
Asked
L698 Motor Control Alternatives?
I've used the L698 motor controller with IoTiny for a few projects, but its form factor is a bit big and has a somewhat awkward design.
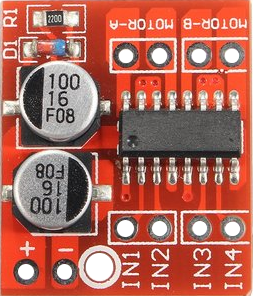
As I continue to be a beginner, are there alternatives to the hbridge that are compatible with the IoTiny? Perhaps something like an MX1508 https://www.techmonkeybusiness.com/using-the-mx1508-brushed-dc-motor-driver-with-an-arduino.html
Or some other brushed dc controller with a smaller form factor?
Thanks.
Related Hardware (view all EZB hardware)

EZ-B Iotiny
by EZ-Robot
Control IoTiny with Synthiam ARC: 100MHz Cortex‑M4 Wi‑Fi IoT/robot controller-camera, servos, ADC, I2C and digital I/O for easy internet automation
Wi-Fi / USB
Servos
8
Camera
Audio
UART
✕
I2C
ADC
✕
Digital
✕

You missed the most important detail: the motors specs, if you plan to use one or two motors.
That motor driver would work with the regular HBridge Movement panel. But it will not work with the PWM HBridge Movement panel. This means you will have no speed control. That hbridge does not support speed control. It's either on or off full speed. If you want a smaller hbridge, simply use the internal servo PCB. A servo pcb is ah hbridge.
@DJ, looking to the existent information the IN1 is forward PWM, IN2 is backward PWM. You have speed control, but is not compatible with ARC HBridge control.
Thanks for your input fellas.
I do prefer using 360degree servos as motors as they easily work with the movement panel.
However, I was looking at SMARS open robot project (https://www.smarsfan.com/) that uses an Arduino, two 3-6v small motors, motor shield and other electronics. It looked like fun. So, I wanted to use an IoTiny instead, but the Hbridge was too big for the 3d-printed body that it uses. I'm still new to Fusion 360 so modifying the body to accommodate the bigger hbridge form factor isn't in the cards.
I'll stick with servos for now.
Thanks.
Yah - servos will be great. But you can also wire the servo PCB to the existing motors and use them as hbridges. Remember, the electronics in a servo is really just an hbridge.
Given the size of the iotiny, i think an lm hbridge would fit next to it. If all else fails, a bit of duct tape never hurts HAHA
HAHA
And you can still find room to mount the camera on the front. A robot without a camera isn't a robot
Hi I hope all of you are ok
I use the L298N Motor Drive Controller Board Module Dual H Bridge DC Stepper on Amazon - it was only 12.99
I like to use the TB6612 with my smaller projects and lower voltages.
Just your luck, they are on sale at the moment! https://www.sparkfun.com/products/14451
Thanks for your help!