













































By David mcsdaver
— Last update
Discover more robots
Jp15sil24's Samantha
Synthiam ARC powers Samantha, a humanoid robot with Python voice control, servo movement, sensors, face tracking, and...

Ezang's Robot Head Moves With Voice Commands And Voice...
Robot head moves with voice commands and gives voice responses for interactive, hands-free control
Redzone's 2Nd Inmoov Build
Second InMoov build assembling right forearm and fingers, choosing fingertip sensors or a hand proximity sensor to...

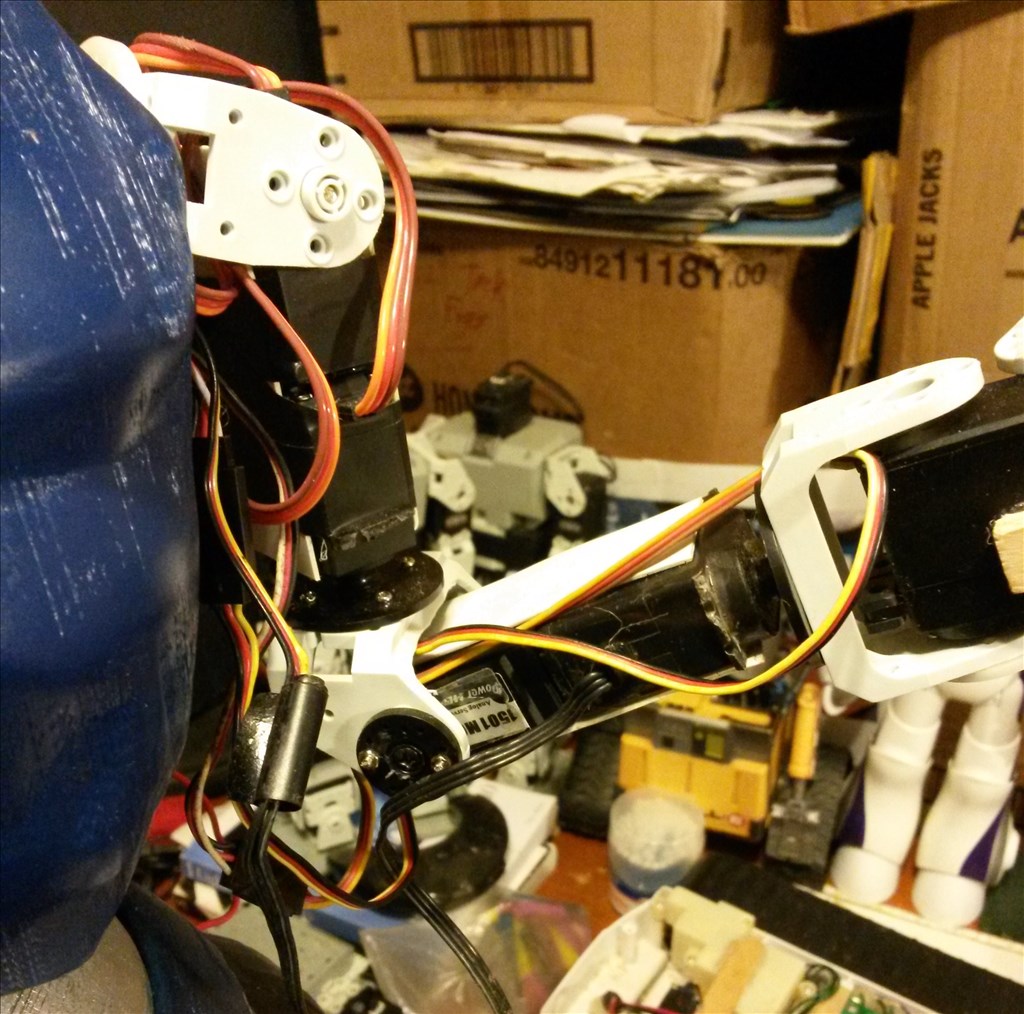
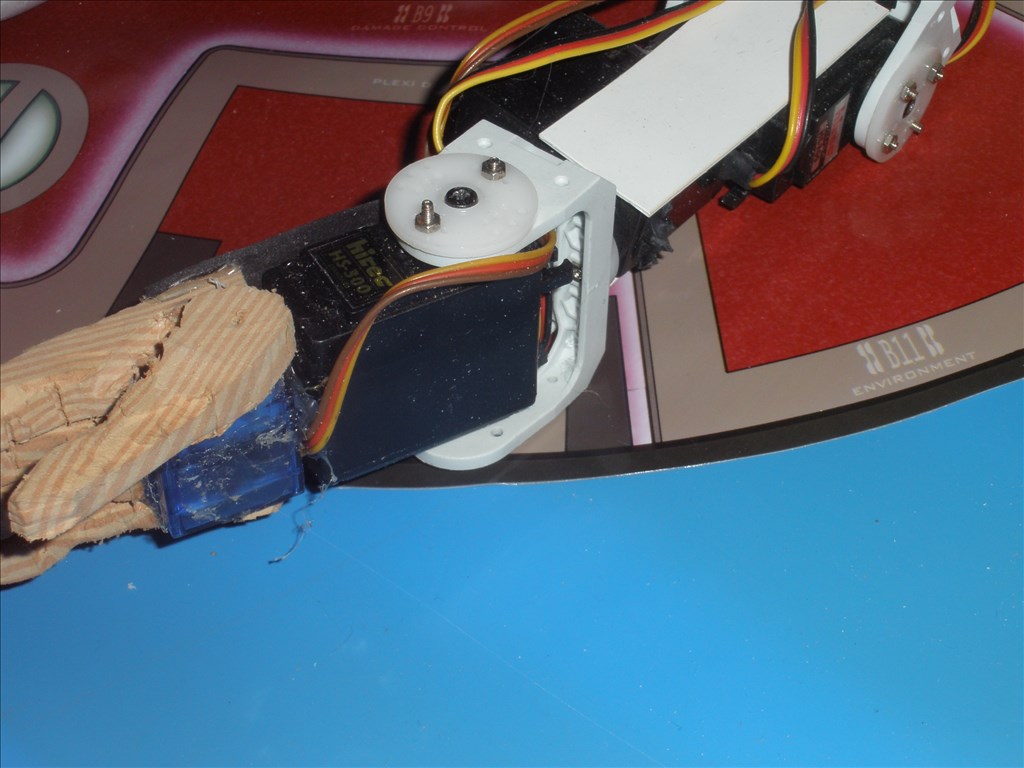
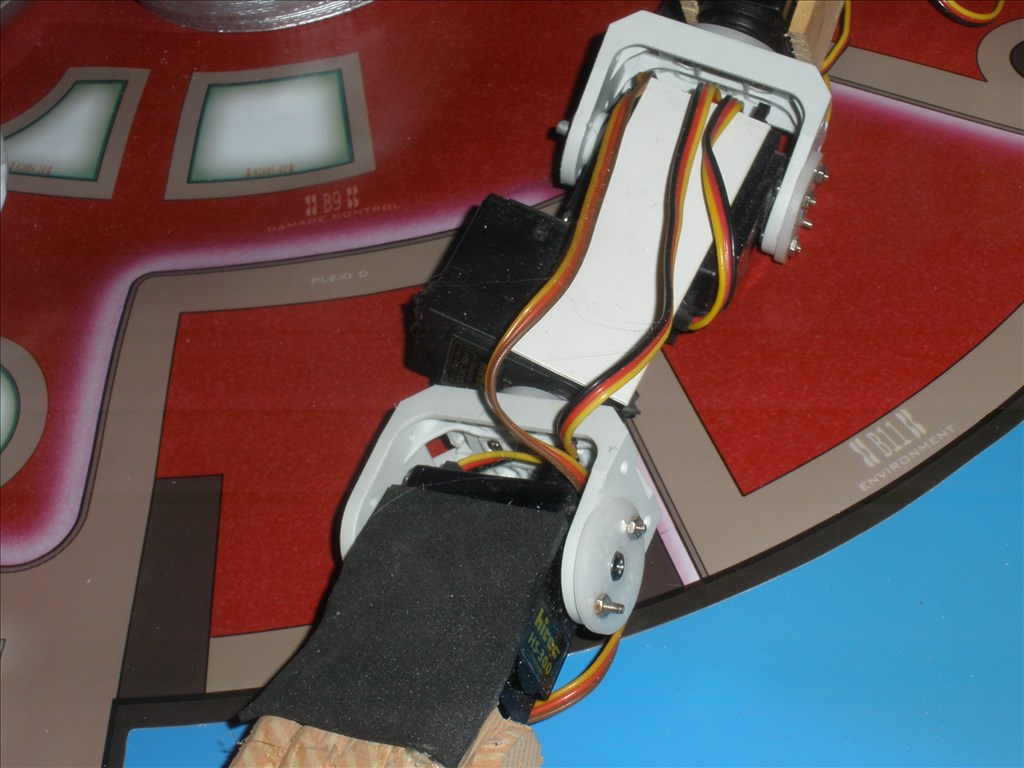
Hey guys just note that when using third party MPU-6050 boards you may have to use stronger pull-up resistors to ensure I2C communication is stable. You don't have to modify the surface mount resistors, you can always wire in some through-hole resistors to an open I2C port, like this:
I'd suggest using 1Kohm (or lower) resistors.
Edit: I forgot to mention that I2C is a parallel communication bus so anywhere you place pullup resistors on the SDA and SCL lines the entire bus will get pulled up.
I thought it had pullup resistors built in? It looked like JD just had wires going from the ports to the gyro. Anyone try this yet?
@mcsdaver... The MPU-6050 that DJ was using was a custom board that Jeremie had designed that's why it plugs directly into an I2C port of the ezb... Plug and play... These will be in the ez robot store very shortly....
Thanks @RR,
That is exactly right. Third party MPU-6050 boards will likely have pullups included but they may not be strong enough (low enough resistance) to prevent I2C lockup.
The MMA7455 would need the same pullup resistors also? I have a MMA7455 and I haven't got it to work yet. It does light up but nothing works if the control for the MMA7455 is unpaused.
Recently I was able to get good reliability with the MMA7455 by using 1Kohm pullup resistors and 100pF capacitors to GND on the SDA and SCL lines. That accelerometer is a rare case where capacitance needs to be added to the I2C bus.
Thanks! I was wondering why I couldn't get it to work. I might just wait on the MPU6050. I have other things to work on right now.
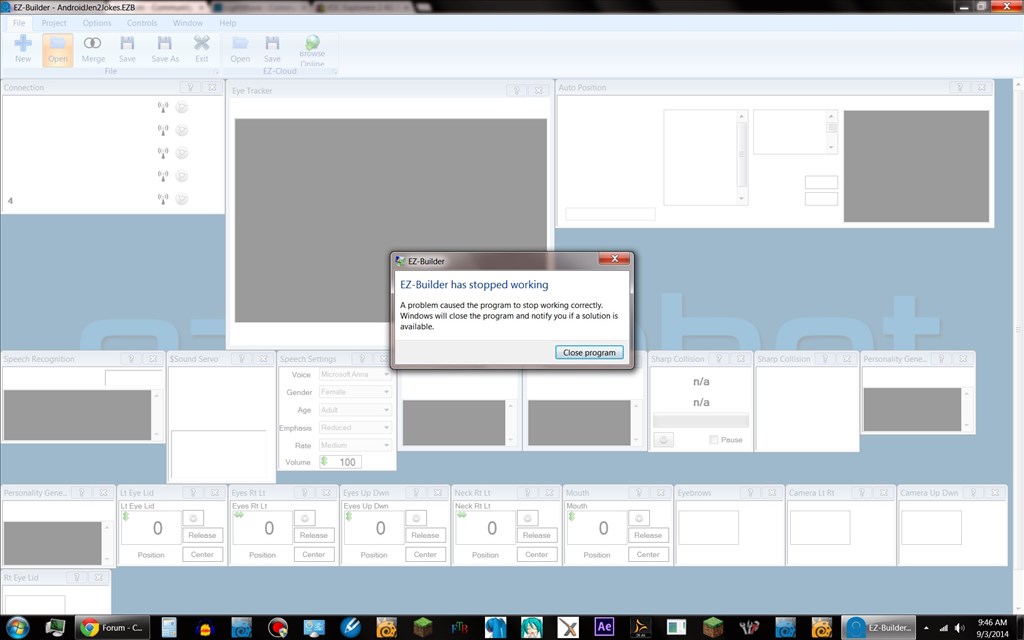
3/28/2015 5:39 PM - Auto Position Thread Error: System.IndexOutOfRangeException: Index was outside the bounds of the array. at EZ_B.AutoPosition.(Object )
Anyone know what this error could mean or how to get rid of it? Some of my saved poses now give this error and no longer move my robot to that pose. Without poses the Auto Position wont work. This error is given when I try to use those non working poses. They worked fine before.