
Hello everyone,
I would like to share the new custom firmware available for EZB 4.
Currently i'm beta testing the firmware fixing and polishing the code.
I'm still open for ideas, please comment.
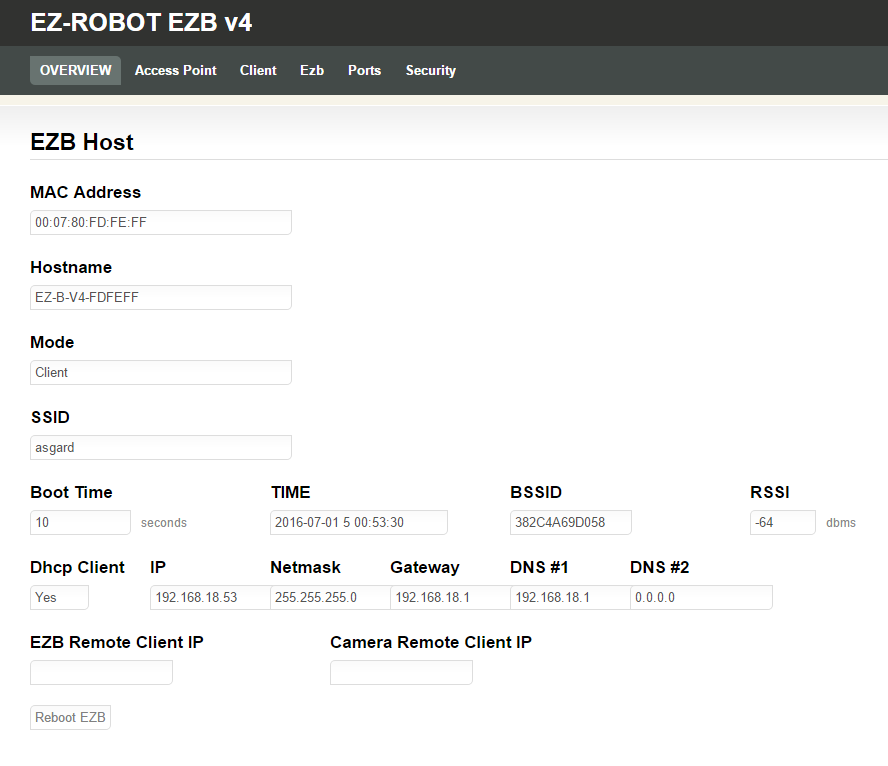
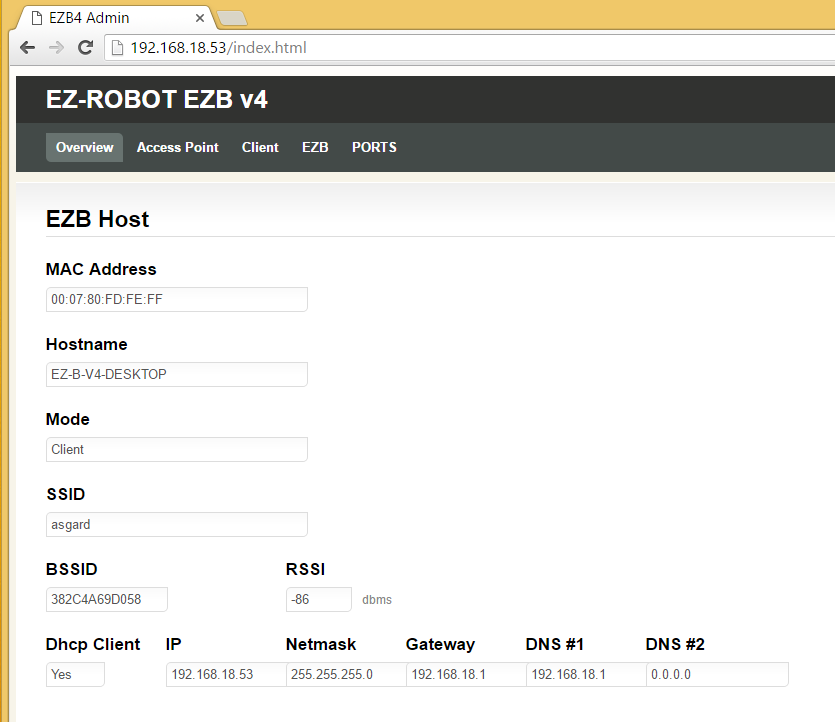
- Initial screen:
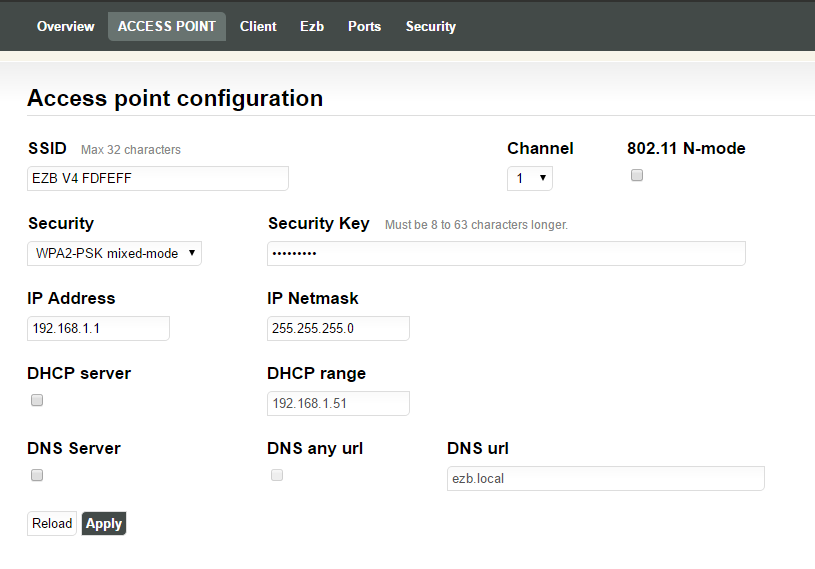
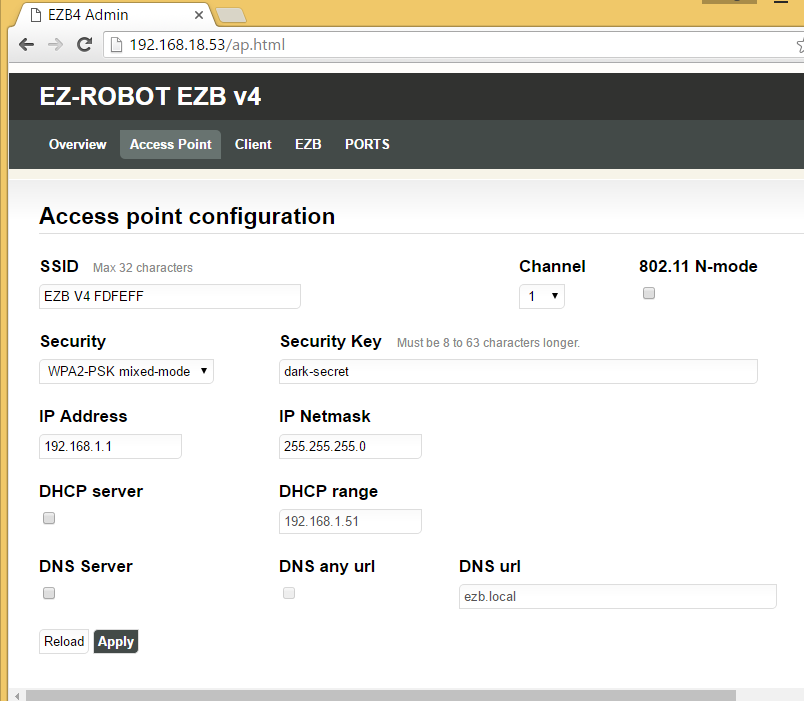
- Access point configuration:
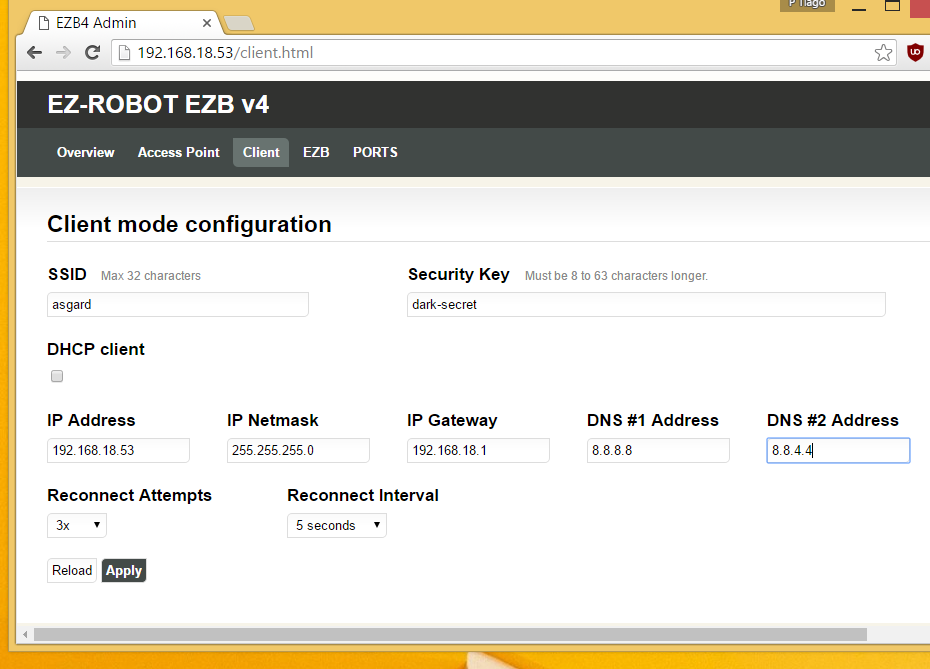
- Client/Station mode configuration:
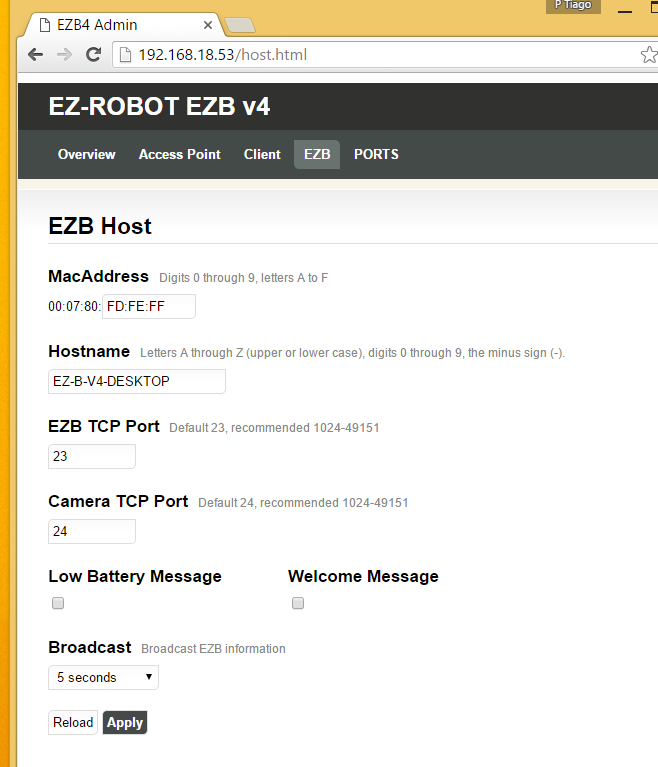
- HOST/EZB configuration:
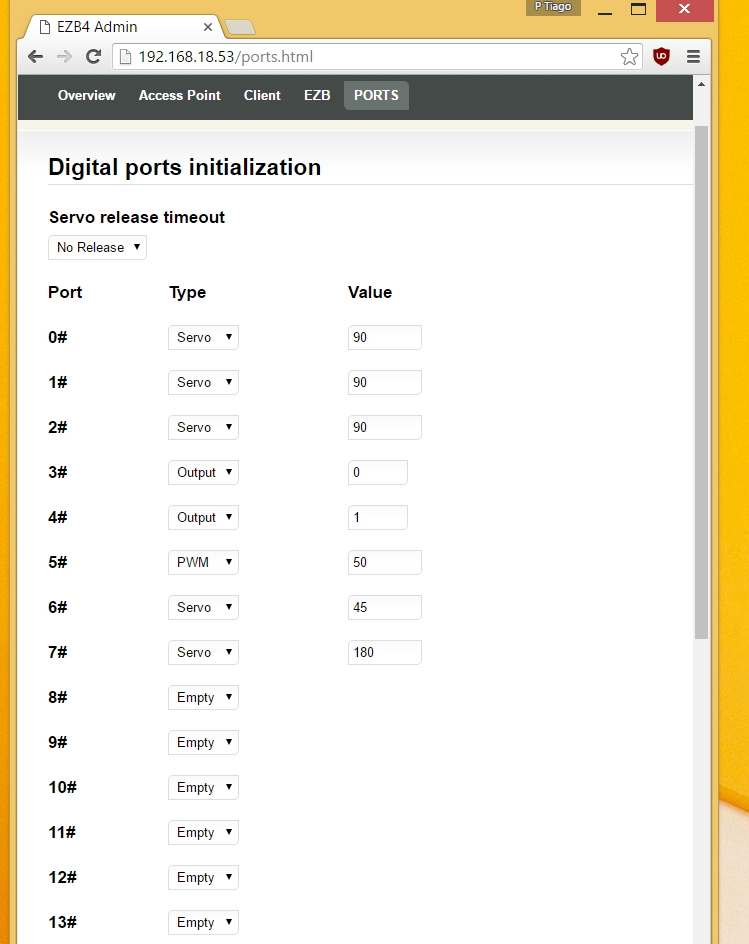
Ports Configuration:
Tools
Working in progress
I will describe in another post the new features.
By ptp
— Last update
Discover more robots
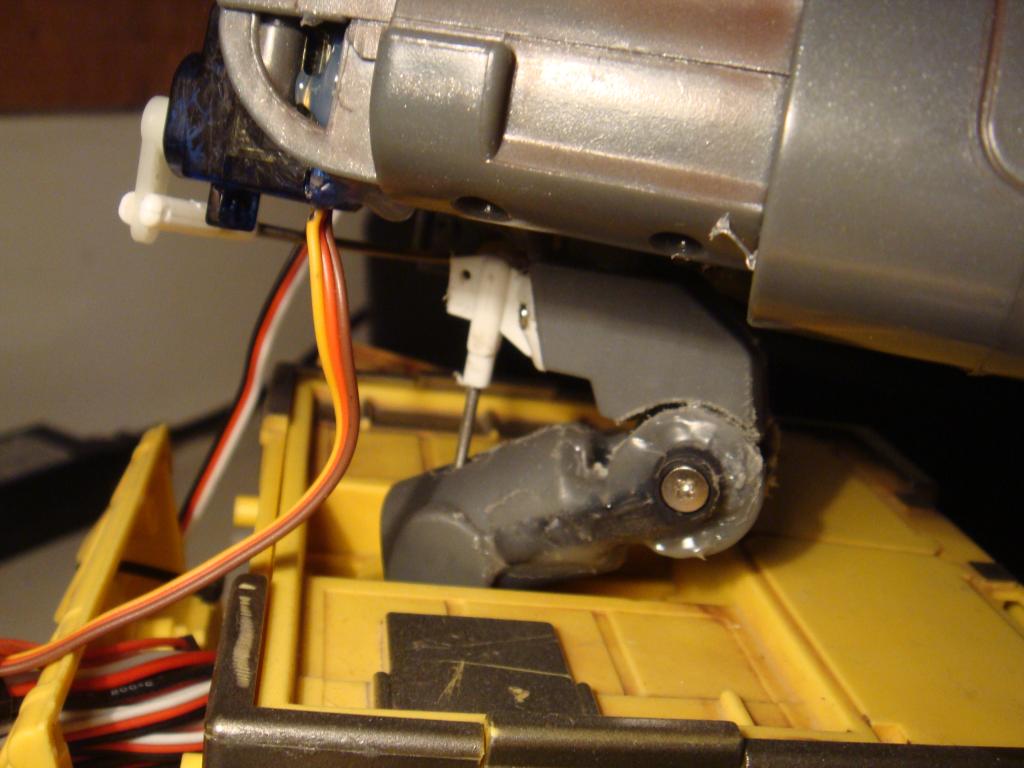
Tombrookyo!'S Another Wall-E But With A Few Different Bits
Wall-E style robot build with servo-driven expressive eyes, hinge neck using a pushrod and stock pivot, ezB on back, I2C...
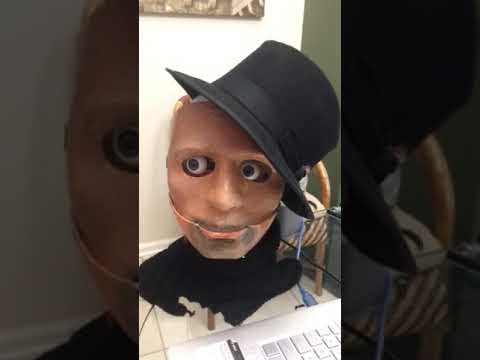
Ezang's New Update Mr. Roman
Roman returns with greetings to Dave Schulpius and others, noting he's from N.Y., may speak fast and asks who looks...
Sudo's Project Shogun
Shogun humanoid: 15in bioloid-based EZ-B robot with 26 DOF, wall-powered, stands and waves; progress, photos and...

You are re-writing the firmware on the EZ-B? Wow! Any reason why? Are your re-writes of the firmware still compatible with ARC?
New features
MACADDRESS configuration once you push a new firmware, the mac address is wiped, to avoid going to the code and change the macaddress, compile & upload, is possible to assign a new macaddress.
network HOSTNAME the hostname will allow identifying the EZB in a network by name, or when looking the router networking devices.
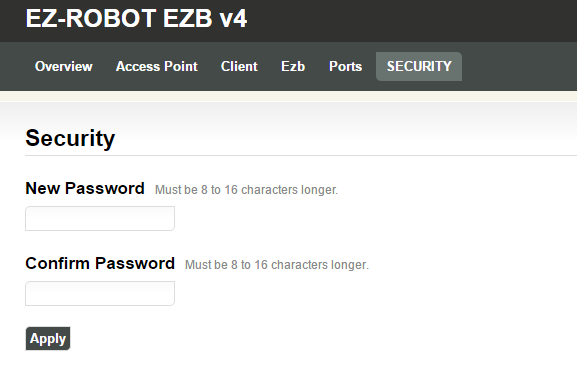
Change EZB & Camera TCP Ports
Disable the Welcome Message, useful when working or playing after hours
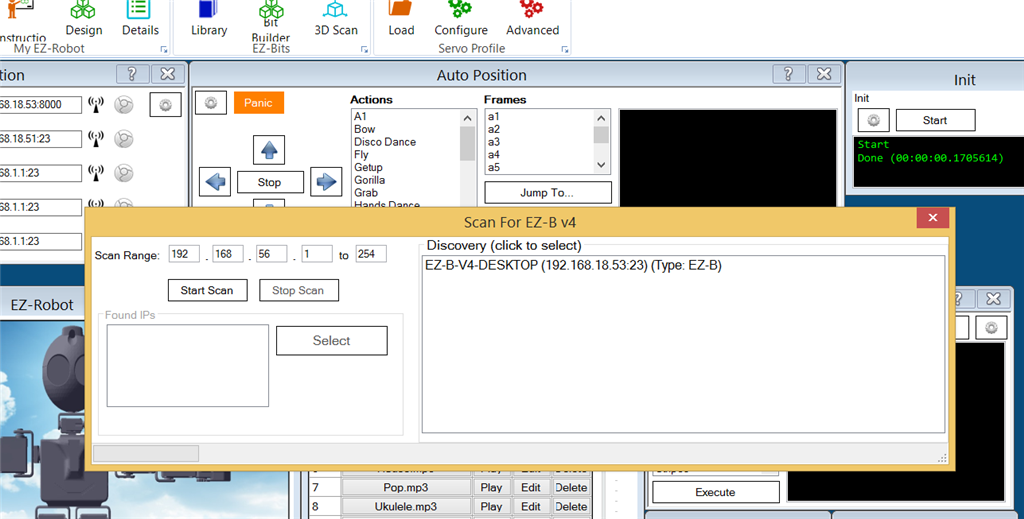
Broadcast EZB information I found a new window in ARC (Listening), then i went to check the desktop ports and i found a UDP port open, with some lucky and persistence and brute force (broadcasting multiple strings) i found the purpose, the feature allows the ARC to identify all the EZBs connected in the network a picture will help:
Client configuration:
AP configuration:
Overview page: BSSID (AP MACADDRESS) RSSI Level (good to check if the wifi signal is good)
Regarding the PORTS option:
Allows per port startup initialization, this can help:
@Justin,
Yes the idea is to keep everything "kosher", the ARC is not affected.
In case it isn't clear, this requires the programmer and instructions found here:. https://synthiam.com/Products/ARC
I am looking forward to trying it out.
Alan
Nice!
I'm confused (it's Friday), you have a new IOT board already or you have hacked the current one? I thought hacking the current board was discouraged and Canadian Mounties would come nock on your door?
This is really hacking the WiFi chip, not the EZ-B brain, and it is encouraged. See the link I provided. DJ gave instructions and an updated firmware (that btw fixes the DHCP problem from first generation boards) and makes several suggestions for possible hacks, some of which PTP included, and some he came up with himself (like adding the address broadcast function that will be part of the v4 x/2)
Alan