
TheTechnomanc3r
Hello fellow robot enthusiasts! First time poster here, allow me to introduce myself, my name is Gray and I am an artist and inventor based in Los Angeles.
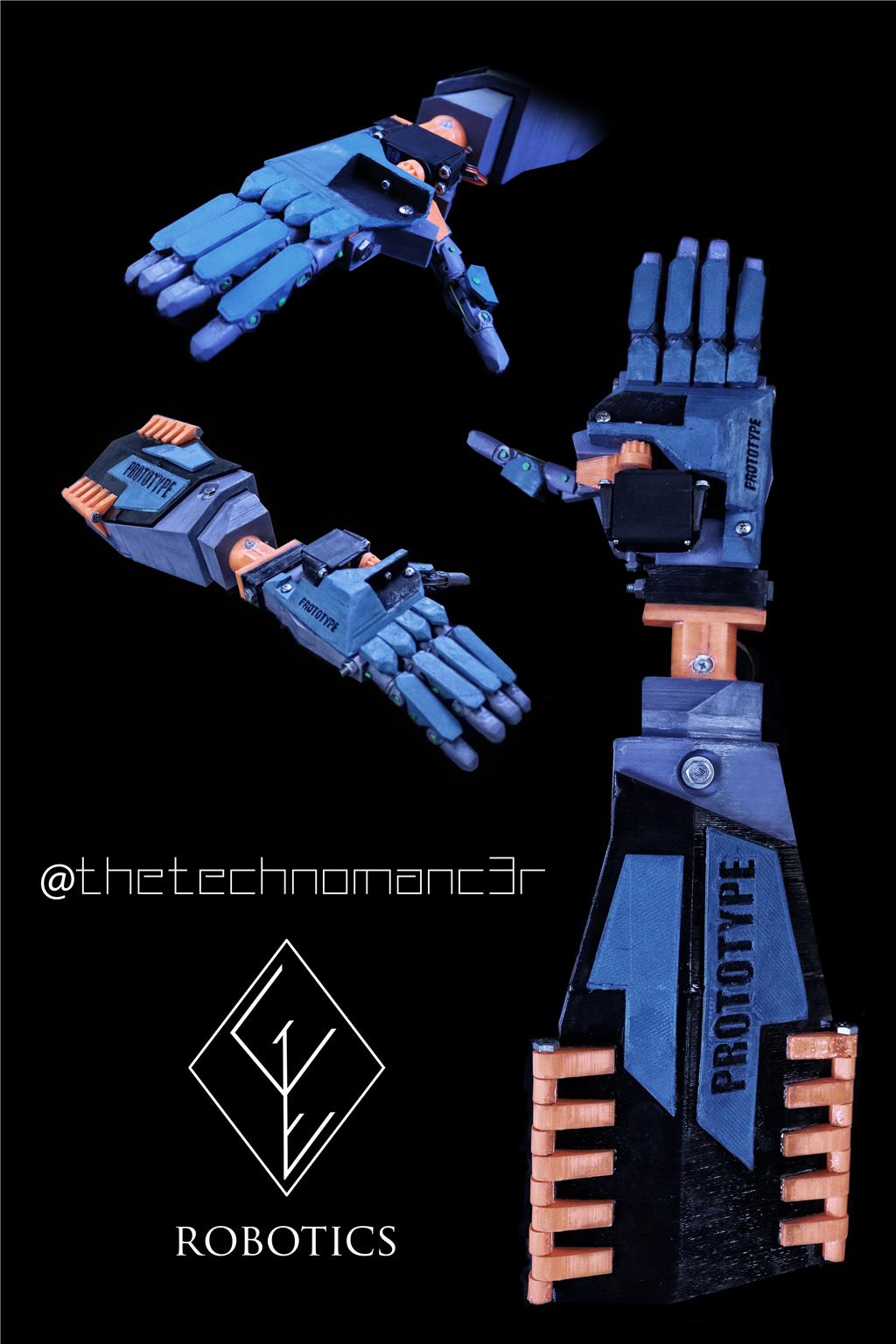
I just wanted to show off my first robotics project of my own design, made in blender and printed on a heavily modified XYZ DaVinci 1.0 3d printer in ABS and Algix ALGA filament. I am also working on a seperate InMoov build simultaneously, with pics and videos on both to come. But my robotic arm is done! I spent months designing, printing, re-designing, and reprinting this, and am very happy with the results! It is fully functional and ready for programming, I'll throw together some code and post the video soon, but in the meantime, here are some pictures! I will be updating the project in this thread for those interested, as well as my upcoming youtube channel "The Technomanc3r". My instagram username is @thetechnomanc3r as well, for more images following my projects.
The arm is powered by 7 servo motors, it has motion in the wrist, each individual finger, and the thumb has two different positions for different tasks. The arm and grip is VERY strong, because of the forearm gearbox design, will be doing a strength test very soon.

@DJ Sures - I actually took out one of the white eyes and put the camera in there since I took this photo. I forgot that that photo was a little outdated! I have also since installed the PIR sensor in the chest and upgraded to Bob Houston's ball jointed neck.
A wide angle lens would be awesome!
Welcome aboard Gray. Arm design an Inmoov progress look great. Let us know if you need anything.
Hey everyone, sorry for the lack of updates, I had some problems with a spool of ABS i bought, which led to me having to re-print some of the 3D printed components due to faulty plastic that started to disintegrate during testing! Never seen that happen before! But like any maker I saw it as an opportunity to improve my design even further, rather than be discouraged! I'm calling this one the "Mark 1.5" because I re-used a lot of parts from the original, just in a different configuration!
The first videos are filmed for my YouTube channel, @thetechnomanc3r and are awaiting editing, I got the arm hooked up to the EZB so easily, this really makes the process so much easier! I was using arduino up until now. so I'll share those here as well either tonight or tomorrow! I am entering a robotics competition to fund my project and get me a college scholarship! So that would be pretty neat!
New upgrades-
-Stronger, reinforced wrist gear, with dual servos. I found the old single servo design, could rotate the hand with no problem, but struggled when the hand was actually holding something with any weight, so I changed that! Will probably come up with something more "elegant" for mk 2, but this does the job!
-New actuator gear mechanism, allowing the fingers to hold more weight without failing or damaging the servos, my goal is to great the strongest, low cost 3D printable robot arm on the market, while using only consumer-available parts.
-folding, modular design for easy maintenance/part replacement.
That's all for now! The rest of the robot coming soon. I am on hold until I get a printer better suited for stronger and flexible materials. Along with my separate InMoov robot build!
The arm folds open for easy access!
And unfortunately... here is what happened to the last one. It just began rottign and falling apart one day as I was testing it, I kept trying to patch it with acetone, but that jut made it worse (must not have been pure ABS, some luck huh?)
Hey everyone, so I have question about the EZB 4, I have been fiddling with it for hours with both the included 6 battery holder (with both rechargeable and regular batteries) and a desktop power supply (I am using the included servos). And every time I connect it, it just reboots! Even if I only connect 1 servo, or no servos at all, it just seems to be struggling for power. I understand that this is an amp issue and not a voltage issue, but I just want to get it right if I'm going to have to buy more stuff! Working on an artist/mad scientist budget always complicates things!
I am entering this robot arm in a robotics contest and scholarship application that really means a lot to me, so I'm in a bit of a hurry and the deadline is this week. What power supplies are you all using? I'm totally okay with really any option whether that's a different battery or wall plug, as long as it works, its crunch time now! I was really counting on the servos that came with the kit to work with the board and power supply included! I'm sure I'm going to feel really dumb when I figure it out, I'm still a EZB n00b! Been using arduino up until now!
I'm sure I'm going to feel really dumb when I figure it out, I'm still a EZB n00b! Been using arduino up until now!
Surely do not use the 6 battery adapter. Chuck that thing in the garbage
As for the power supply - can you provide more details? How many volts and amps? Have you looked at the power supply tutorial? Lots of great advice there!
Here's two power tutorials for you...
https://synthiam.com/Tutorials/UserTutorials/163/1
And
https://synthiam.com/Tutorials/UserTutorials/170/1
Thanks for your reply and awesome tutorials! This has all been very helpful! Yeah I kinda figured that would be the case with that battery adapter, I was looking through the forum and google for answers when your tutorial explains it just fine, that was silly of me to have somehow skipped the power video and watched the software tutorials! Guess I got a little overexcited and overconfident on the mechanical side of things.
And its just an adjustable desktop power supply, I didn't have a suitable battery in my parts bin and I was just eager to get my arm moving! I'll attach pictures and full specs when I've cooled down from frustration a little and go back to the workshop, I think I messed something up and fried a good portion of the servos in the arm and wont be able to get replacements in time for the scholarship deadline just due to time/finances... I'm wondering if that's why the board kept rebootingng even though I thought I was giving it the right power if I was trying to use a janky servo? Could have also been because of the different types of servos maybe? Since I was using the 4 from the dev kit to drive the fingers, and just some extra cheapo ones for the wrist and thumb temporarily until I can get more of the better servos. I tried testing the suspect servo on a regular servo tester, and it wouldn't power on either until I connected one of the working servos instead.
I'm wondering if that's why the board kept rebootingng even though I thought I was giving it the right power if I was trying to use a janky servo? Could have also been because of the different types of servos maybe? Since I was using the 4 from the dev kit to drive the fingers, and just some extra cheapo ones for the wrist and thumb temporarily until I can get more of the better servos. I tried testing the suspect servo on a regular servo tester, and it wouldn't power on either until I connected one of the working servos instead.
despite not going over 7.4v (I tried to set the power supply to match the output of the LiPo battery in the tutorial, I think I must have messed something up, gonna mess with it in a little bit and see if I can fix it or am just overlooking something)
Oh well I suppose.. Didn't get into robotics thinking there would never be mistakes to be made.
Man - burning out servos is the worst. Definitely consider ez-robot servos next time for replacement, they'll outlast the others