













































By David mcsdaver
— Last update
Discover more robots

Jeremie's Ravage The VHS Tape Robot
G1 Transformers-inspired Ravage VHS tape robot with EZ-B IoTiny, 360 servos, LiPo battery and fold-down stand for...

DJ's Wii Remote Controlled Robot
Control Wall-E in Synthiam ARC with enhanced Wiimote support and EZ-Scriptable buttons, plus a tutorial video

Ezang's Mr. Metal Again 2021 - Made From Servo City Parts -...
Greeting from Mr. Metal wishing everyone well and announcing a body move soon - signed EzAng

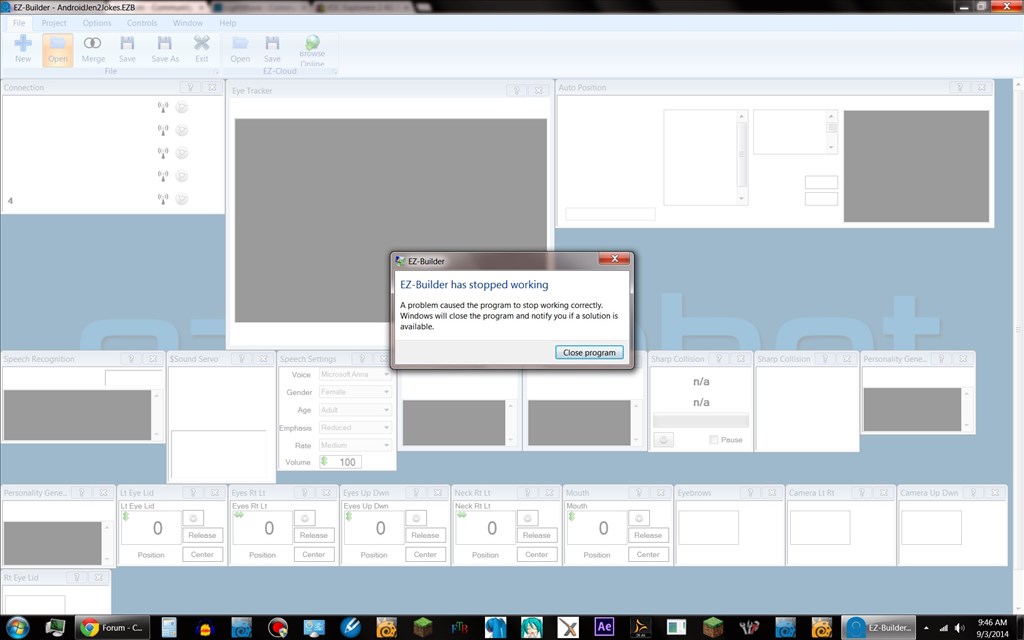
He was working great and I added rest commands so he wouldn't over heat. This made him able to last much longer with no problems. Now I can't load his projects anymore. I have found a very old project and edited the Auto Position commands so they would work, and I can save the project, but it is missing everything I have added in the last 6 months. Plus it looks like the edit to fix the old problem is the same thing I had to do before and now those projects don't work anymore.
How do I load one command line at a time?
Open a new ARC file.... select Merge file.... Choose the file that is crashing ARC... next a screen will pop up asking you to select the controls and scripts you like to carry over from the old file to the new one....
Thank Richard. Merge can save lives, thanks so very much Richard. Now I need to fix his older problem, moving too fast. Not sure how the speed control works for these servos. I want smooth and fast, but not servo breaking fast, already lost one arm servo.
The servo Speed command is:
I had him moving smooth and now he is moving full speed. I have no idea how to make him slow down.
If 10 is the slowest then how do you ServoSpeed(D14, 25)? How does that work? I have seen it show up to 70! I have a bad cold and thinking isn't going very well. My robot is moving way too fast right now.
@mcsdaver... Are we talking regular 180 deg servos or CR Servos (continuous rotation) here? Also remember v3 uses 1 - 100 servo positions and the V4 uses 1 - 180 positions...