
Asked
— Edited
Help with JD,
JD is calibrated, fine tuned, latest ARC, and example.
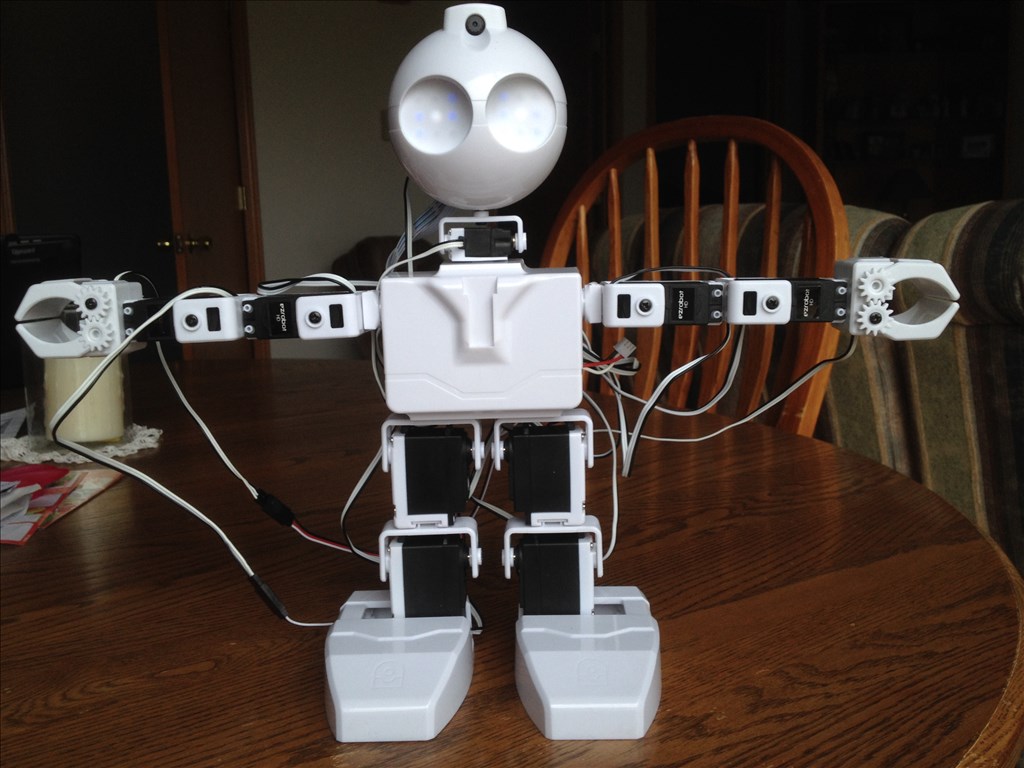
When he is connected, the int. starts calibrate frame, which looks ok. (all 90 degrees) see pic.
The shoulders servos appear to be correct (pointing up as shown in lesson).
I have read posts offset jd. When I manually lift my jd arms they only rise slightly above chest? (I think this is wrong)
Do I need to offset servos that much when they are straight (as lessons shows) up during calibrate?
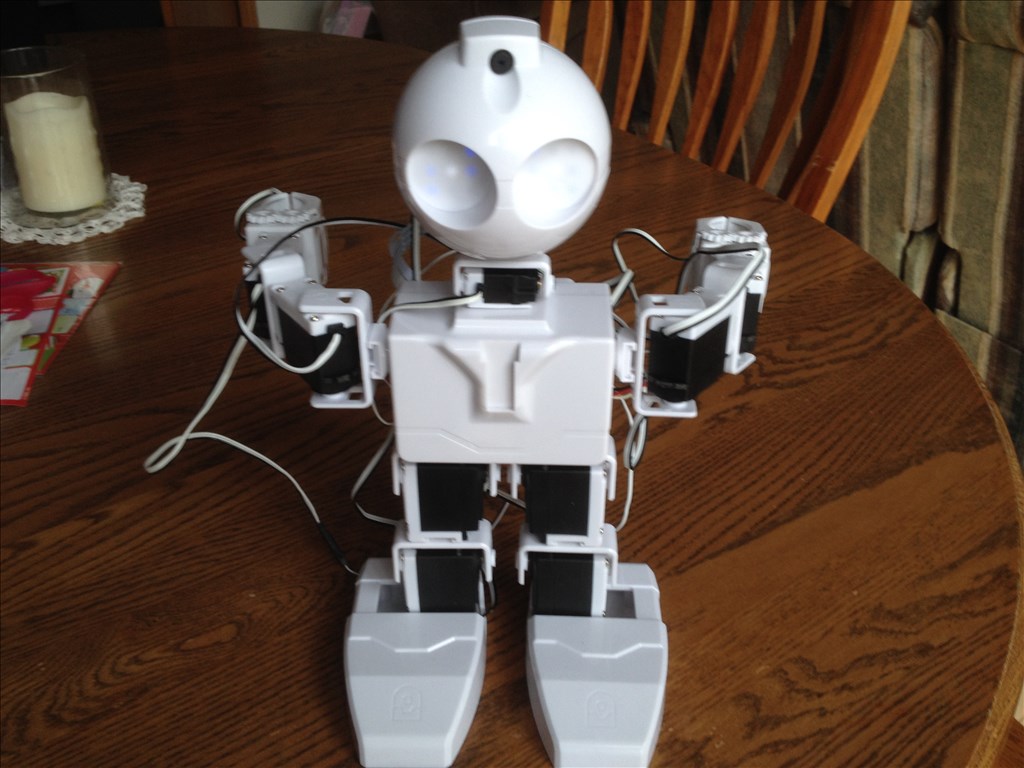
When I hit stop (stand) His arms point back? He will walk, but back balanced. See pic.
Checked wiring several times?
Has any one else received a JD recently?
Maybe I am still doing something wrong?
Thanks,
Steve s
calibrate pic

Nice!... What's the other one getting?
steve s
the walk is awesome
Richard, The 5 other grandsons are younger, but they like robotics.
Nomad, Thanks, I like looking @ all your robots.
5? Wow!... hopefully they all won't be into robotics or else you're gonna' go broke buying them ez robot stuff....
steve s
you can contact me on skype as patrick.dierckx19 or [email protected] or [email protected]
its christmas time and you never know what happens in your mailbox.
happy holydays