


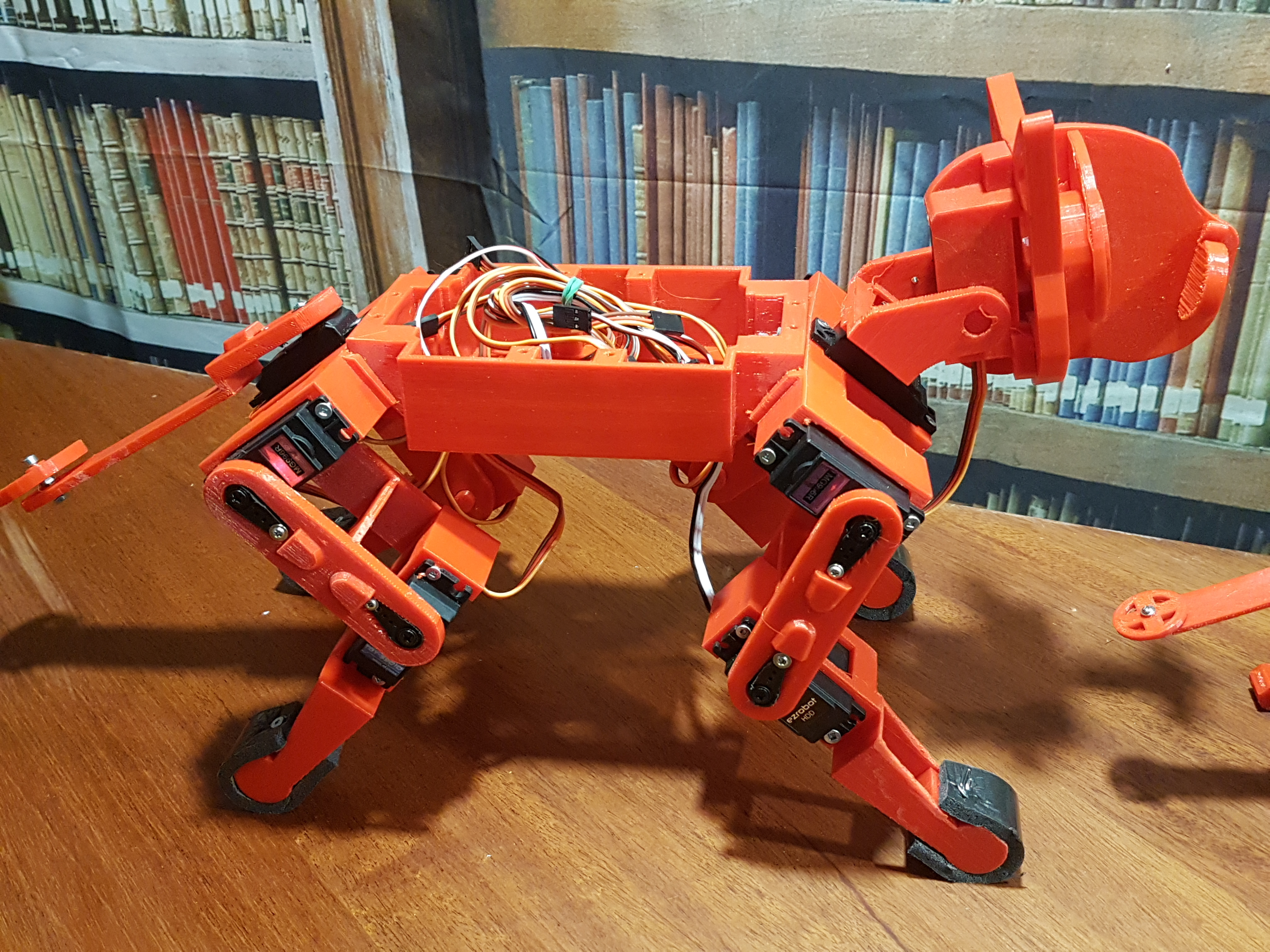
Hi After I posted the pictures of my Robot NallyCat a 3d printed version of opencat. I am still waiting for the Controller Card to arrive from China. I was in need of a project, My Android head Buddy is waiting for parts but it is finished except for programming, I will show Buddy to you in a couple of days and I had mentioned that I was thinking of making A Large open cat version using full sized servos. so I could install a camera, sensors, etc. Sooo, here is a couple of pictures of Big NallyCat which took a little longer to print then open cat. I had a Spool of Red and that is why the Cats are red. the Filament I use and the only type of filament I use is PET-g because PET-g is so strong there is very little infill 15% and I don't use much support if at all, these are tests prints of a concept, I have never had PET-g filament warp or come loose from the print bed and the parts are easily removed when the bed is cold. Have a look and if you have questions, I am always here lurking . I see a lot of Inmoov owners like myself were interested in open cat, but they wanted a large one, I know we like Larger Robots.

Discover more robots

Steve's Robot Captain Ann Droid
Cardboardhacker's Rover Ad


thats a real cool robocat.
Hey Nalley. Just a thought here. I had the rotated picture problem for a while. I was using an iphone which accommodates for that with Windows that does not. So I would have to open my iphone pics and convert them to gifs that do not rotate. It is a hassle and there may be better ways but it works for me.I usually just open the pic in Windows photo-editor and re save it.
@Nallycat The larger one looks great and looks good print quality, something I’m very interested in doing.
What was the increase in size ratio from the original "sti" print files? I’m assuming the larger one uses the standard size servos?
@Perry_S I use a Samsung Android Phone to take the Pictures, The pictures don't Rotate when viewed on the phone and they are ok when I copy them to windows. only when I import them into Synthiam is there an issue. Synthiam needs to have a turn or rotate setting after Download and also a move setting so you can reposition the pictures with the text. and a way to Size the Images, so you can create a better display.
@cem I am very experienced with 3d Printing I started with a large CNC machine which I made from scratch and started printing with 3d printers when 3d printers first appeared, and after printing two Inmoov robots my skills have developed. what I am lacking is in the design stages, I envy members like Perry, S, and like Bob Houston,Will fxtst and there are others who can design using CAD type programs. I am limited to Copy objects and make basic changes. Open Cat is like that you just can't take the parts and enlarge them the scale between a mini and full servo is a lot different. I had to make compromises that have to be made to make parts fit. if you want I will make a part list showing each part and how to convert them. The print quality is Good CEM but they were made with the least amount of detail and at the fastest speeds the printer could handle, as these robots are a concept I had to make extra prints, trial and error.
@Nallycat
Thanks for the info, it would be great if you can make a part list showing each part and how to convert them, if its not to much hassle.
Regarding the difference in size from the original one, roughly how much bigger is it, ( two the size?? ) Roughly whats the dimensions of the large one?
Cheers Chris.
Chris I am still working on the conversion list for you. but the open cat is 11.5 inches long tip of tail to nose 29.21 cm and the height is approximate as the legs bend and is measured in the relaxed standing position is 6 inches floor to ear tips 15.24 cm. The large open cat is 18 inches long tip to nose 45.72 cm and the height is aprox 9 inches floor to ear tips 17.86 cm. Bruce
Never mind. disregard