













































By David mcsdaver
— Last update
Discover more robots
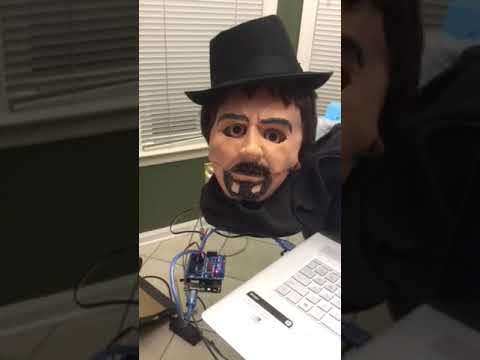
Ezang's New Mr. Roman - Happy New Year 2020
Arduino and EZ-Builder for New Year 2020 projects

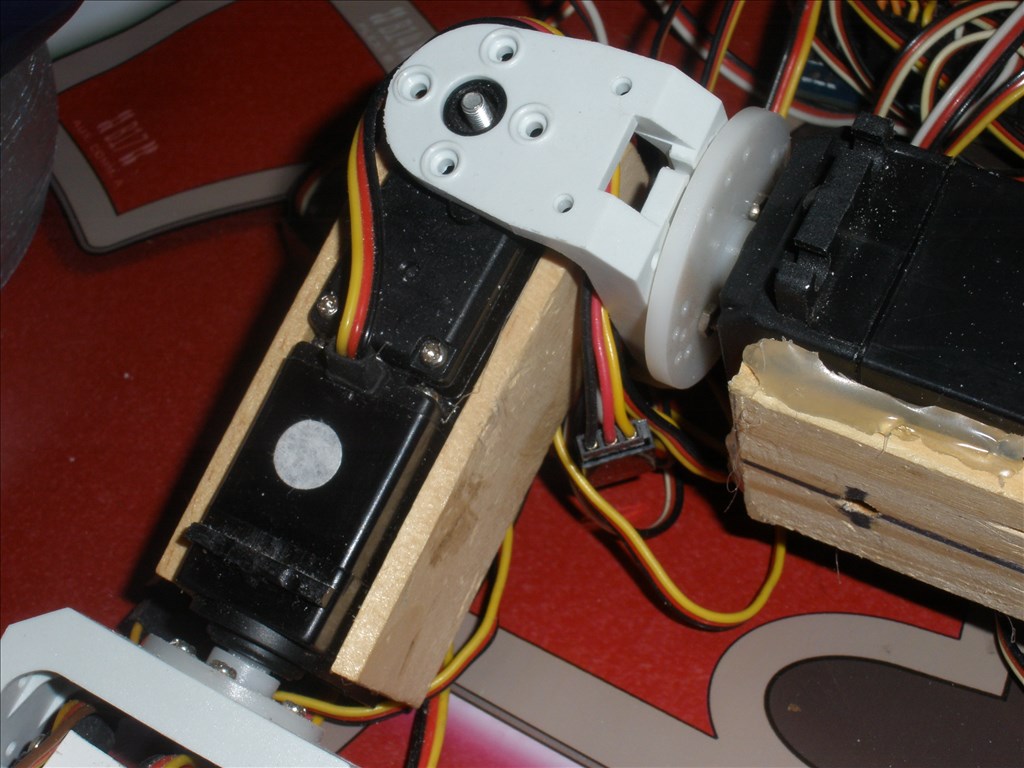
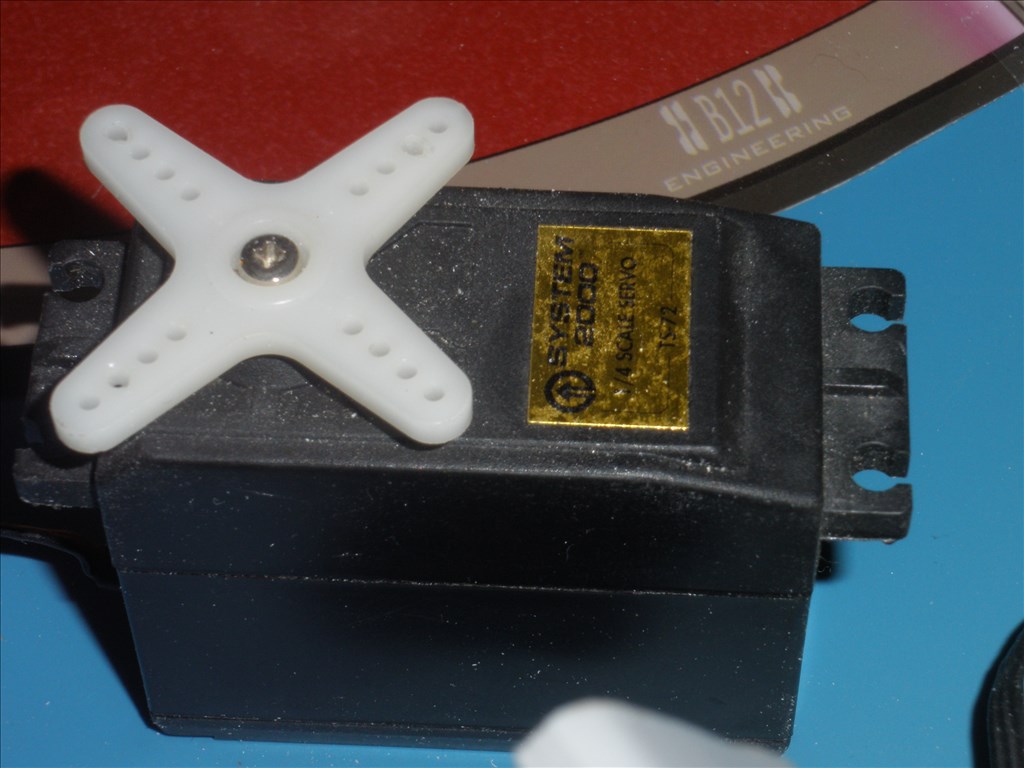
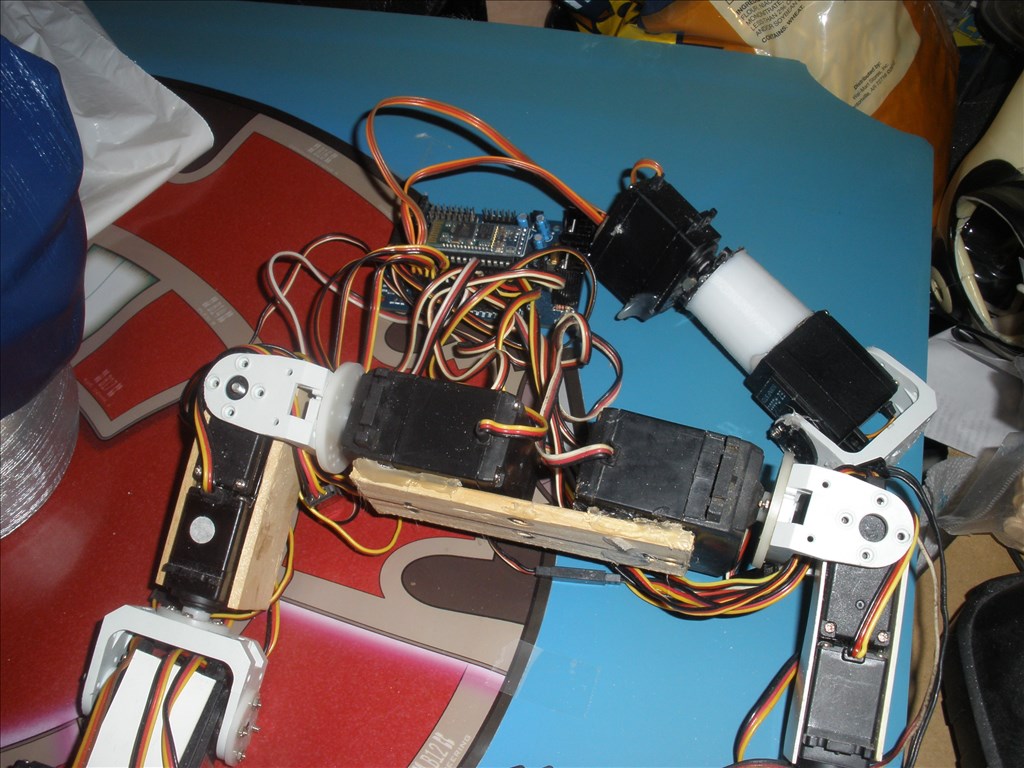
Steve's Mini 6 Fabricated Robot
Mini Six EZ Robot with EZB3, micro servos and custom aluminum brackets - compact DIY build with Bluetooth speaker audio...
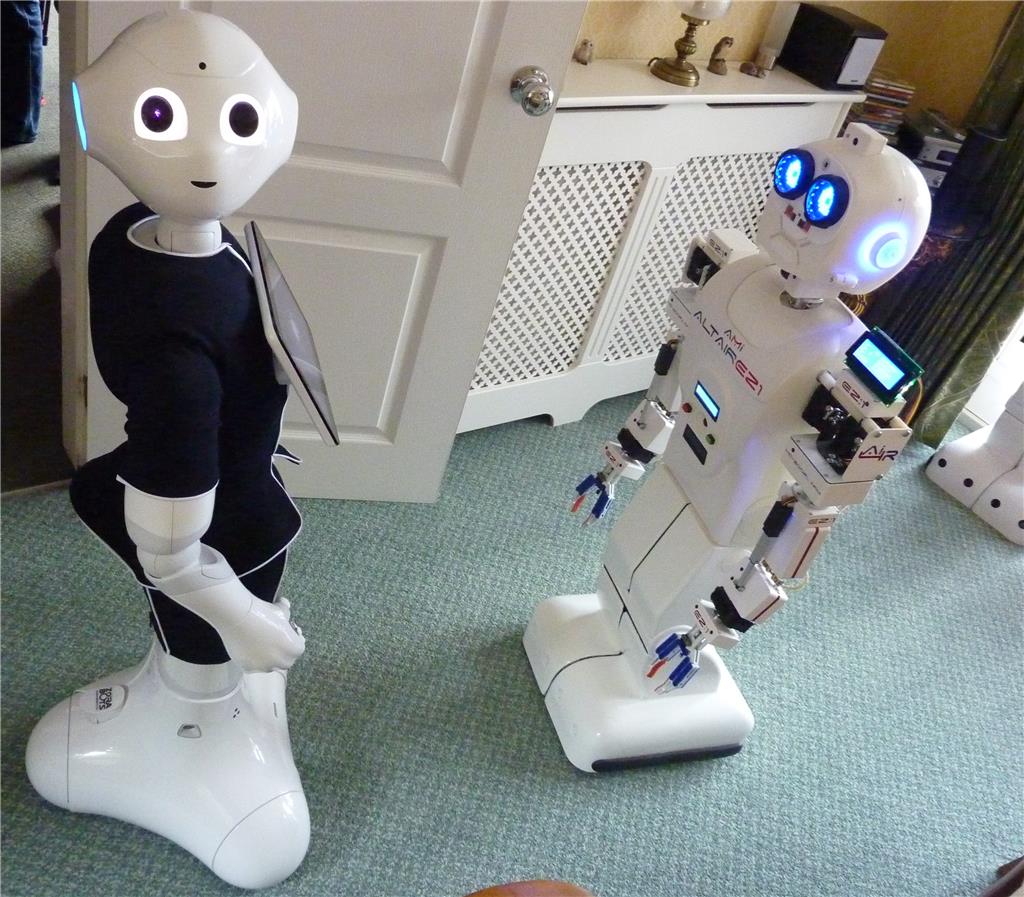
Toymaker's When The Altair Ez:1 Met Pepper
ALTAIR EZ:1 meets Pepper robot for a European documentary; film crew captures their friendly interactions and 'bot...

Cool.
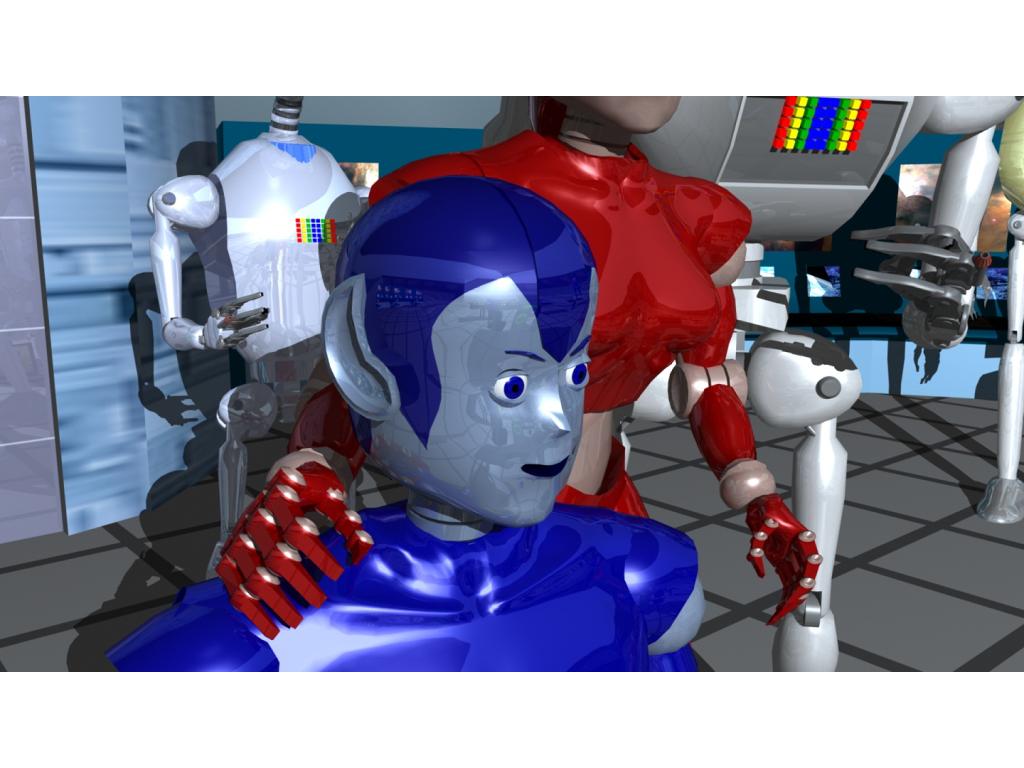
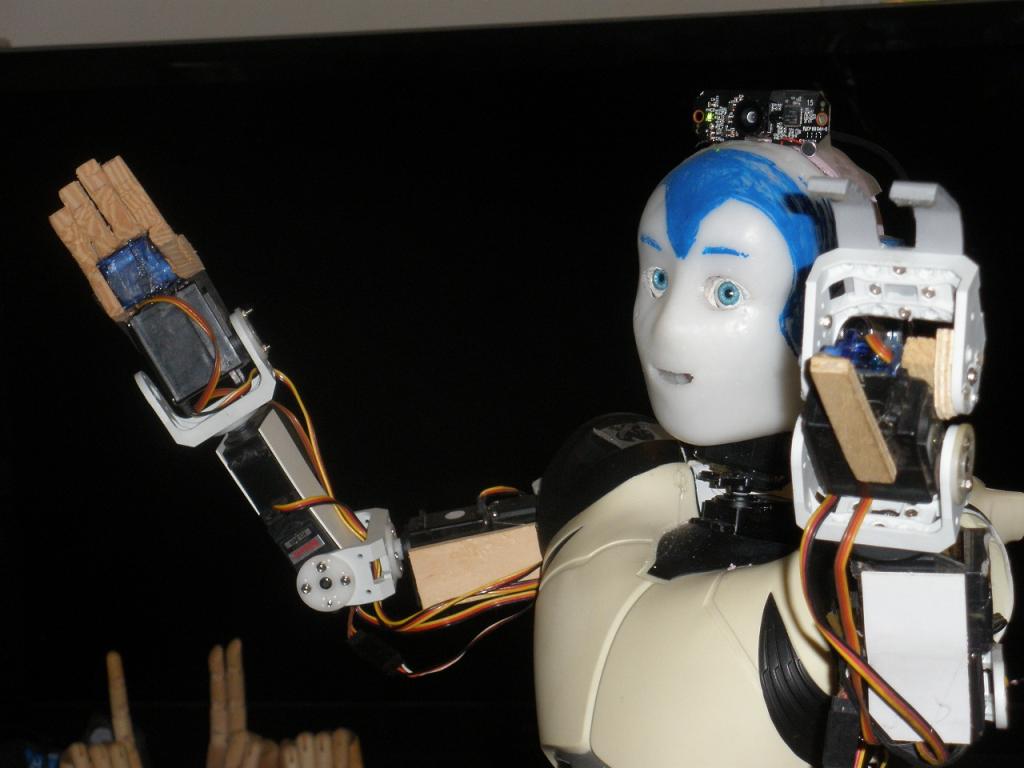
Until he can walk on his own I will have a command chair with tracks (RAD base) for him to ride in. I need to build his chair and models of his friends. I hope with posters, models and my robot to promote my Micro Explorers book. I need to finish the book too. These are all my original art work. I built these robots in LightWave 3d. They can walk and wave and make faces.
tell me when the book is done i would love to read it!
I will let everyone know. I have tons of writing and artwork to do to get it done. But I want to get this robot built too.
Seems like the RAD robot would work well to make a replica of a robot from a Saturday morning show called Space Academy or something like that. It was a RC controlled robot and looked cool. Not sure what his name was.
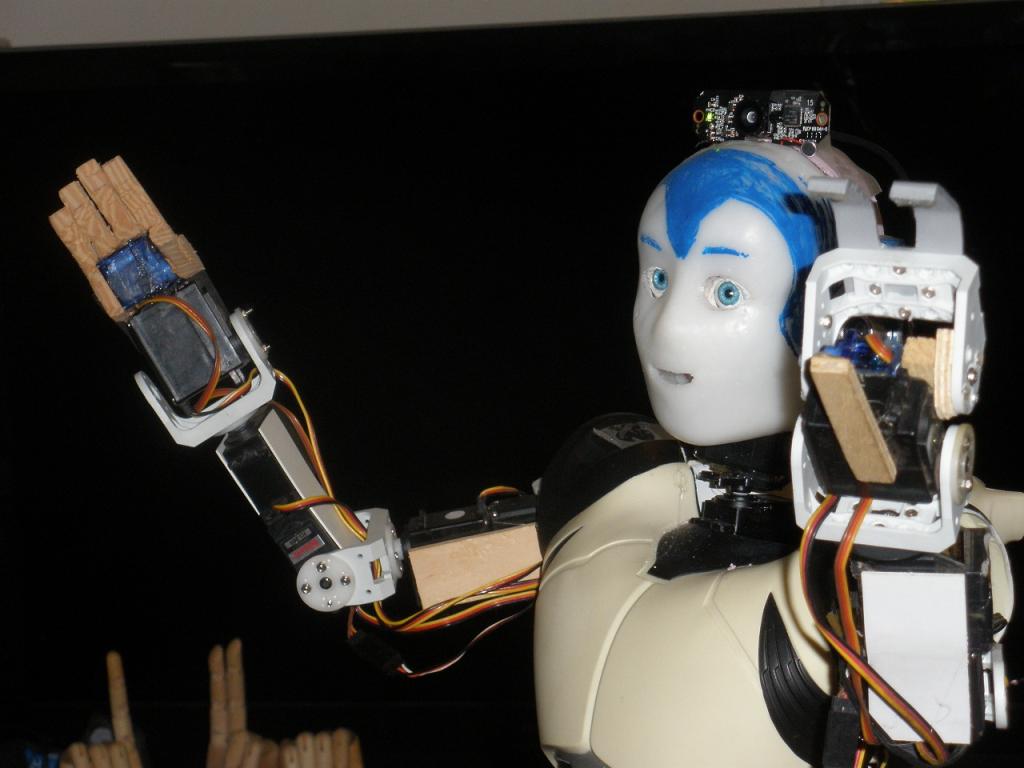
thats pretty cool hope you get his head built soon
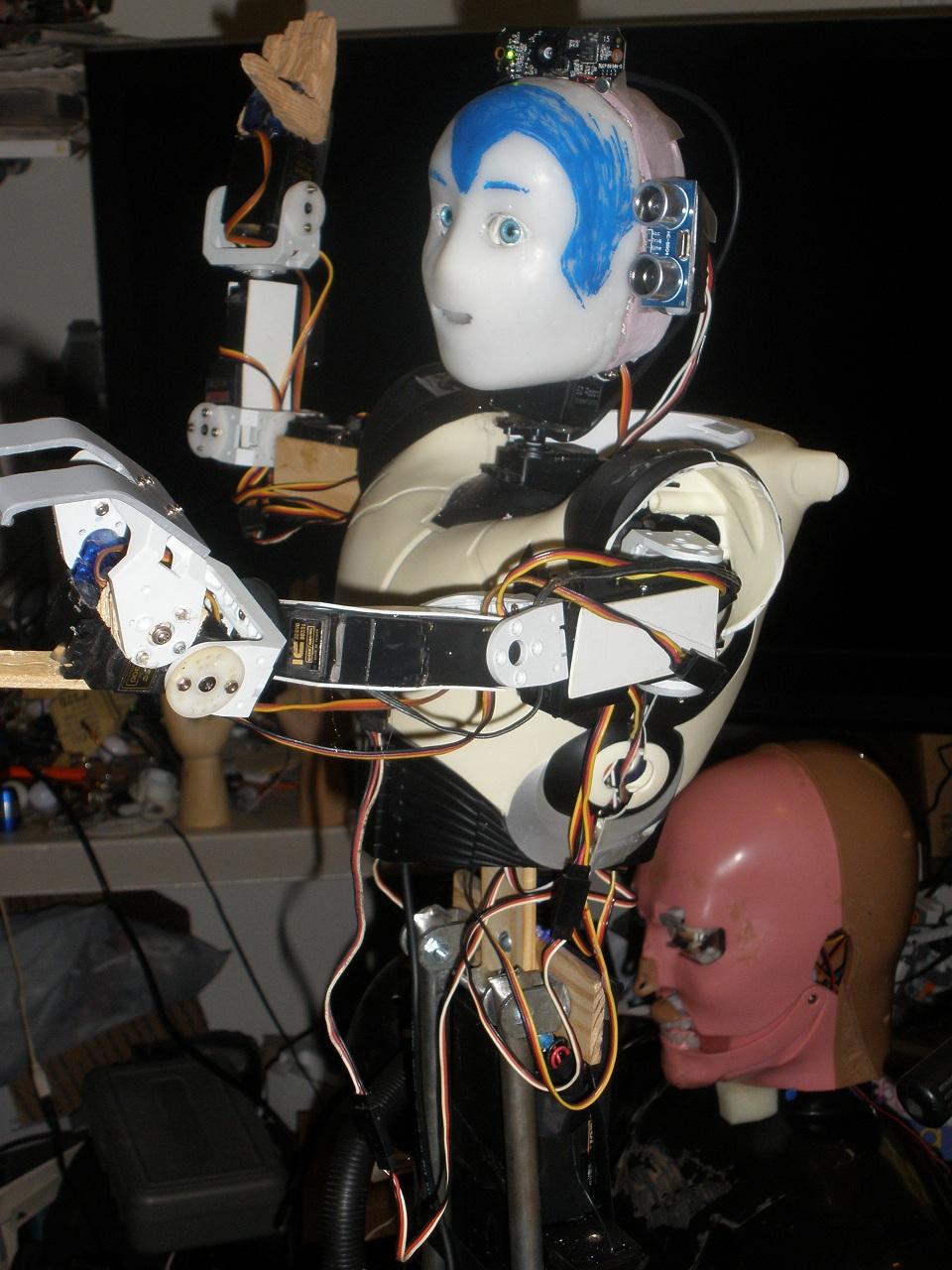
Me too. Made a head with Sculpey then made a rubber mold and then poured some resin in and it is taking a long time to harden. Plus I want the head to be hollow so I am trying to just coat the inside and not fill it up. This is all new to me. I think I might bake the Sculpey and use vacuum form to make the head. I wanted to build a vacuum form table anyway. Then his arm and leg covers could be light.
I got my B9 robot today, now he needs a front leg panel. I made a fast one out of foam until he gets something better.