
HI, i am looking forward to have a 4 ft tall robot ...may i please know is it possible to increase the height of the robot uptill 4 ft
By gau098
— Last update
Discover more robots

Ezang's Let's Have Some JD Robot With Voice Commands
JD robot voice control with left-right head movement for natural, responsive interactions

Oakmot's Chloe Project
Home mannequin robot using EZ-B servos, camera face-tracking and Synthiam ARC control with DC power, arm plans, and...
Jdebay's Gripperv4 Old Parts And New Parts
Build Gripper V4 from old and new parts; updated design now includes an added camera.

Which robot? Do you have one in mind or do you want to make your own? You can design a robot to be pretty much any size, however the bigger it gets the stronger it will need to be... You'll need larger motors and servos, stronger frame, bigger batteries etc.... also cost will increase accordingly as well....
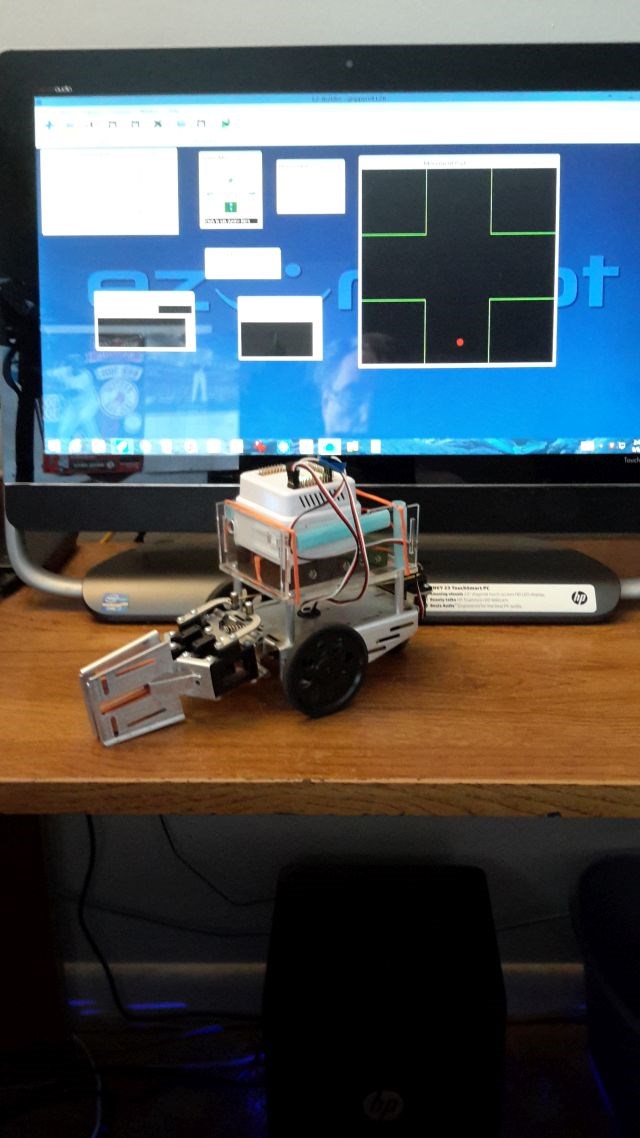
Here is a good example of 4ft high robot...
@richard: i am looking out to make the above robot exactly same looking but of 4ft tall ..and also some more features like talking in a more robotic way ..instead of sounding like recorded audio
@rb550f: it seems good but i am looking out to make two legged humonoid kind of ..totally humonoid ..
You'll have to make it yourself... If you have a 3d printer you can increase the % size of all the STL files.... However you will need bigger servos as well.... Or you can custom make one that looks similar to JD.... You can also add different voices to your PC... Cereproc is a one company that make 3rd party windows voices... There is no off the shelf solution I am afraid... By the way, you are going to have a lot of trouble getting a 4ft tall humanoid to walk....
Imagine the size of those feet at 4' tall
Sorry to disappoint, but simply making JD larger is physically impossible, or atleast incredibly difficult. However, if you want a big paperweight, then crank those .stls up all you want
Humanoids don't scale well - a design that works well at 1 foot tall will probably be unstable or completely unusable at 4 feet, since you have to factor in all of the changing variables (like center of mass and gravity)
Not to mention the cost of the servos required to move such a large body. The reason why cheap hobbiest robots are so cheap is because, due to their small size, lower torque servos can be used to shift their relatively small mass. Even using the best hobbiest servos money could buy would probably be unable to even keep the robot on its feet, much less making it able to walk. Expect to pay upwards of 10,000 USD or more if you want to do this, or more if you want to actually make it function.
To be honest, I don't know why people attempt to build these huge humanoids - there's a reason why only giant, multi-billion dollar corporations are able to build them correctly
For the challenge it presents. At least that's a large part of why I have been designing a 6 foot biped (which, by the way, needs a heck of a lot of torque in it's servos, needs strong/lightweight material such as carbon fibre, not something that's affordable to many!)
@rich
but you're taking time to come up with a tangible design and are (probably) willing to spend the money needed to do so. People like OP simply want to scale up JD.
Also; show us what you've been working on some time, I wanna see what genius you're putting into what will obviously be a pretty great design