
Dave L
Well I finally got a new Motor Controller, (unfortunately the BV4113 just didn't have the horse power, even with a cooling fan). Anyway I now have the sabertooth 2x5. I have read several others using theirs successfully so it's obviously an ID10T error! I have seen three different switch settings, but I am still having problems. Depending on which dip setting and values I use, either nothing moves (Sabertooth blue light flashes when it receives the input signal) or I can only get one side to move and have no control over the speed. (the one side runs like a bat out of hell! Not good, since this is supposed to be a Dog babysitter!)
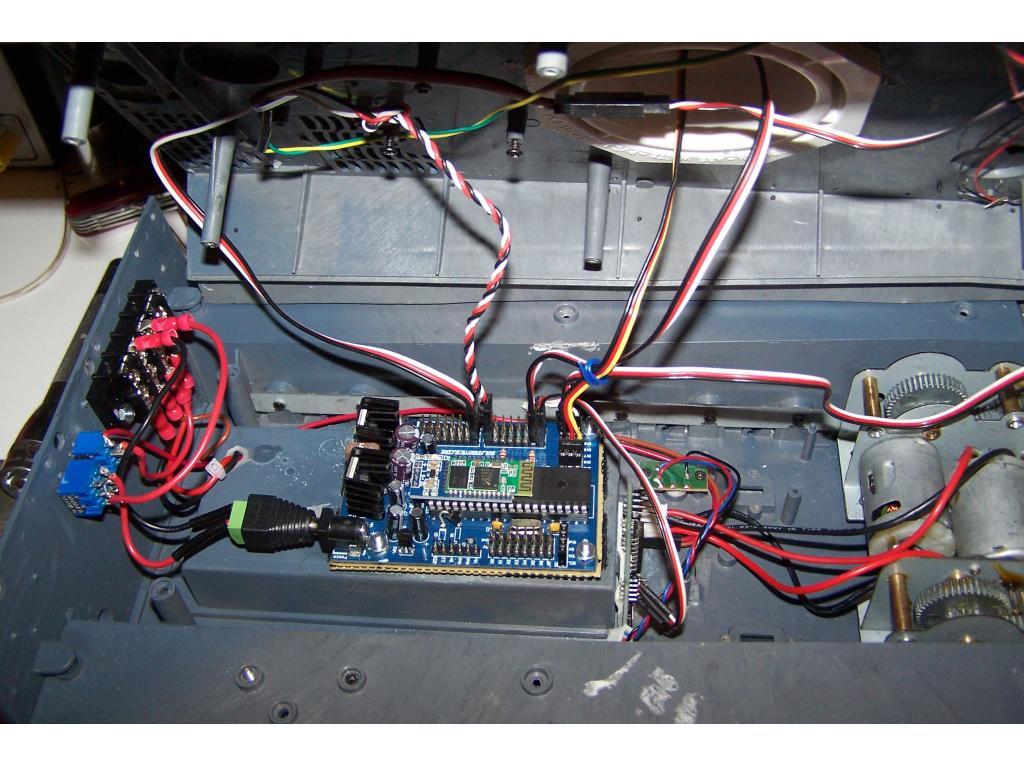
I am using a R/C tank body (tracked) using two motors (differntial drive). I have the Modified Movement Servo, Left Wheel on D1 (EZB)and S1 (Sabertooth), Right Wheel on D2. (EZB)and S2 (Sabertooth). 9.6VDC battery to B+/-, EZB has a separate 7.2Vdc battery.
Any suggestions would be greatly appriciated!
Dave L.

@Dave L - I am not familiar with the ESC. I have one of the BV413 units from DJ. After reading this I wonder if it will work for my B9 bot(next hack-B9)? I am in the process of wiring it up now. Would it overheat on you? Just not drive your tank motors around with any kind of load on them? My total bot is going to weight around 20lbs and uses track drive. Hmmmmmm
Yes to both. It would get too hot to touch even off the tracks and fail to even move if it was on the floor.
I did manage to get it (Sabertooth) to move using the joystick function. But not using the Modified servo Monvement. I also got it moving using two PWM functions, so it's obviously working from an elctrical stand point.
The servo settings of a modified servo Movement Panel need to be adjusted. The forward/reverse/stop settings.
I have a 2x25 saber tooth here. I'll try it this week and post the settings
@DJ Time to teach an old Dog a new trick!
Do you have a link or tutorial explaining how the servo motor settings affect NON-Servo motors? I get how the settings tell the servo what position(s) to move to, but what do the settings "tell" a DC motor?
Along with that, what signals are being sent to a motor using PWM. Does Duty cycle refer to the voltage level (0 -3-5 Vdc) or the on / off cycling of the voltage, is the voltage being ramped (as in saw tooth) or is it going high instantly (square wave)?
Thanks again for ALL you great help and Genius! blush
Dave L.
Under the tutorial section, there is a hardware menu tab. Under that are a list of hardware stuff, and Standard servo is one: https://synthiam.com/Tutorials/Hardware.aspx?id=4
It explains how a servo works.
This video explains how a servo pulse works (sorta): https://synthiam.com/Community/Videos/Default.aspx?id=xwZyfOnS8dk
And this video is a PWM pulse: https://synthiam.com/Community/Videos/Default.aspx?id=kY8iJ84J4GE
servos use a pwm pulse, but only a fraction of one at a lower duty cycle. Duty cycle is the percentage of time the pulse is HIGH (+5)
The length of a duty cycle is 20ms .. so 50% duty cycle is 10ms of +5 .. 25% is 5ms ... etc
Well that was very informative, thanks again!
Unfortunately, I still can't get the tracks to move using the Modified servo Movement panel. Using two PWM panels I can make the motors move FWD, Stop, and Back. What's strange is the difference between them is just one percent. 7, 8, and 9 respectively.
I have the Sabertoothe's dip switch settings 1, 4, and 5 set to off. Does that sound right?
Dave L.
@DJ Sures Have you had a chance to look at the settings on your Sabertooth. I'm starting to wonder if I got a defective board. I have tried every conceivable combination of Dip switch and Modified servo panel settings, but still can't get a consistant or proper operation out of it. Even when using just a joystick, the controller operates sideway instead of up and down?! stress
Hi Dave, I have the Sabertooth 2x25 and I use a xbox wireless controller and the EZ-B controller to move my droid around in RC mode. I have my dip switches setup like this
If your joystick response backwards, just reverse the red and black wire of each motor one at a time to get the right joystick function. Thats what I did. Also I use in the "joystick" config, joystick #1 and gave each motor a port. You may have to play around with the invert tab to get the motors running the right way here is an example:
Hope that helps