Asked
— Edited
Gyro,Motion Runs Twice
the gyro works great,only jd does the motion twice?
 Sharp IR Collision
— Stops movement panels when a Sharp IR sensor on EZB ADC detects objects within a set range; displays ADC voltage, VU meter and 0-255 distance value.
Try it →
Sharp IR Collision
— Stops movement panels when a Sharp IR sensor on EZB ADC detects objects within a set range; displays ADC voltage, VU meter and 0-255 distance value.
Try it →
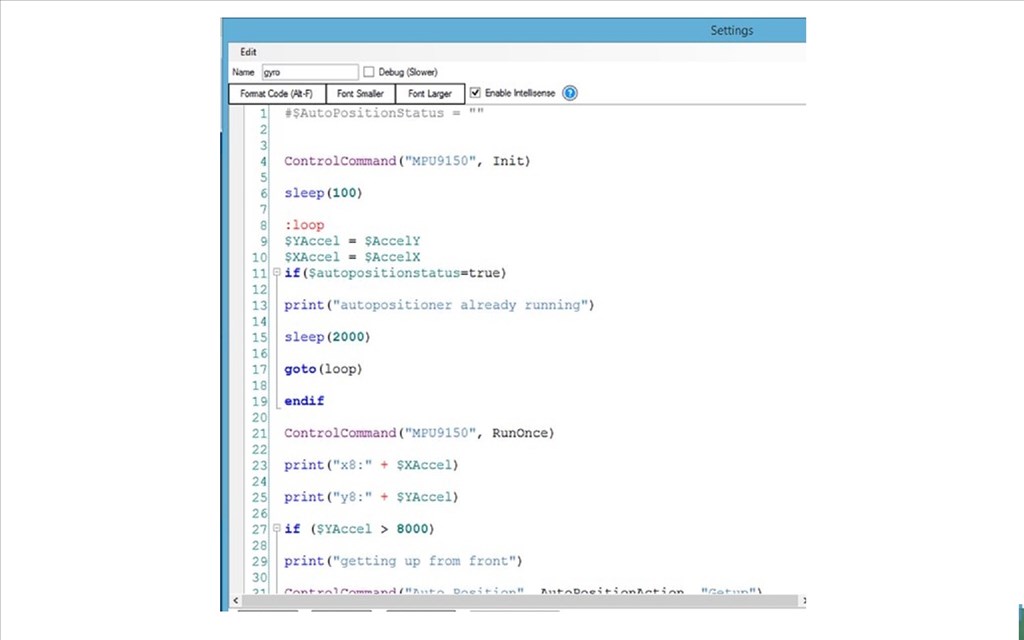
the gyro works great,only jd does the motion twice?

ControlCommand("MPU9150", Init)
sleep(100)
:loop #Added these because $AccelX and $AccelY were not recognized print("Start of loop") $XAccel = $AccelX $YAccel = $AccelY
if ($AutoPositionStatus = true)
print("AutoPositioner already running...")
sleep(2000)
goto(loop)
endif
ControlCommand("MPU9150", RunOnce) $XAccel = $AccelX $YAccel = $AccelY print ("x: " + $XAccel) print ("y: " + $YAccel)
if ($YAccel > 8000)
print("Getting up from front")
ControlCommand("Auto Position", AutoPositionAction, "Getup")
waitfor($AutoPositionStatus = false) $XAccel = $AccelX $YAccel = $AccelY
print ("x: " + $XAccel) print ("y: " + $YAccel)
ELSEif ($YAccel < -8000)
print("Getting up from rear")
ControlCommand("Auto Position", AutoPositionAction, "stand from sit")
waitfor($AutoPositionStatus = false) $XAccel = $AccelX $YAccel = $AccelY
print ("x: " + $XAccel) print ("y: " + $YAccel)
endif
sleep(500) $XAccel = $AccelX $YAccel = $AccelY
print("End of loop...Restarting") goto(loop)
thank you d.cohran
forgot to check solved
Great solve David, and I'm pleased you got everything sorted now nomad.
steve g
thats two jd's getting up now.d.cohran is good programmer.