robohobo
Dagu 4Ch Motor Controller(Rover 5) Assistance Needed!
hello all, im in the process of building my first ez robot and ive realized how much i truly have to learn at once. anyway when i ordered my rover 5 chassis (4 motor w/ encoders model) i opted to go with the dagu 4ch motor driver since it supported the encoders. i now realize that as a beginner wanting to jump in head first this wasnt the best idea. im fairly certain ive figured out how to correctly connect the driver to ez-b and both to my 6v sla power source, but if anyone has a diagram of how to do this properly i would feel more comfortable. my major problem is scripting a custom control panel to drive this thing. i have no clue what im doing and a push in the right direction would be greatly appreciated.
maybe DJ will add this motor controller in a future update? as i understand it ez-robot works very closely with dagu and carrys the rover 5 in store so it seems likely. ill cross my fingers.

It sounds like direction is controlled a different way, I'll have to revisit the manual and look in to it.
Once direction control is known the custom Movement Panel can be altered for all wheels to move in the same direction. Depending on mounting positions of the motors will have an effect on which need to be moving forwards and which reverse, I just assumed all were the same way around.
When I get chance I'll have another look at the manual.
I'll throw this up for anyone else to have a look over too while I try to find time to look again. The manual can be downloaded here
And an extract;
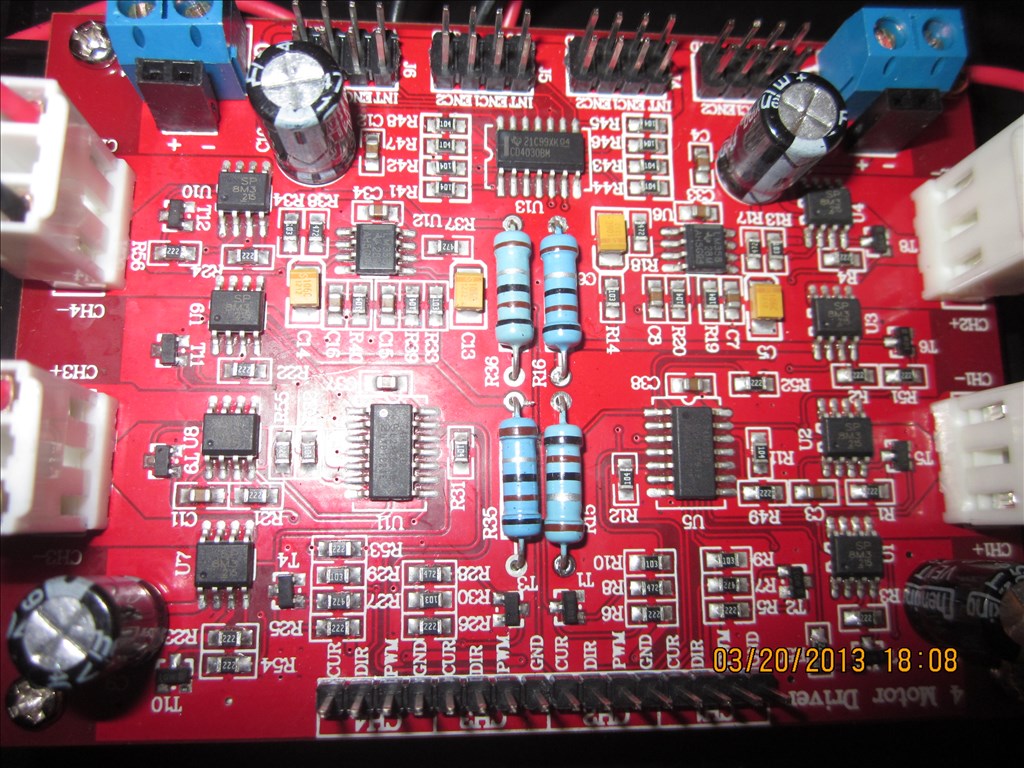
To me that says PWM to the PWM pins for speed control and off, and high/low (digital on/off) for direction control.
Ignore current for now (however I'm 99.9% sure a signal from an ADC connects to read the Current value from 0 to 5). And ignore the encoders.
I can't see that it's anything but what I've assumed and set up in the project file unless Set Digital doesn't work how I expect it to.
One other test could be to PWM 0 and PWM 100 to the direction pin to see if direction changes. However I was under the impression Digital on is the same as PWM100 and Digital off is the same as PWM0.
I've added a script to the project file called "Try Me". It uses PWM on all pins. It should, if it needs PWM rather than Set Digital, spin forwards for 5 seconds, stop for 5 seconds, spin in reverse for 5 seconds then a little bonus. Let me know how it works out. I refuse to be beaten
In the power connections I read that the motor power connections must not be connected without fort connecting the +5v to logic, I have the +5v coming from ez-b which I'm plugging in last. Could this be my issue? Do I need a switch or something for motor power supply?
That shouldn't matter as far as I can tell but it could be worth disconnecting the motor power supply. Then power up the EZB - as when you first power on the board the +5v (VCC) from the EZ-B will be +5v but all signal wires will be low, or ground. So when you power the whole lot on the +5V is the first to be receiving power anyway. Then connect the battery power supply. It seems like a lot of work and I don't really see why it would make a difference but at this stage everything is worth trying.
Have you tried the updated project file yet and run the "Try Me" script? You'll have to download it again from the cloud (or via ARC open from cloud) for the updated script (and bonus extras since I was bored at work). I've written it so it uses PWM for everything to see if that works.
Rich, your awesome. I'll try everything tonight when I get home.
If you try the project first before messing with the power side of things, if it works then no need to muck about (if you did it the other way around, i.e. disconnect power first then run the project we wouldn't be sure what fixed it - if it works).
I'll be sure to check the forums in the morning when I get up (or afternoon, it's been a while since I had the chance for a lie in), time difference means it's 1:20am here! I wont let this one beat me the manual and sales pitch says it's simple, I'd hate to see complicated!
the manual and sales pitch says it's simple, I'd hate to see complicated!
I can't remember if I changed the movement panel, but the script will run through forward, reverse etc. once we figure out what needs to be done then we can tackle the movement panel .
.
I tried it all. I first left the power situation alone and tried the new project (still just goes in a single direction with the only way to stop motors being pwm sliders) I then tried powering up the EZ-B first (which provides the +5v to the motor controller), and then connecting the power for the motors. still the same issues I even tried powering up and connecting ez-b before connecting motor power. no change.
theres even a flux capacitor and it still doesnt work
its like we have plutonium, a nulear reactor, a flux capacitor, and a delorian, and we cant figure out how to steer it.
i rl=https://www.mcs.uvawise.edu/wiki/index.php/Rover_5_(Battered_Spirit)]i
I found this, it's arduino but it had the code and wiring and I thought it might help somehow