
TheTechnomanc3r
First Post - My Robotic Arm Design Is Finally Finished - Hopefully A Complete Ro
Hello fellow robot enthusiasts! First time poster here, allow me to introduce myself, my name is Gray and I am an artist and inventor based in Los Angeles.
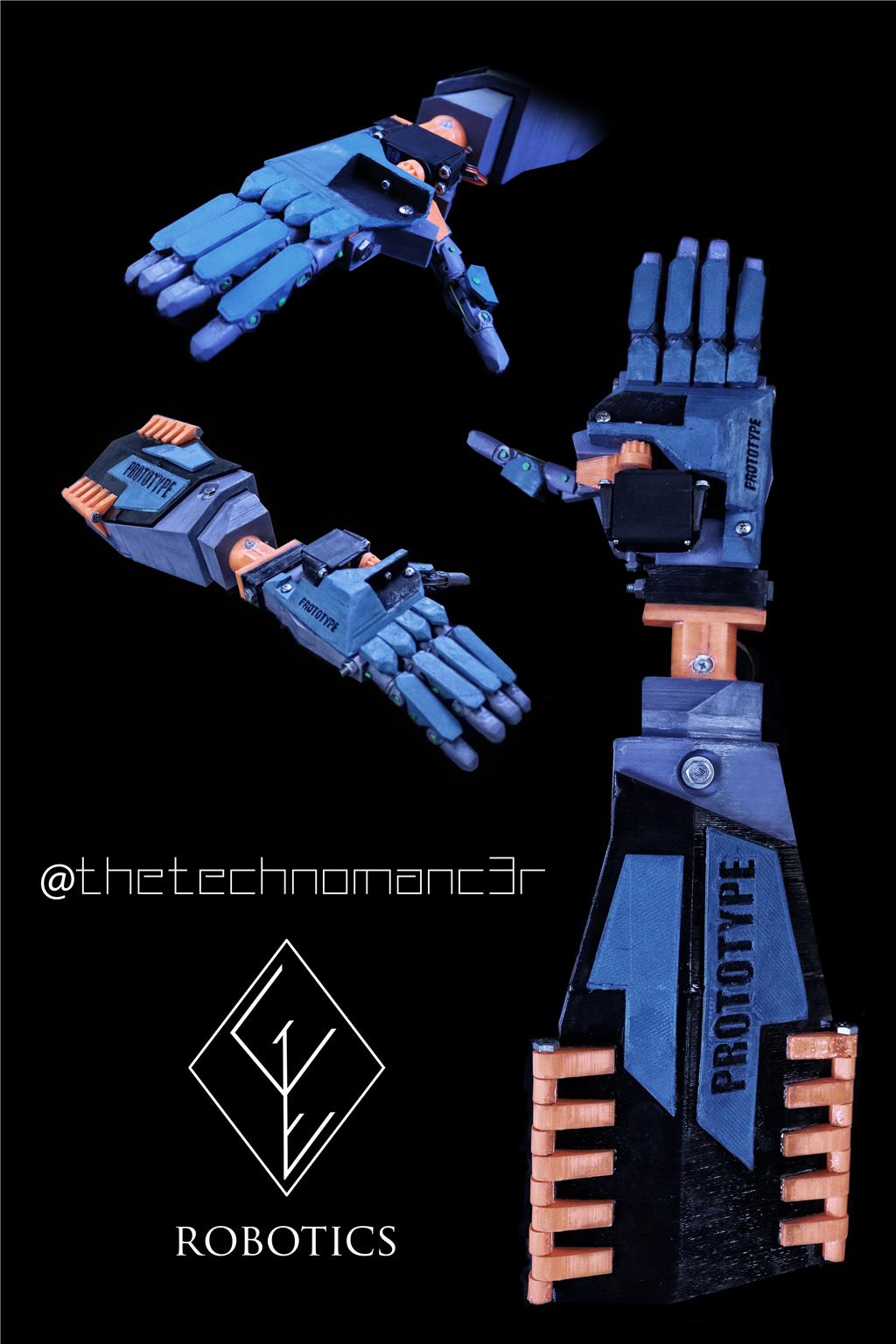
I just wanted to show off my first robotics project of my own design, made in blender and printed on a heavily modified XYZ DaVinci 1.0 3d printer in ABS and Algix ALGA filament. I am also working on a seperate InMoov build simultaneously, with pics and videos on both to come. But my robotic arm is done! I spent months designing, printing, re-designing, and reprinting this, and am very happy with the results! It is fully functional and ready for programming, I'll throw together some code and post the video soon, but in the meantime, here are some pictures! I will be updating the project in this thread for those interested, as well as my upcoming youtube channel "The Technomanc3r". My instagram username is @thetechnomanc3r as well, for more images following my projects.
The arm is powered by 7 servo motors, it has motion in the wrist, each individual finger, and the thumb has two different positions for different tasks. The arm and grip is VERY strong, because of the forearm gearbox design, will be doing a strength test very soon.

Welcome, looking forwards to seeing your youtube channel on your progress, your design looks very interesting.
Cheers Chris.
That's excellent - nice build! You can take a look at the ARC projects from bob Houston, perry_s, cem or Richard R.. They've already created the Auto Position for the ezb you'll need to control the servos for hands.
Those servos you're using will burn out pretty quick, when they do replace them with the ezrobot servos from your developer kit. They're much stronger and very quiet as well!
That hand(s) looks like an awesome design... If I might ask, any chance will you be sharing the stl files for it?
@Cem @DJ Sures Thank you both! Glad you like the design! This is the first time I've ever used blender for mechanical parts like this, so I'm still working out a few little issues. But I am really happy with it overall!
As for the servos, I think you are totally right! I just used some cheap ones for this proof of concept, I've already started Mk 2 though, which is modeled to fit the better servos.
@Richard R Thank you! Yeah I do plan on putting the STL files up for download, I have to make a few adjustments with the fingers though, they're a little bit loose and occasionally jam against eachother. I fixed this by putting a small washer in the trouble joints, but I would like to fix it in the model before I put them up to download so all your parts fit.
Also, here is a photo of my inmoov project I'm working on simultaneously (I plan on making a full robot to go with my arm here, but I may make an adapter to make it inmoov compatible as well, my main worry is it being too heavy for the inmoov frame) I have the second arm printing right now, but as soon as that's done I'll put a video on this guy as well.
Hi Gray, that arm looks fantastic! I'm also interesting in hearing about your XYZ DaVinci 1.0 modification as I own one of those as well. Welcome to the community!
@TheTechnomanc3r Dude you rock!... You have some serious skills man... Fantastic... Please keep posting updates...
@JustinRatliff - Sure! Have you done any mods to yours yet? The first thing I'd recommend doing is updating it to run Repetier rather than XYZware. There are a few tutorials online but those are outdated and will brick your printer. you neede a different version of arduino and an additional patch. I'll be posting a video tutorial as soon as I get a chance to film it, but that'll improve your print quality 10x and give you waaaayyy more features and filament options. I also converted it to a bowden extruder, I am still perfecting that mod, but will share my experience as I go! I'm also thinking about replacing the glass bed with an aluminum one if I can fabricate that, as the glass on mine started to chip (I flipped the glass over to the unchipped side and always use painters tape, but I'm not sure how long it will last because of the weakened glass)
@RichardR Thank you very much! I'll get some updates up as soon as possible! I'm so glad to get so much positive feedback on this project!
Rad effect on the inmoov print. Where will you be putting the camera? I know Richard put mine in the eye. Not sure where others have theirs
We are expirementing with a few wide angle lens upgrades as well. Which will be super useful for tracking by increasing peripheral view