Asked
— Edited
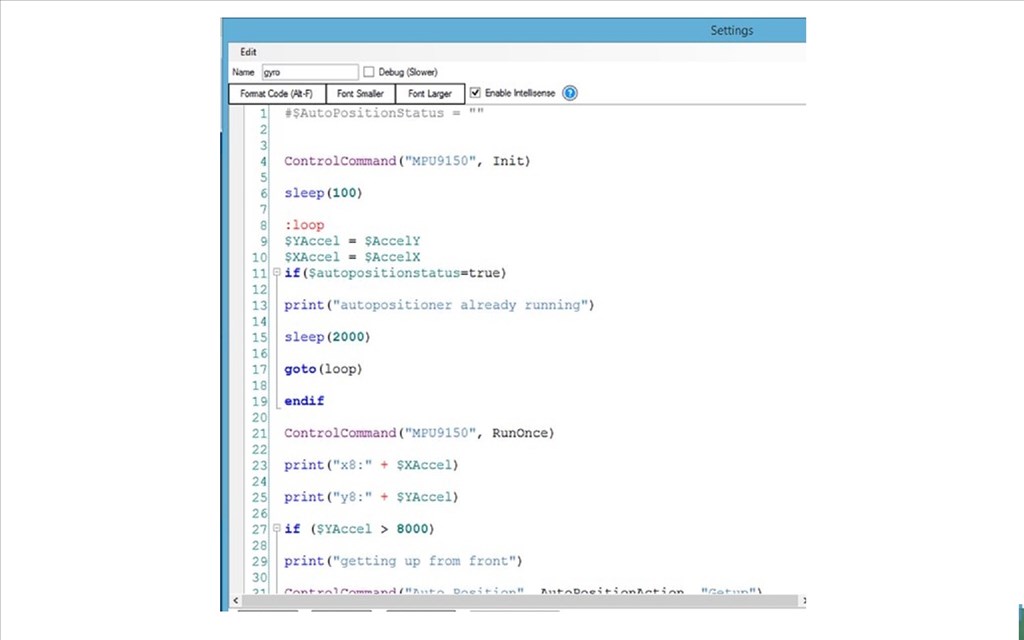
Gyro,Motion Runs Twice
the gyro works great,only jd does the motion twice?
 Hitachi-LG LDS Lidar
— Hitachi-LG LDS 360-degree LiDAR driver streaming scans into ARC NMS for obstacle detection, SLAM use, Arduino hookup, config options and variables.
Try it →
Hitachi-LG LDS Lidar
— Hitachi-LG LDS 360-degree LiDAR driver streaming scans into ARC NMS for obstacle detection, SLAM use, Arduino hookup, config options and variables.
Try it →
the gyro works great,only jd does the motion twice?

@nomad.
Show us the script you're using.
hi steve.
its says run once
Share your project by uploading the ezb file here.
i forgot how to do that.
@nomad.... look in you ez robot folder on your harddrive . Find your ezb project file... attach it to a post and upload it...
i try
jd-origineel.EZB
hope this works
@nomad.
yeah, the link for your project works fine. I had a quick look through it and can't see what is causing the issue I'm afraid. Hopefully someone else will be able to figure it out for you.