PRO
EzAng
USA
Asked
— Edited
Sharp IR On Car Robot, Table Top Robot Avoids Falling Off
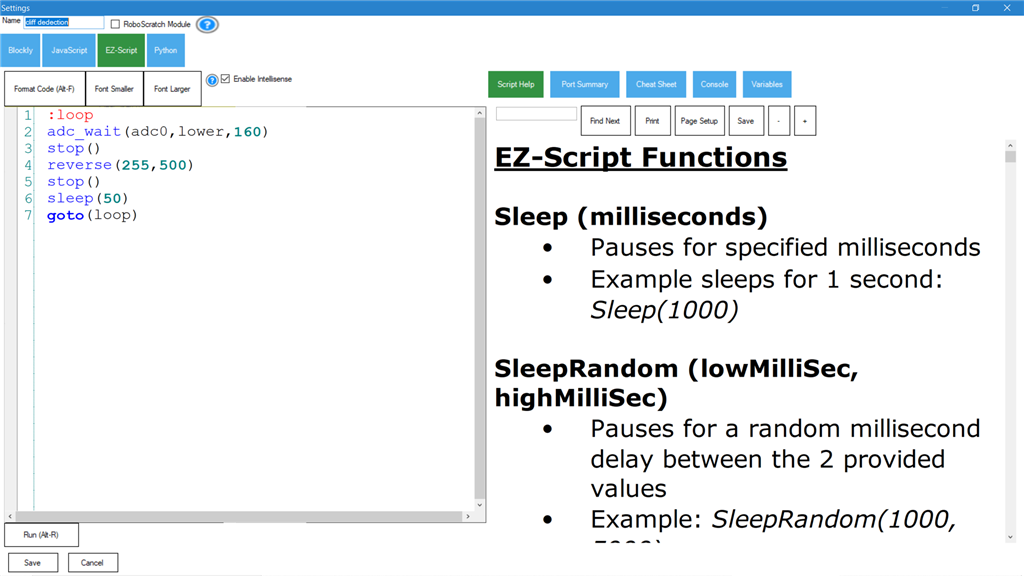
anyone know how to write this code in java?
:loop adc_wait(adc0,lower,160) stop() reverse(200,500) sleep(50) left(255,500) stop() forward() sleep(50) goto(loop)
now it starts, avoids falling off table, turns left, keeps going - cheers! All figured out below, I solved it below with help of thetechguru
thanks
Related Hardware (view all EZB hardware)

EZ-B V4
by EZ-Robot
EZ-B v4/2 robot controller: dual Cortex ARM, Wi-Fi, audio/video, 24 servo/digital ports, I2C/UART, camera and Synthiam ARC control for custom robots
Wi-Fi / USB
Servos
24
Camera
Audio
UART
3
I2C
ADC
8
Digital
24
Related Robot Skill (view all robot skills)

Indoor Positioning System
by Synthiam
Infrared indoor positioning for ARC robots: dual-camera tracks IR beacon, shows real-time heading, path and EZ-Script navigation variables
Requires ARC
v16

thetechguru,
I know this is an old thread, but I have a question.
Why do you use the H-Bridge Movement Panel in your app?
I use the servo Movement Panel for the wheels.
I am interested in table top robots that don't fall off the table :-) anymore info?
@EzAng I was using a Roli. It has an HBridge and motors, so I needed the HBridge Movement Panel to make it work, but the example will work with any movement panel. It just issues a stop, then a short back any time the IR detector discovers the distance increase. I only put one on the front, but you would probably want them at each corner with approptiate scripts for a tabletop robot so it doesn't back or turn its way off the table when responding to one of hte sensors. Maybe a script that just does a panic stop if 2 detectors trigger at once.
Alan
any sensors better then the sharp IR for table top robots that don't fall off the table?
Does this need a left or right turn to avoid the edge while it is in reverse?
I think the IR is pretty good for this use. It is sensitive and fast.
As far as the script, it depends on how the robot is being driven. This script is just a panic stop. If you want it to continue moving, then yes, you probably want it to make a turn, and then pass control back to whatever you are using to drive it. (When I wrote it, I was manually driving using the movement panel, so when it panic stopped, I took care turning and recovering...).
Alan
I tried this
works ok then stops, have to keep starting the robot
be back later for more, thanks
EzAng
Instead of the stop before the :loop, you will need to tell the script to return to what it was doing previously, whether that is a separate script or a control command, or just a forward()
Alan
Hi, I made it back,
I will try what you said, thanks
The Roomba and most vacuum robots use IR sensors for cliff detection.