
PRO
EzAng
USA
Asked
— Edited
Sharp IR On Car Robot, Table Top Robot Avoids Falling Off
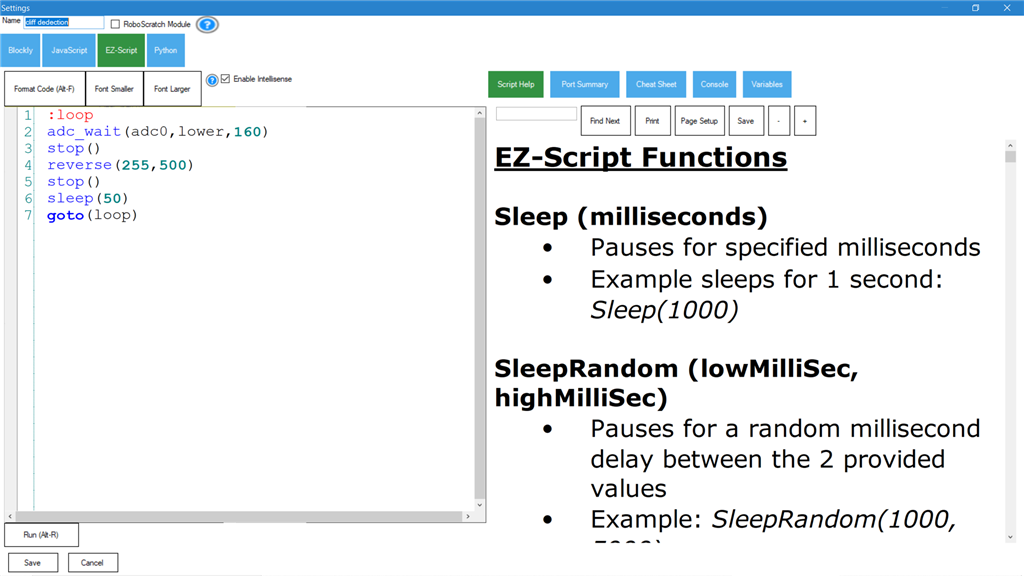
anyone know how to write this code in java?
:loop adc_wait(adc0,lower,160) stop() reverse(200,500) sleep(50) left(255,500) stop() forward() sleep(50) goto(loop)
now it starts, avoids falling off table, turns left, keeps going - cheers! All figured out below, I solved it below with help of thetechguru
thanks
Related Hardware (view all EZB hardware)

EZ-B V4
by EZ-Robot
EZ-B v4/2 robot controller: dual Cortex ARM, Wi-Fi, audio/video, 24 servo/digital ports, I2C/UART, camera and Synthiam ARC control for custom robots
Wi-Fi / USB
Servos
24
Camera
Audio
UART
3
I2C
ADC
8
Digital
24
Related Robot Skill (view all robot skills)

Indoor Positioning System
by Synthiam
Infrared indoor positioning for ARC robots: dual-camera tracks IR beacon, shows real-time heading, path and EZ-Script navigation variables
Requires ARC
v16

From what I read,
the Sharp IR Analog Distance Sensor (6.99_ detects (avoids) objects in front of the robot, I have this, works well,
I going to try The Sharp Proximity Distance Sensor (9.98) to detect more of a depth proximity
I will receive this Sunday and test and let you know,
I think the distance sensors don’t work well with close objects, specifically edge detection.
the proximity detector is designed for close contact and edge detection.
proteusy,
received the Sharp proximity sensor, did the test,
much better results, responds very different
What is the reference of those sensores? Can you post a pic? Thanks
The ones I’ve used require a two resistors and they’re tiny and super cheap. Look like this
but you can get ones that have a pcb with the wiring all ready for you. Maybe like this from Amazon
Oh yes, i know those sensors. Thanks.
proteusy
This is the Sharp proximity sensor, not the distance sensor
works well for me
Here are 2 pics:
In my experience, the sensor that ezang just posted isn't great for edge detection. They have difficulty with close objects and prefer a distance of 10+ cm away.