
robohobo
Dagu 4Ch Motor Controller(Rover 5) Assistance Needed!
hello all, im in the process of building my first ez robot and ive realized how much i truly have to learn at once. anyway when i ordered my rover 5 chassis (4 motor w/ encoders model) i opted to go with the dagu 4ch motor driver since it supported the encoders. i now realize that as a beginner wanting to jump in head first this wasnt the best idea. im fairly certain ive figured out how to correctly connect the driver to ez-b and both to my 6v sla power source, but if anyone has a diagram of how to do this properly i would feel more comfortable. my major problem is scripting a custom control panel to drive this thing. i have no clue what im doing and a push in the right direction would be greatly appreciated.
maybe DJ will add this motor controller in a future update? as i understand it ez-robot works very closely with dagu and carrys the rover 5 in store so it seems likely. ill cross my fingers.

Bump..
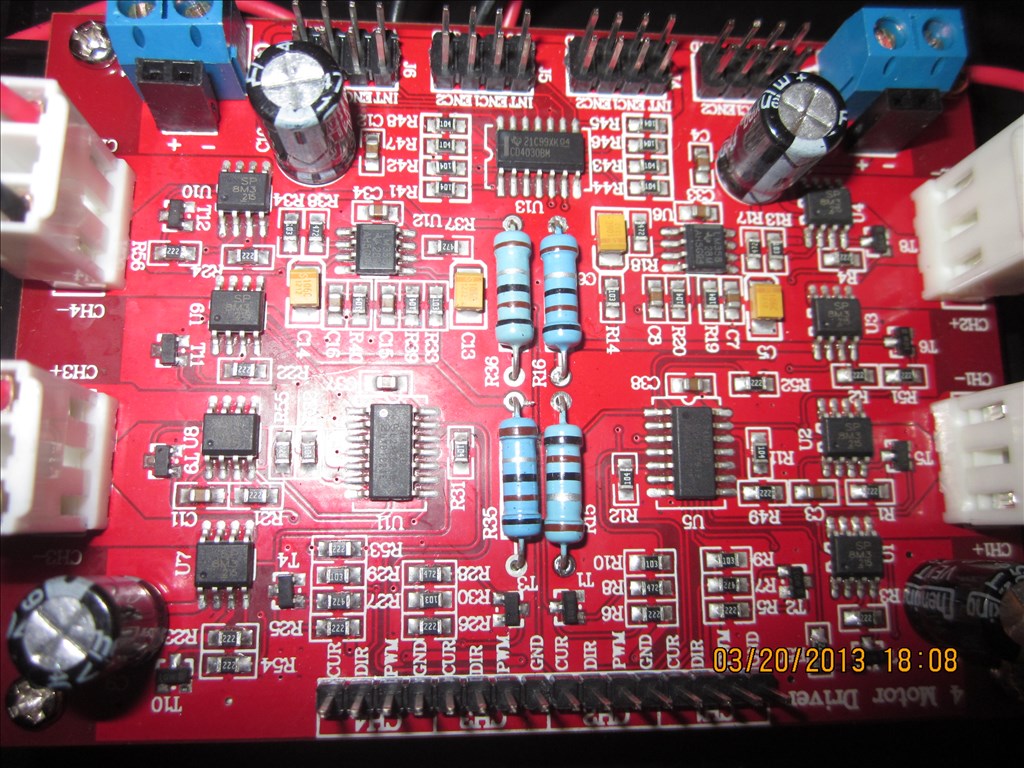
this is my obstacle. can anyone help? ive posted my problem in a few related threads and i almost got help once.
Just taking a look at the manual for it...
The Current outputs (cur) can be connected to the ADC ports of the EZB to monitor the current. 1V = 1A with a maximum of 5V so they are fine to just connect direct to the EZ-B. Use ADC controls to monitor it or a script with GetADC() to check the port and act on a high current.
Direction pin is either a high or low for direction. So I assume connect to a dgital port and a Set Digital control or a Set() script command, on for forwards and off for reverse (or vice versa, it didn't say which yet).
PWM to a digital port and use PWM sliders or PWM() command to set the speed.
I haven't a clue when it comes to the encoders.
Of course, there may be an easier way of doing it, I'm just going from what I read in the manual.
@Rich THANK YOU! ive been trying to get a little help on this for days. the translation of what the stuff in the manual means to me and the ez-b is where i was a bit lost. thanks for bridging the gap. im still not too clear on scripting the Movement Panel but i bet i can figure it out now that im about 75% less lost.
Sorry, I haven't seen that controller before. If I have time this week I may be able to review the manual for you. Encoders are quite useless in the real world. They sound fabulous in theory, but the they're not used anymore in robotics. To truly understand where your robot is, stay tuned for a future ARC update.
I have been working on something truly awesome!
@DJ Sures are you ever not working on something truly awesome? I had already abandoned the encoders because I'm simply not experienced enough, so this is great news. You and @Rich have made my day and resparked my building bug. Project post soon! Thanks Again!
Once you have it all set up and checked that what I believe is right actually is right I'll give you a nudge in the right direction with the scripting of the movement control.
But, to put it basically you just need to consider how it will move.
Forwards - SetDigital to either high or low (on or off) depending on which does which for all 4 motors. PWM to 100 for full speed. Reverse - As above but SetDigital the other way. Left - Left hand wheels to go in reverse at full speed, right hand wheels forwards at full speed. Right - Left hand wheels forwards at full speed, right hand wheels in reverse at full speed.
You could turn left and right with a forwards ARC by just slowing the left or right wheels down. If the wheels on the left are slower than the ones on the right (and slower includes running the other way) the robot will turn in the direction of the slower wheels.