Asked
— Edited
Ad Movement To Forwart()
i cant seems to ad a movement to script movement panel?
Forward( 255,5000 ) sleep(1000) ControlCommand("Auto Position", AutoPositionAction, "Armwalk")
anyone thank you

Are you sure you still have a sperate "movement panel"
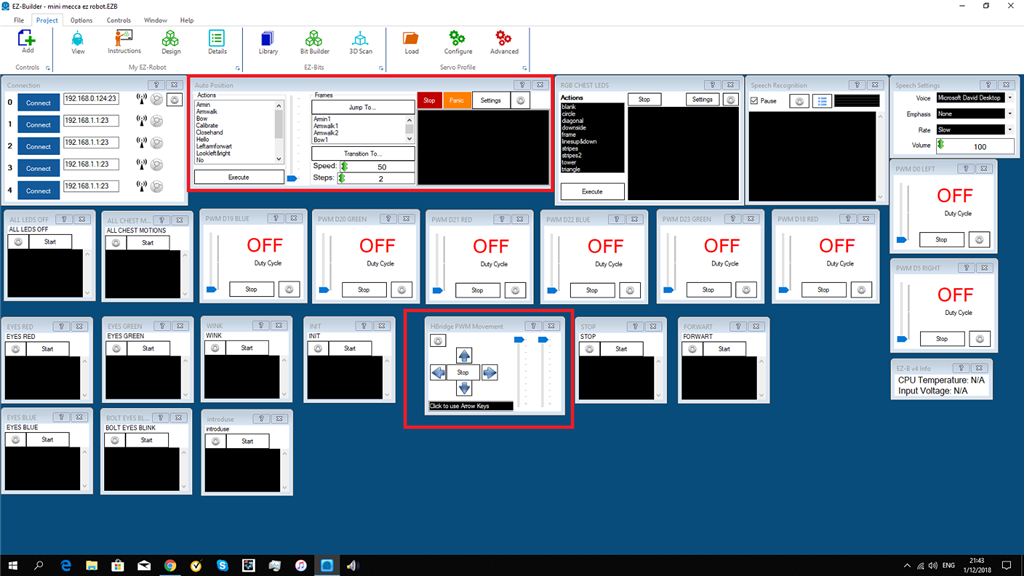
You can have a "Movement Panel" and then "Auto Position" panels OR you can have an "Auto Position Movement Panel" which does both together - which I think is what most folks use and what most examples show.
If you are using the "Auto Position Movement Panel" then you need to use:
Let us know what you are using and which robot. And remember you can check the "Cheat Sheet" under the EZ-Script control to see what commands are available to you.
hi justin
i am using a seperate movement.
i am using the mini meccanoid version.i dont have commands in the cheat sheet. only in the speech recog are controls .forwart/backwart/left&right.
I think what you want is an action to run when the robot is moving forward?
I gotcha now. Is the problem the action or the going forward? If it is going forward I'd do this:
What if you change your script to this to make this work for now so you are doing one thing at a time (get the forward actions working, then add the other action):
If you run that you should see the forward green arrow on the Movement Panel light up and robot move forward. If it does not, my guess would be the value "255" is maybe too high for the way your robot is configured. If that is case try dropping the value down until it moves forward. LIke try "250, then 245, 240...you get the idea.
dj
yes .i made two motion.i wanted to ad when the robot go's forwart and stop.
justin
i have that ,and it works.but not the motions i made.only forwart works.
Use this control...
https://synthiam.com/Support?id=47
and add the code that will run when the Forward() is called. i.e.
You can also have the code tell the AutoPosition to stop with the Stop motion
he will only move once,then nothing.i dont see I.E