

Hello everyone!
My EZ-B came in little over a week ago. The delivery time was great, no problems.
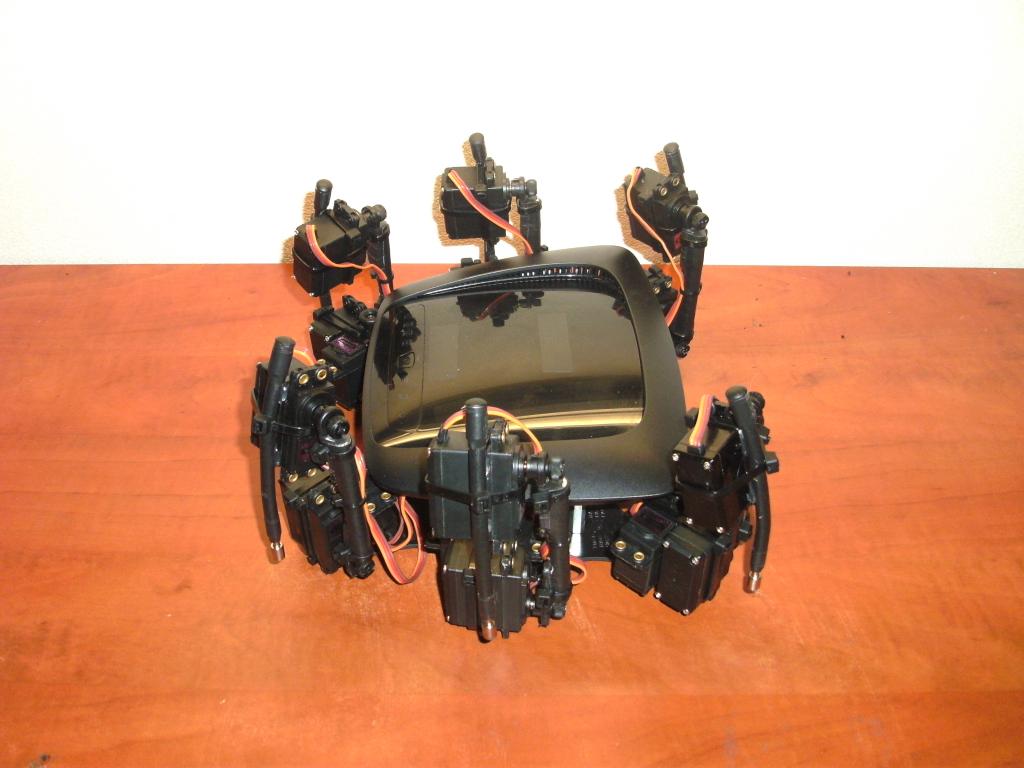
it came in just fine and on time. So I started building my hexapod robot,
I call it 'Hank'. 
He is made out of an old Cisco E1000 wireless router I had laying around.
Its got 6 legs, each using 3 high torque servo's (18 servo's total). Its got
one ultrasonic ping sensor mounted staticly without any servo's. So all 20
digital ports are taken. 2 for the sensor, 18 for the legs. I will have to say
that the board does indeed brown out fairly quickly, even with the use of
the table powersupply I ordered with the EZ-B. So alternate power for the
servo's is a must. If anyone could show me a picture of where to cut the
proper leads on the board for an external battery source, I would really
appreciate it very much, as I do not want to damage anything.
Allthough I have begun compiling some scripts for centering the legs and forward movement, it can't rightly stand nor walk by itself yet without browning out almost instantaniously. I also notice that while compiling the scripts, the command for 'servospeed' does not seem to affect the speed at all. Maybe this is due to the use of high torque servo's, I'm not sure, but the servo's seemingly keep running full power and obviously Hank is one hyper robot, lol. But it uses a lot of power too, anyone have any ideas of how or why I cant seem to slow it down? Ive tried combining it with the 'sleep' command for several seconds but it will infact just wait that time untill whipping out the next movement with full speed. I need to slow that down somehow.
Obviously, this is just a quick mock-up and it needs a lot of improvement. Allthough the frame is basically as it is, the legs ive slapped together outof some aluminium tubes and are hot glued onto the servo mountings. The included plastic servo mountings are quite soft and with the tubes glued like this, the legs bend and wobble easily and do not offer enough support to stand on. the outer legs ive just hotglued on a tie-wrap that is wrapped around their servo. I have ordered black acrylicglass but am still waiting for it to arrive. When it does, i will begin finalising the legs properly and possibly include the lower base of the frame. The router casing needs some final touches too. On the back it has a connect button and the led indication symbols. I intend to place 2 leds and switches for the batteries under the 1st and 2nd network symbols, and possibly attach some optic fiber cable to light up the power symbol on the left using either led on the board. I was also thinking of possibly placing 2 solar panels on its back to provide both batteries with a little extra charge. I am still looking for a suitable battery for the servo's, as this will need enough amps to feed all the servo's, without being too large and will not exceed 6v. though some datasheets for the servo's show 4.8v - 7.2v range, would a 7.2v battery not be too much for the servo's?
Well anyway, Ive attached some pics. I hope you guys like it. Though keep in mind
that the legs are temporary so I could begin making some simple scripts untill I receive the acrylic glass lol.





Thanks, DJ Sures! I'm really enjoying EZ-B, with ARC I can easily set up some basic
scripts without any scripting knoledge and control it with my wireless 360 controller.
It's awesome! (oh, and I got a red LED on my board!)
Kristian.
Discover more robots

Lumpy's Lumpy's - R2-D2 Build Two-Two's

Tachyon's First Robot


OMG i see my router walking away. Thats so cool!
My router died last weekend but when i saw this Nice idea
Nice idea
Dat heb je echt mooi gedaan zeg!
Ha! That's awesome
It kind of creeps me out. I Love It!!!!!
awesome bot love to see a video of it running
Yes please show a video! I'm super interested
Outstanding..that really looks great! Can't wait to see more of it and some of the movement scripts you come up with! I would guess the multiservo function DJ just added will be very handy!
Wow! That is awesome! I'd really like to see a video of it walking!
Can you upload a video!!!????? and that is awesome!! I want to see how to work your robot!!