
Dave L
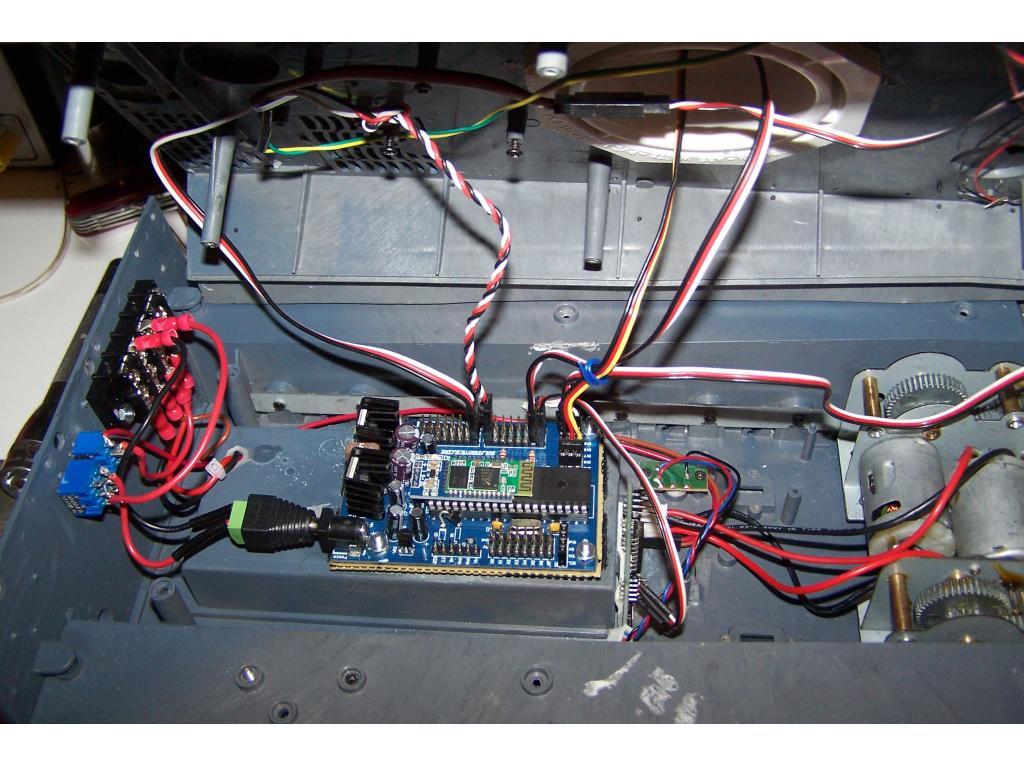
Well I finally got a new Motor Controller, (unfortunately the BV4113 just didn't have the horse power, even with a cooling fan). Anyway I now have the sabertooth 2x5. I have read several others using theirs successfully so it's obviously an ID10T error! I have seen three different switch settings, but I am still having problems. Depending on which dip setting and values I use, either nothing moves (Sabertooth blue light flashes when it receives the input signal) or I can only get one side to move and have no control over the speed. (the one side runs like a bat out of hell! Not good, since this is supposed to be a Dog babysitter!)
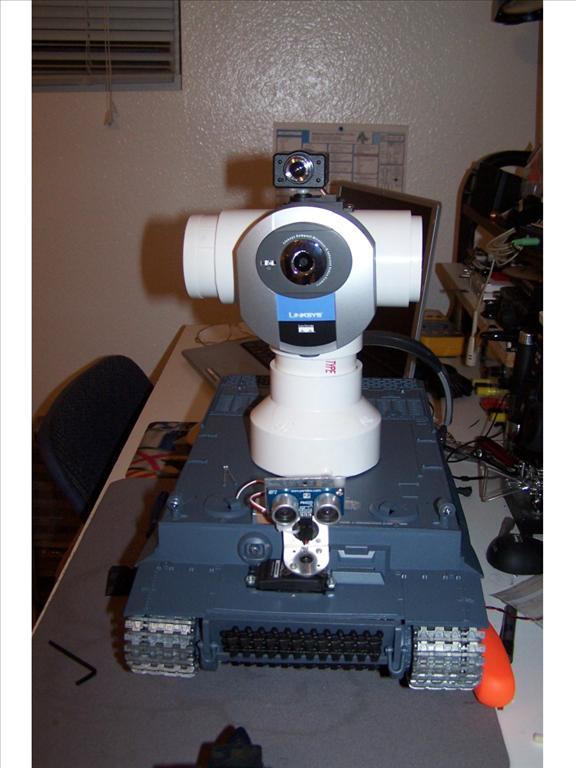
I am using a R/C tank body (tracked) using two motors (differntial drive). I have the Modified Movement Servo, Left Wheel on D1 (EZB)and S1 (Sabertooth), Right Wheel on D2. (EZB)and S2 (Sabertooth). 9.6VDC battery to B+/-, EZB has a separate 7.2Vdc battery.
Any suggestions would be greatly appriciated!
Dave L.

Hi Dave
Now you can get chasing EERM baby sitting your dog , COOL
@ DJ brilliant work .
Steve_C
Now if she"ll just stop licking the Camera! eek Next hurdle is to find a treat dispenser. Seems counter productive doesn't it?!