
Asked
— Edited
Help With Jd
Help with JD,
JD is calibrated, fine tuned, latest ARC, and example.
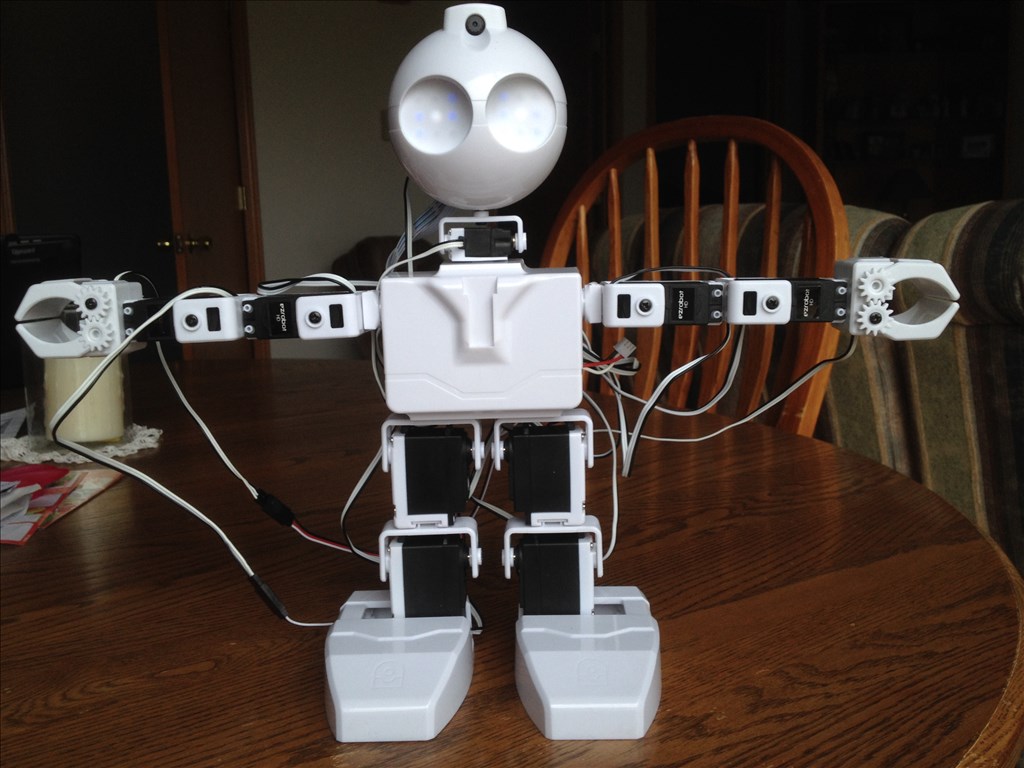
When he is connected, the int. starts calibrate frame, which looks ok. (all 90 degrees) see pic.
The shoulders servos appear to be correct (pointing up as shown in lesson).
I have read posts offset jd. When I manually lift my jd arms they only rise slightly above chest? (I think this is wrong)
Do I need to offset servos that much when they are straight (as lessons shows) up during calibrate?
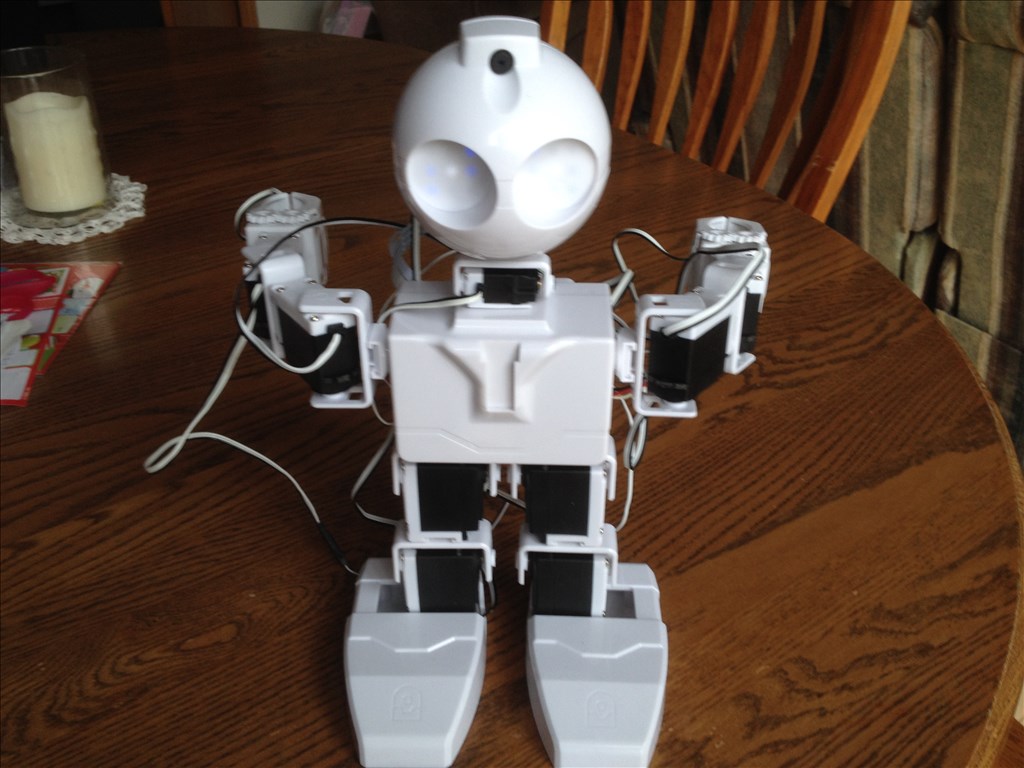
When I hit stop (stand) His arms point back? He will walk, but back balanced. See pic.
Checked wiring several times?
Has any one else received a JD recently?
Maybe I am still doing something wrong?
Thanks,
Steve s
calibrate pic

You need to calibrate the servos Steve.
JDs arms should be able to point straight down, out forwards and straight up. If they don't then the servos within the body need to be set at 90, the arms then need reattaching so that they are like in your first photo.
The arms should point down when stopped, if they don't then they are either attached wrong or the servos need calibrating.
Be sure you are calibrating the servos correctly, not just fine tuning them. Follow the lessons in the learn section, they explain it all
@Steve, I am going echo what Rich said and go one further... First follow the tutorials like the bible... Since I know servos quite well, it looks to me like some servos are in their brackets wrong.... What I would do is set all servos to 90 then any that were not cooperating (JD standing/lying at attention) I would remove from their brackets (white plastics) and with the servo still at 90 re-install them into the brackets until JD is standing (lying) at attention....
Rich, That is what I thought, but I could not understand why thy pointed up during 90 degree set. I I will remove the shoulder rotation servo arms, set servos to 90, and reconnect so they still point up. Thank you Rich Steve S
Here are a bunch of photos from the "Stop" position of a properly calibrated and made JD.
@Steve, some of your servos are in their brackets incorrectly (see my above post)...
Here is JD in the calibration position
Your JDs arms are not fitted correctly.
Steve, you were unable to follow the tutorials - this is because the tutorials show the way the arms need to be installed.
This is how the arms are shown in the tutorial pages...
In order to calibrate the servos by creating a Fine Tune profile, the servos need to be installed in the shoulders like the picture above.
Do not worry, it's a really easy fix Simply put the JD in calibrate mode and disconnect the arms at the shoulder. Then, slide them back in the correct position. Voila!
Simply put the JD in calibrate mode and disconnect the arms at the shoulder. Then, slide them back in the correct position. Voila!
Ha, ha... Forgot you can simply un-clip and re-attach ez bits at a different angles.... You still might need to adjust some of your servos by removing them and following Servo calibration tutorial , but DJ has a simpler answer for this one....