

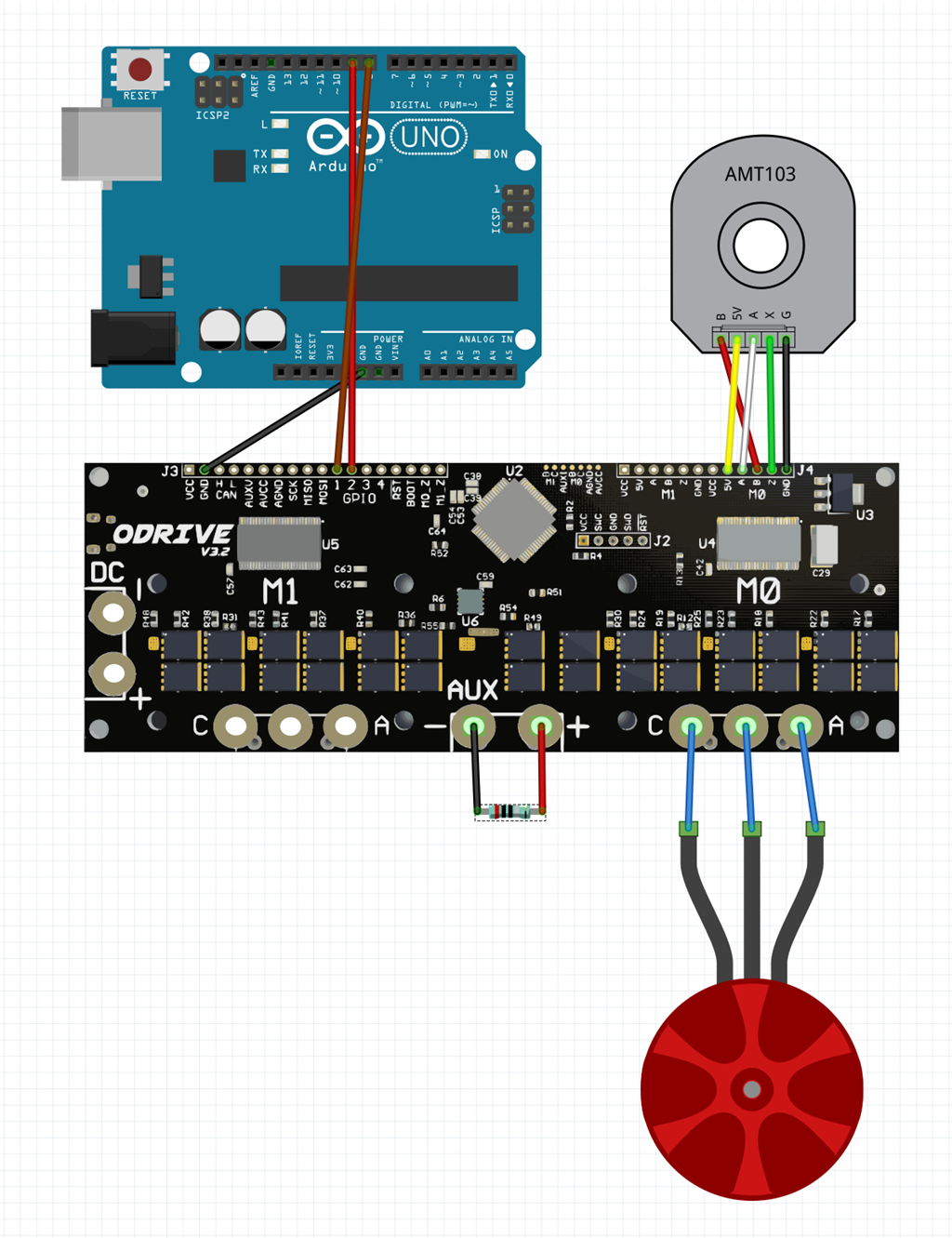
This is the setup for my Tarot 6S 4108 KV:380 BLDC motor to be used like any other servo in ARC...
It is just MY PERSONAL setup and meant to get you started, please READ THE manual over at the official Odrive website! https://docs.odriverobotics.com/
First you will need to install and configure your Odrive Software... I am running Linux, please check the installation guide for Windows found at the official Odrive website if you are running Windows! This will just be needed for the first time setup. After the setup you will use an Arduino connected to a Windows PC running ARC!
https://github.com/SwannSchilling/ODrive-for-ARC/blob/main/setup
You should see your BLDC motor moving, after being put to closed loop and receiving the odrv0.axis0.controller.pos_setpoint command...
Next you will have to upload this code to your Arduino Uno https://github.com/SwannSchilling/ODrive-for-ARC/blob/main/ODriveArcArduinoTest.ino
In ARC just add a servo control to your project, and connect to the Arduino! https://synthiam.com/Community/Tutorials/Connecting-Arduino-to-ARC-17526 The Arduino sketch will receive those servo positions and send them to the ODrive...
All non-power I/O is 3.3V output and 5V tolerant on input, on ODrive v3.3 and newer.
This tutorial is just meant to be a starting point, please mess around with my settings and share your experience, so we will get a better understanding on how this whole setup can be utilized!!
Discover more robots

Thecrustychicken's Crustybot 1.2

Jstarne1's Hulkbuster Ironman Suite , Lighting, Sound...


@Perry_S this is a clip of the gearbox being controlled with ARC! I will make a torque, speed and precision test soon...
@DJSures thanks a lot for looking at my code, I might have just typed those numbers wrong, this was more or less just a proof of concept and meant to be developed further...at that time nobody seemed to be interested so I kind of forgot about it! But since the firmware update of the Drive, the whole code would need to be updated anyways...
But since the firmware update of the Drive, the whole code would need to be updated anyways...
So I guess if there are a bunch of people being interested, we could think about doing so?
I think at the moment there are a few options for BLDC control being discussed here in the forum...
Can you adjust the velocity, set positions etc in ARC in your video example? What changed in the Firmware update?
Hey, this should be possible...all you would need to do is to adjust the Arduino code! I think @DJSures would take a look in case there are a few requests?
These are the changes https://docs.odriverobotics.com/migration
But you might want to go ahead and setup your motors once again so everything runs as smooth as possible... I revisited my settings too and started from scratch!
Oh also I found that GUI now, that a nice thing to have... Thanks for pointing it out to me, I guess they are not advertising it too much since it is still in beta!
I might have to print a test rig at some point...and just found a bunch of useful ones, I case anyone needs something that is ready to go!
https://discourse.odriverobotics.com/t/useful-cad-resources/257/14
Yah we can whip up a firmware once you're ready. And a robot skill that allows fine tuning the specs & details of the servo.
Exactly...no rush, it only makes sense once there is a real usecase scenario!