





























































































-635353562186322812.png)




















































































































































Hi all,
I'd like to share a video I just took of my full size Lost in Space B9 robot that's controlled by two EZ-B controller boards. Right now they are controlling limited movement and voice response of a few motors, lights and sound files played from a Sparkfun MP3 Trigger board. Although I'm just starting with the animation and have more building on the actual robot the result (mostly thanks to the EZ Robot controller board) is shocking. Please have a look at this (4 minute) You Tube vid and enjoy.
Please excuse some Technical camera lighting and sound issues. This is the first time I'd made and posted a vid online.
EDIT 8/2/13: Just realized I have no good pictures of how my B9 will look when complete. Here's one of the actual TV robots from the 60's TZ show Lost in Space and one recent shot of where I'm at with my build over 1 1/2 year after I started. Enjoy:



Thanks, Dave Schulpius
Discover more robots
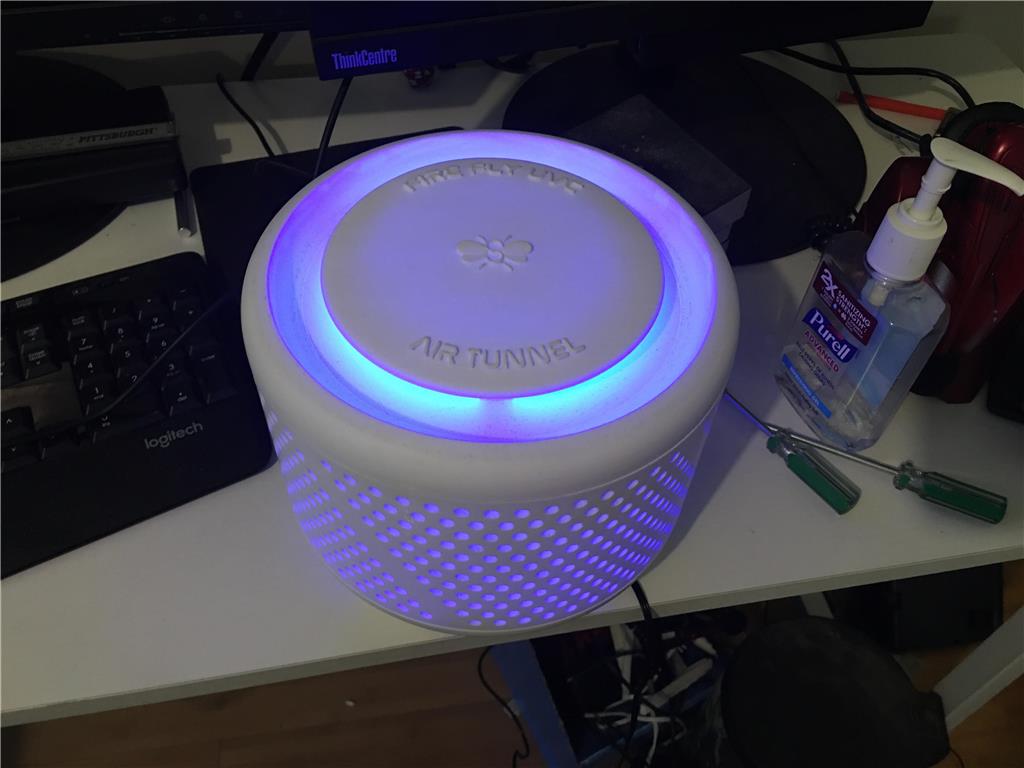
Jstarne1's Air Tunnel Plus Bot The Smartest Way To Kills...
Joesox's CARL

After ironing out a few more wrinkles I was able to find time to take a Video of the Radar and Bubble Lifter working with the help of EZ-B and a few scripts I wrote. Please excuse the ruff movie making skills and it's length. It's almost 9 minutes of YouTube bandwidth in HD but captures most of what I've been able to do thanks to DJ, EZ Robot and the B9 Builders Club. If you have about 10 minutes please take a look and let me know what you think:
Thanks for looking, Dave Schulpius
After I thought I had everything worked out so my Bubble Lifter servo didn't jump and larch at power up it started doing it again. tired Thankfully I found the cause right away. I just had to try to remember what changes I made that may cause it to start up again. Turns out It was in the servo Control Panel I have installed. I had the Min/Max position set to 1 on the Min and 100 on the Max. When ARC started up the default start position goes to 1 in the little window. This caused the servo to jump to the 1 position just before it receives the first position command when the script starts. For example:
I have my servo and horn centered to position 50 in ARC ARC starts and the servo Panel defaults to 1 when I have the Min/Max set to 1 and 100. I send my first command for the servo to move to position 40 The servo will try to move to position 1 and then move to position 40.
The real life result is that the servo will slam to the top of it's rotation (position 1), hold for a second and then move down to position 40. Not good.
Here's my work around. I set the Min in the servo Control panel to 50. That's my center and resting position of my servo and horn. This sets the starting default position to 50 in the window of the servo Control Panel at ARC's startup. This takes away any larch or jump when the servo tries to slam up to the 1 position. In short, the min position needs to be set to my center resting position of my servo.
I don't know if I'm missing something here with this servo control. Any words of wisdom from anyone?confused I don't know why it should default to position 1 at start up. I would think it would go to center. In my case that would be 50 if min/max was set to 1 and 100. I don't really use it anyway other then to see on screen the position the servo is in. My servo is always controlled by scripts. All seems well now so I'm happy.
This project makes me giddy! I hope to someday see this in real life
To understand your servo situation... Is this what happens?
Action
Connect to EZ-B
EZ-Script command Servo(d0, 50)
Result
Absolutely awesome Dave.... I followed every minute of your latest video with intrigue. Your build looks and sounds authentic and that I am sure is high praise from what I can see of the attention to detail!
This is probably old news to you but I have managed to get recognition errors down to a minimum by deliberately scripted by project with limited choices when it comes to voice commands while at the same time opening up a whole lot more....let me explain.
The new voice command display in a recent update gave me the idea of using a menu system like our local Telco voice answering phone menu ...
I have the absolute minimum of entries in the speech recognition panel and instead use the WaitforSpeech command. This lets me listens for specific responses and navigate through a series of menus responses rather than all responses I used to have in the speech recognition panel. This has been greatly improving accuracy. Here's an adaption of one of DJSures examples...
Saywait("System Configuration" ) ControlCommand("Speech Recognition", PhrasesHide) :Response_Menu
Do this loop three times
$Name_Response_Loops=$Name_Response_Loops+1 $Response = WaitForSpeech(10, "Update Location", "Power down", "System standby", "Main Menu" ) IF ($Response = "timeout" ) $Response="nothing" ENDIF IF ($Name_Response_Loops=3) goto (No_Response) ENDIF
Take necessary action according to response
IF ($Response = "Update Location" ) goto(Option 1) ELSEIF ($Response = "Power down" ) goto(Option 2) ELSEIF ($Response = "System standby" ) goto(Option 3) ELSEIF ($Response = "Main Menu" ) goto(Main Menu) ELSEIF ($Response = "timeout" or $Response = "nothing" ) goto (Response_Menu) ElseIF ($Response = "cancelled" ) goto(Cancelled) ENDIF Halt() :Cancelled saywait("Aborting request" ) Halt() :No_Response saywait("I didn't hear you say anything" ) Halt() :Option 1 Say ("Up-date Location command sequence" ) ControlCommand( "Script Manager", ScriptStart, "Menu - Update" ) halt() :Option 2 Say ("Starting Power down sequence" ) ControlCommand( "Script Manager", ScriptStart, "Menu - Powerdown" ) halt() :Option 3 Say ("Entering System stand-by" ) ControlCommand( "Script Manager", ScriptStart, "Menu - Standby" ) goto (Response_Menu) halt() :Main Menu ControlCommand( "Script Manager", ScriptStart, "Menu - Main" ) halt()
To avoid false recognition on key commands I also have a similar script that listens for a confirmation.
$Response = WaitForSpeech(10, "Yes", "No", "Affirmative", "Negative" ) IF ($Response = "timeout" ) $Response="nothing" ENDIF IF ($Name_Response_Loops=3) goto (No_Response) ENDIF
Take necessary action according to response
IF ($Response = "Yes" or $Response="Affirmative" ) goto(Positive) ELSEIF ($Response = "No" or $Response = "Negative" ) goto(Negative) ELSEIF ($Response = "timeout" or $Response = "nothing" ) goto (Response_Menu) ElseIF ($Response = "cancelled" ) goto(Abort) ENDIF Halt()
Hope this helps....
I can't let you do that Dave...
Again absolutely awesome... and the care and attention you have given the build is a great example!
DJ, I would be honored to have you see me B9 in real life someday. Your like the Canadian Wizard OF Oz that has given my Tin Man a heart ( and a brain). You are correct about the servo movement. If I have the min max movement set to 1 and 100 the servo control window will show 1 at ARC startup. If I have a command to move that servo to, let's say 40, it will jump to 1 first then move to 40. I have to set the min to where my servo is centered and at rest. In my case 50. This way when ARC starts I see the 50 position in the servo control window and it will not jump.
Tameion, thanks for the suggestion. I need to study and think your script over. I'm still a little slow on script writing. It sounds like a great to solution. When I'm done I plan on having 100's of phrases. Do you think your script is practical for that many files on the MP3 trigger? Thanks for all the kind words!
Erreul,
My next step is to start building the bubble and brain. This is going to be where I have the third EZB sitting and the tracking camera. Hope I can find the room and make it look good at the same time.
BTW, do you see the rubber boot on top of the radar section? Our very own fxrtst manufactured that. It's part of a set including two arms and legs. You can see the arms in a video I posted earlier in this thread. Amazing quality and workmanship.
Will, if you're reading this, thanks for making my big guy more realistic!