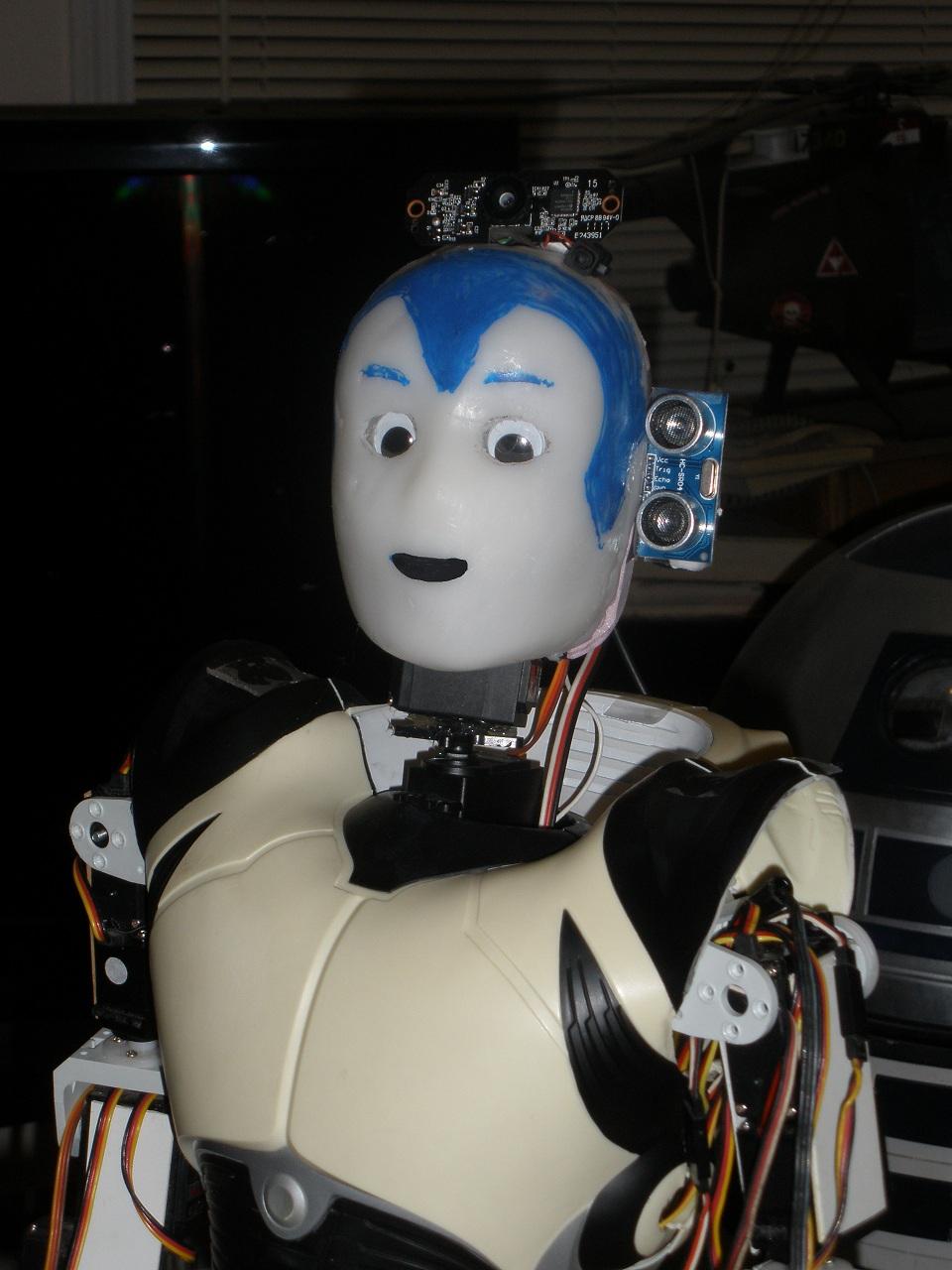
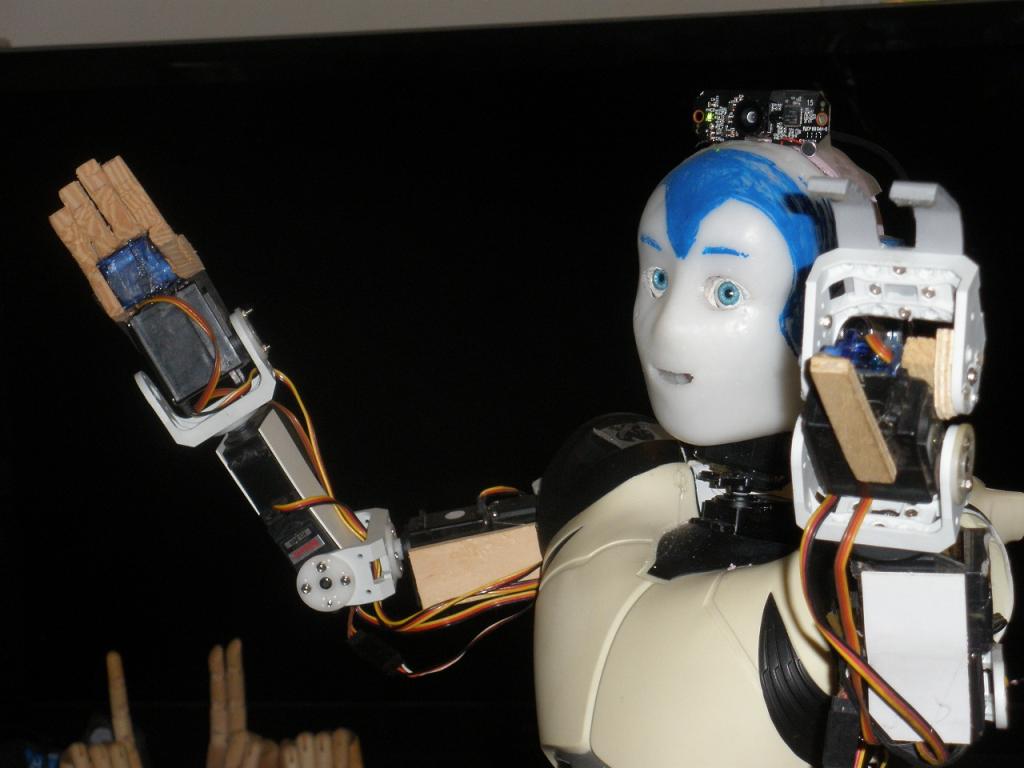
The problem was using regular servos and none of the numbers were too high or low, so I redid the poses that didn't work, got rid of the non working poses and then renamed the new poses the names they replaced. All kinds of fun, but it worked. I am also glad I found the tip to multiply all of the servo positions by 1.8 so they would work with the V4 board. I thought I had to redo every pose to the home position and then remake all of the poses. If I tried to just adjust each pose from where they were my robot would have broken his arms or something. Now I need to adjust the speed of every Action as they are now too slow. I had changed to more powerful servos in his left arm and needed to adjust some of his poses anyway. Dave now has his EZ-B V4 on his back and his new camera in his head. Dave can also move his eyes left and right now. His voice now comes from his EZ-B speaker now except when he tells a joke or the weather. I haven't figured that part out yet. Dave's servos are a bit too much for his rechargeable battery, so I need something with more mah. I might be selling an old robotic Elvis made by Wow Wee. He works great, I just don't have room for 2 of them. He comes with his remote and the song cartridge that came with him.
Been having fun with my MPU6050 gyro,accelerometer, temp sensor. Now I need to add it to my robot Dave. This thing works!
Dave has had some updates. Video soon I hope. I got a light sword from a dollar store and changed the single LED for a set of 5 and added my own push button switch to make a light saber for Dave. Looks like Dave needs a little work on his back before I make any new videos. Something came loose on the inside. Back problems already and he is still so young.
Dave is looking sharp. I picked up some of those light sabers from the dollar store too a while back.
Dave is looking great I love the legs can he walk. Also Yoda and R2-D2 are they robotic as well. Looking forward to the video.
PS I hope you have Workmen's Comp. for Dave which I never knew robots could get back problems lol
Dave won't be walking for a while. His legs are not motorized yet. I also need to get him to ballance. He does have a gyro now.