
PRO
EzAng
USA
Asked
— Edited
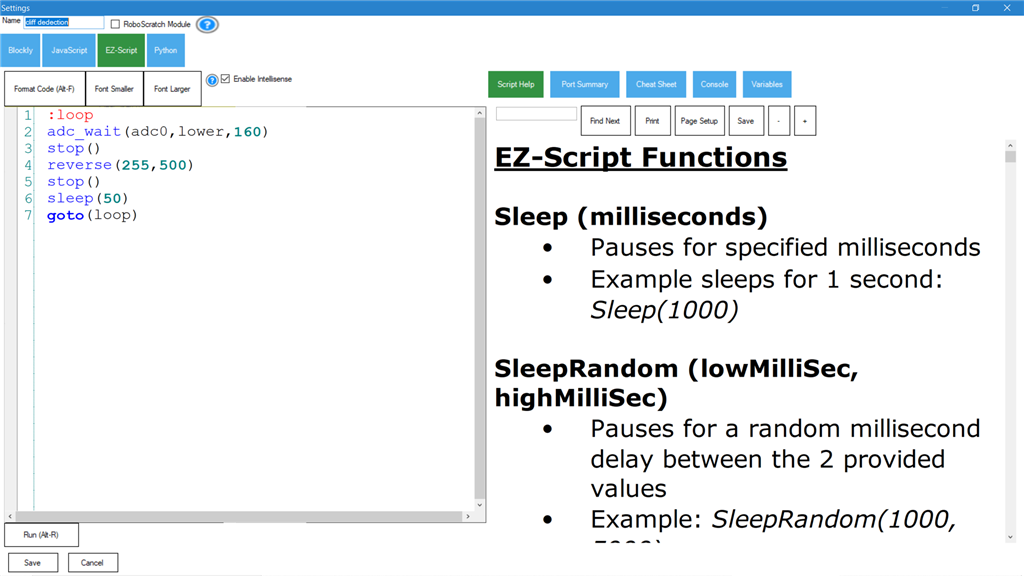
Sharp IR On Car Robot, Table Top Robot Avoids Falling Off
anyone know how to write this code in java?
:loop adc_wait(adc0,lower,160) stop() reverse(200,500) sleep(50) left(255,500) stop() forward() sleep(50) goto(loop)
now it starts, avoids falling off table, turns left, keeps going - cheers! All figured out below, I solved it below with help of thetechguru
thanks
Related Hardware (view all EZB hardware)

EZ-B V4
by EZ-Robot
EZ-B v4/2 robot controller: dual Cortex ARM, Wi-Fi, audio/video, 24 servo/digital ports, I2C/UART, camera and Synthiam ARC control for custom robots
Wi-Fi / USB
Servos
24
Camera
Audio
UART
3
I2C
ADC
8
Digital
24
Related Robot Skill (view all robot skills)

Indoor Positioning System
by Synthiam
Infrared indoor positioning for ARC robots: dual-camera tracks IR beacon, shows real-time heading, path and EZ-Script navigation variables
Requires ARC
v16

I purchased some of the IR Infrared Obstacle Avoidance Sensor Modules 7.99 for 10 units
will test soon, hope they work
I'm curious how those will work - without any rear reflector housing on the emitter or detector... will be interesting to see.
This is just to avoid obstacles