










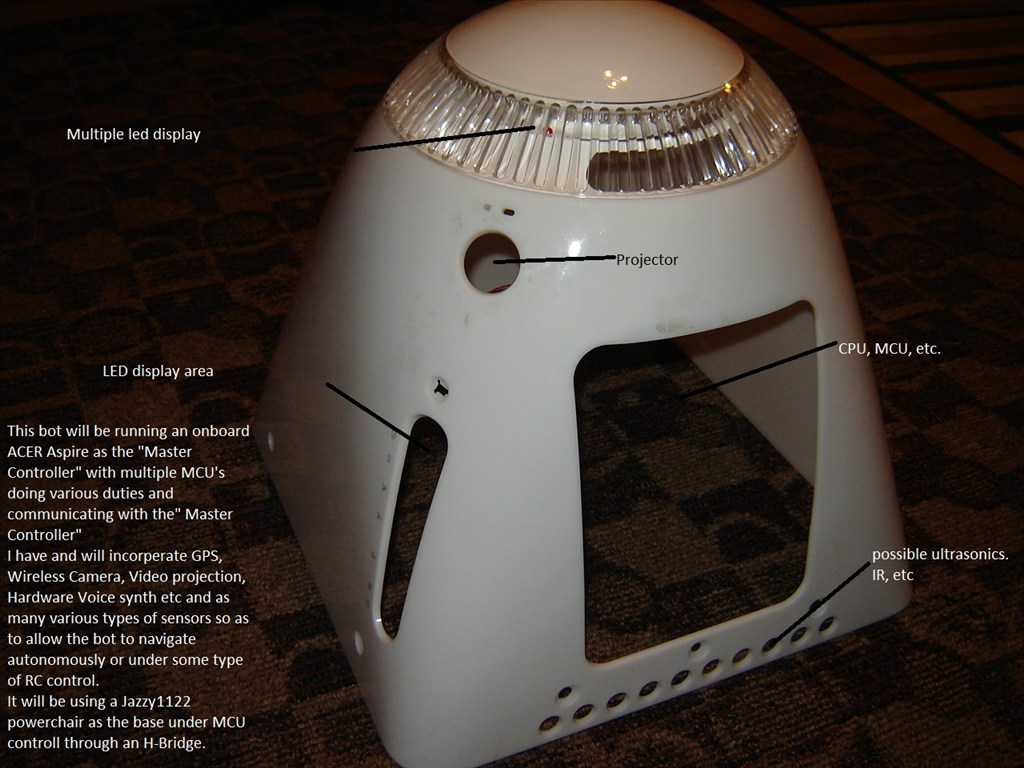
This is the start of my BIG project...the name "BIGMACK" was used because an E-MAC housing is used for the head , the name may not stay but it is here for now.
By Putt Putt
— Last update
Discover more robots

Rb550f's Meet Tk
TK robot - 31in tall, 12in base, 12lb with 12V battery; rotating torso/head, tilting dome, arms w/3 HD servos, digital...
-635396587467336392.jpg)
Robot's R3 Roomba Control Using 5 Volt Relays
Control Roomba power via EZB + 5V relays, run SCI commands and sensor diagnostics using Synthiam ARC's UART terminal and...

Joseph4760's Project X-Men Juggernaut
Merge an MGA-1 Quadtrax with a Robosapien torso: hack the circuit, remove canopy, mount torso, run on EZ controller then...

That head is very Daft Punk meets 80's video game console What are you planning for the base? I think a 6 wheeled balloon type tire setup would look great.
What are you planning for the base? I think a 6 wheeled balloon type tire setup would look great.
I'm have a power-chair ( Jazzy 1122 ) that will be the base.
That's going to be radical! I like it!
Thats so crazy looking. Do you want the head to turn?
I have the head mounted and it is pan-able right now, I was thinking of putting a single center-shaft drive of some kind but it would be too intrusive for the internal electronics in the head.
It is mounted on a hard drive motor as the bearing ( very small and tight bearing by the way ) and I will control it with a servo and linkage.
The head has a camera built in on the top, 2 mic inputs at the front, video in /video out on the back plus a cd, cd+G player.
I'd like to use the cd+g player to display a 790 type character ( 790 from the TV show LEXX ) something like the picture below, I may try and remove the cd+g player and install a computer CD/DVD player instead ( it would make thing easier for what I want ).
This character is made with CRAZY TALK PRO and will lip-sync text that is inserted into a timeline within the program. The character is also animated while sitting idle and talking.
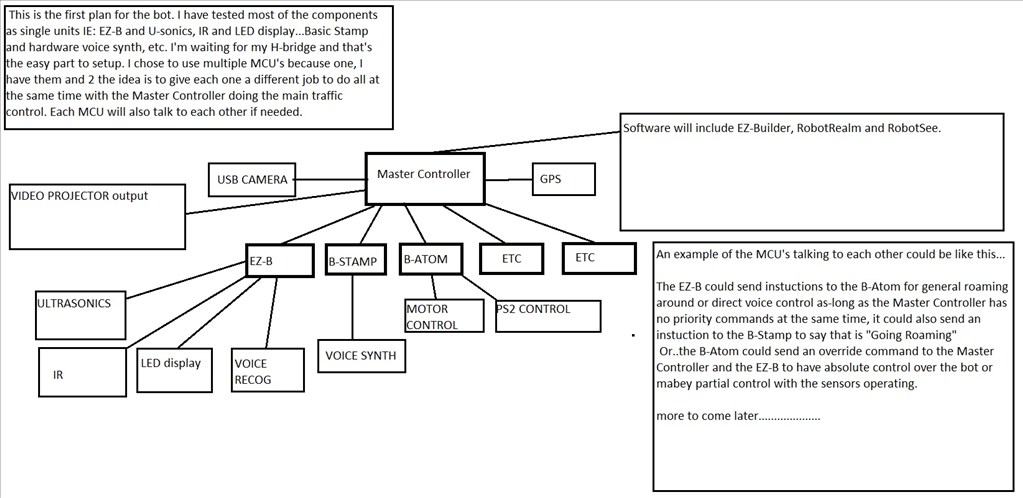
My intention is to have the bot speak its status and such. I also have a program called ULTRA HAL which I may also use.
Ok, this is just a small progress report,
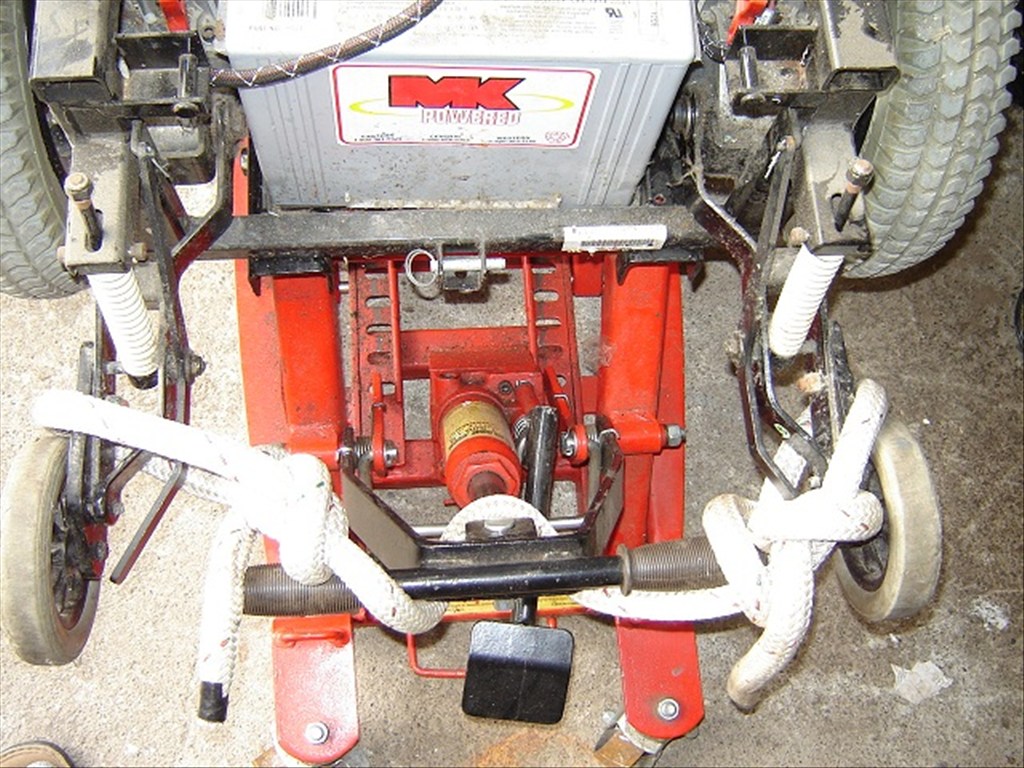
I've removed the front idler wheels to shorten up the length, these are there to push the drive wheels down when you approach a rise on the ground surface and to prevent a tip over when going down a steep grade ( they are not needed for my robotic purposes ) but after removing them I had to do some suspension adjusting.
I've also removed the electric brakes ( pretty neat actually but not needed ).
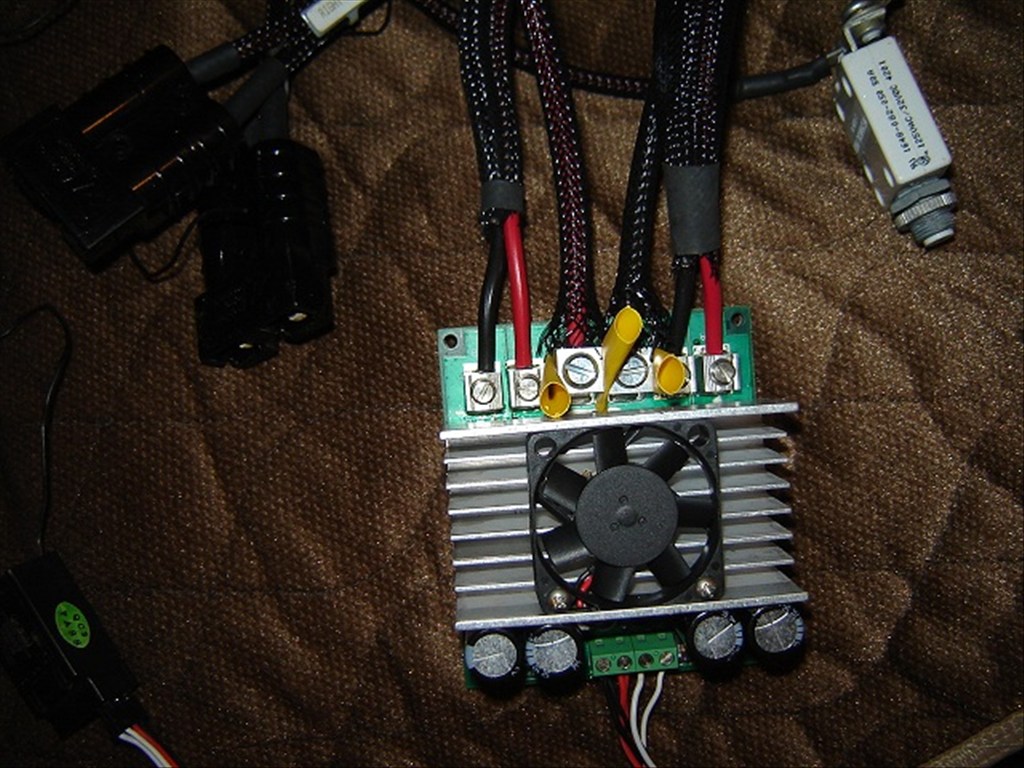
I tested the base with a SabreTooth 2x60 and it works fantastic, I blasted around my back yard full bore doing donuts, full forward to full reverse with no problems at all.
From a stand still to full power it will spin it's wheels and the cooling fan on the SabreTooth kicks in for about 5-10 secounds if that. I'm really impressed.
Here's a few pics.
The pics above are before idler wheel removal
This one is the parts pulled from the brake.

This is after the idler removal.SabreTooth 2x60
Here is BIGMACK with a few more changes,
His head is now able to pan back and forth with a single servo at the rear, I was going to bore a hole at the back for the corrugated wire sleeve but I think I'm going to leave it the way it is. The Aspire lap top is now inside with video in and out capability.
So far I only have the EZ-B connected to the lap top ( Brain )
I'm running Ultra Hal 6 ( AI assistant program ) with ARC in the background, I also use Ultra VNC which is a very easy client/server program to access BIGMACK from any where that I want, I can program EZ-B, chat with BIGMACK ( Hal6 ) and also see what BIGMACK sees on his head cam. The Head cam is also accessible by EZ-B for face recon etc.
And also the Karaoke machine is unaltered and fully functional if someone wants to sing along with BIGMACK!
:)
Next I'll be merging the body to the base WAHOO.....
He is looking wicked cool! I love this bot.