
PRO
EzAng
USA
Asked
— Edited
Auto Position More Board Connections Then Board 0?
Does the auto position control only work with the board index connection 0? with auto position
or is there a way to use it with board indexes connections 1,2,3 etc... with the auto position?
Thanks
EzAng
Related Hardware (view all EZB hardware)

EZ-B V4
by EZ-Robot
EZ-B v4/2 robot controller: dual Cortex ARM, Wi-Fi, audio/video, 24 servo/digital ports, I2C/UART, camera and Synthiam ARC control for custom robots
Wi-Fi / USB
Servos
24
Camera
Audio
UART
3
I2C
ADC
8
Digital
24

Yes - why is your entire message in bold? Also, you didn’t tag Auto Position as linked to the question. That’s super important to help keep our content organized. Thanks
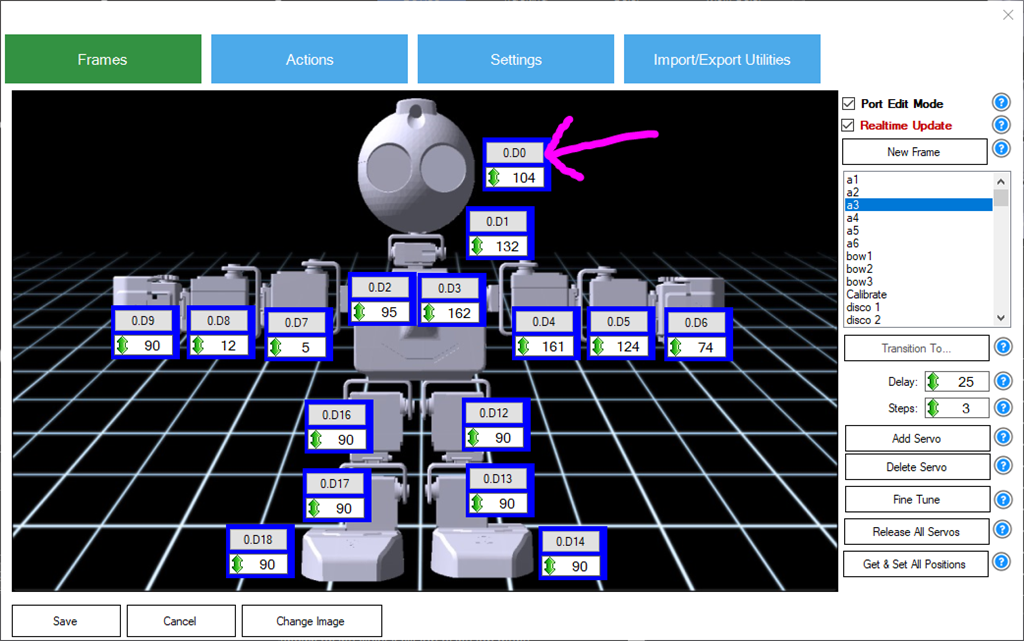
Click a servo
Then select the board index
Thanks, I should have know that,
sorry for bold stuff
thanks again
EzAng
solved again by DJ
Taking this one step farther, given that each robot would have it's own EZB and each having their own wifi logged on, is it possible to use Blockly rather than Auto Position to make multiple robots move one after another? In Blockly is there a way to designate each different board? There are pros and cons when using Auto Position but I will use it if needed.
You can do it in Blockly but AutoPosition is much easier to use. Here you go:
Ah thank you, So if you want to Move servo D4 to 60 on Board 1 then Board 2 is done like this? Command Control Connection, Connect 1 Move servo D4 to 60 Command Control Connection, Disconnect 1 (it's 60 till you change it?) Command Control Connection, Connect 2 Move servo D4 to 60
which are totally different from each other
You dont need to disconnect board 1. Use sleep to time the events, the move command does not wait till the position is reached. Hope it helps
Ok got it, Thanks!!