
PRO
RoboHappy
USA
Asked
New Robot , REMI
Thought id share a look at this new kit I received from SuperDroidRobots. Its a 4wheel drive, mobil steel base. All motors are 24VDC. y plan is to move My Hemi bot, with its Actobotics framework over to this base instead.

Just getting started, so stay tuned

Nice work. I love how it's coming along. I'm glad you're building again and am looking forward to seeing more.
Hello again,
Just a small update on things...
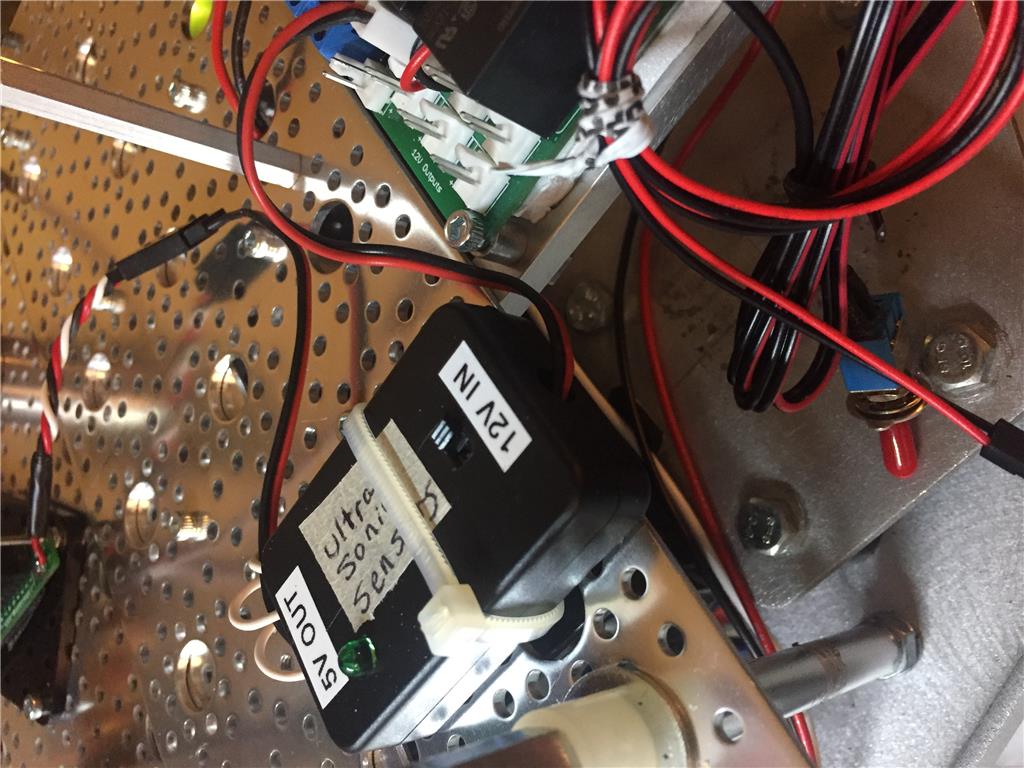
This is a simple 12v to5VDC converter I made using a simple switcher module picked up from Pololu (#5851), wired to a Servocity servo power distribution module to power up the 4 Ultrasonic sensors.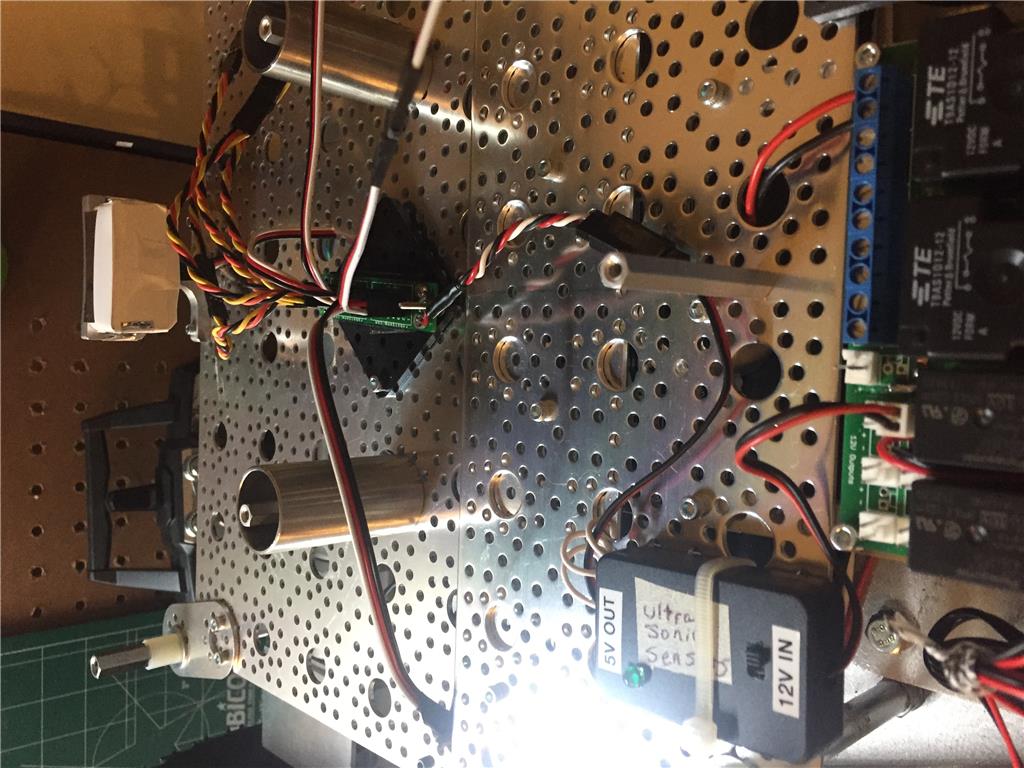
Another view of the wiring.Sadly, I now have to wait to do more testing. Somehow I did a rookie mistake and misaligned the 3pin servo wires onto the EZB unit, and managed to fry to fry it. Even worse, did it again on a second EZB (short circuit protection would have been nice) . Already contacted EZ-Robot to see what it will cost to repair the two units or maybe just replace them. At least I now realized how I managed to damage them though, will be way more careful now.
Heeeees Baaack.... lol Hey folks ! Remi, the robot is back. Slowly but surely back. After getting my two EZB units repaired (thank you Ez-robot) and dealing with a small family emergency, Im hoping to get back to finishing this project.
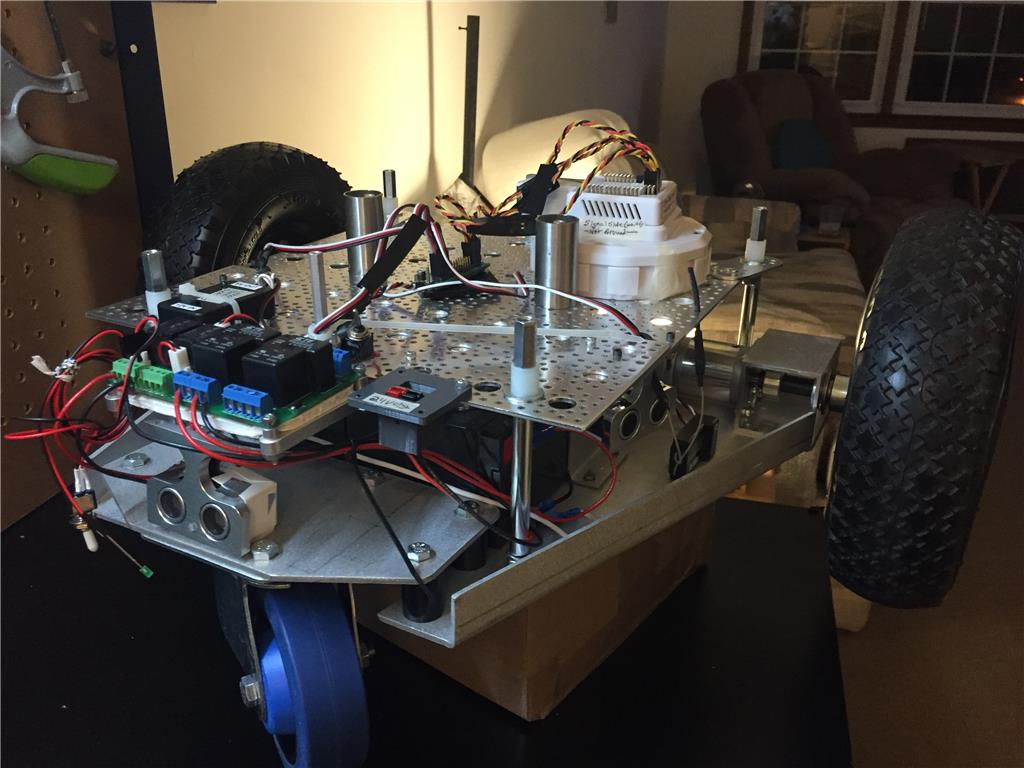
These are just a couple of current views of the Remi Base unit.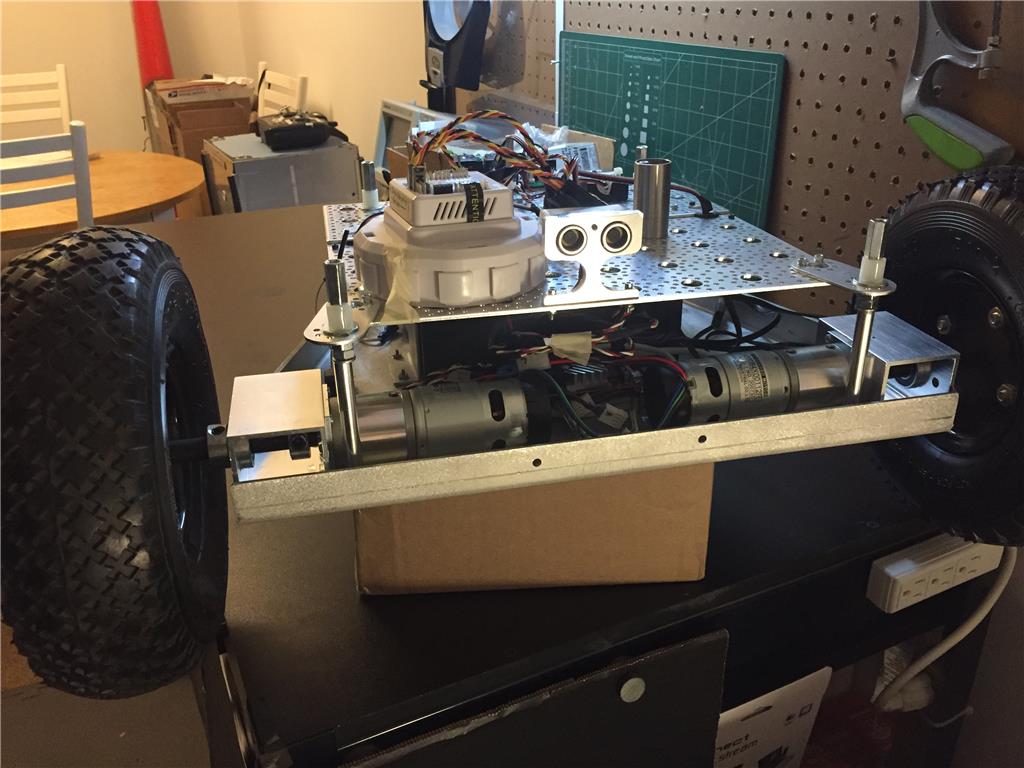
I am now back to testing the ultrasonic sensors and motor controller w/ encoders again before I move forward. I will also use r/c control for the drive as a manual drive option when not using the sensors . Also might ad bumper sensors. Would like to try the NMS feature at some point too. Hopefully soon, I can move onto adding the rest of the body from my old Hemi robot too.Great, things are shaping up, I will be watching your progress, thanks for the update.
Good to see you back! Have fun! I'm also back to working on my robot. It's a good feeling.
I'm looking forward to seeing your progress!
Hi Guys ! So I am back to working on REMI a lil bit. I'm right now trying to get the drive motor , using a robocloaw 2x15A motor and with a Ultrasonic sensor to work together. I am having a little trouble getting the sensor to read proper value and make the motors slow down. What happens now is when I tell the robot to move forward, the wheels do turn but for a short period then stop. This only happens when I have the ping sensor activated once the motors start forward. Mind you, the motors move forward just fine when the sensor is not involved. I had this working before on my Hemi robot, so im confused why its not working now.
Below is a snippet of the script, which has worked before (but now does not). I'm wondering if someone else can see something I don't. its been setup to only run forward sensor with the drive motors, and using D12 set to simple serial to the roborclaw and D16 for the 3wire ultrasonic sensor, and is suppose to make motors slow down as sensor reads lower values (robot getting closer to a wall example) then will stop.
This variable will be used to determine if we exit.
If it is a 0, we continue running
If it is a 1, we exit this script
$exit = 0
begin moving forward
#Forward()
:Start
Get the ping sensor value
$ping1 = GetPing(d16, d16)
If the ping sensor values are less than:
than 20, slow down or stop.
if ($ping1 < 45) goto(slow) endif if ($ping1 < 35) goto(slower) endif if ($ping1 < 20) goto(stop) endif
#read foot switch #if(GetDigital(D11)=1) goto(footsw) #endif
#read Emergency stop switch #if(GetDigital(D10) =1) Goto (stop) #ControlCommand("RGB Animator", AutoPositionAction, "Idle") #ControlCommand("Soundboard v4", Track_2) #endif
If the exit value is 1, exit the script
if ($exit = 1) goto(Exit) endif
Sleep(500)
Goto(Start)
:slow SendSerial(D12,38400,33) SendSerial(D12,38400,151) #sayEzb("slowing") #ControlCommand("RGB Animator", AutoPositionAction, "Slow") Return()
:slower SendSerial(D12,38400,49) SendSerial(D12,38400,167) #sayezb("much slower") #ControlCommand("RGB Animator", AutoPositionAction, "Slower") Return()
:stop Stop() SendSerial(D12,38400,64) #SendSerial(D12,9600,192) sleep(200) #SendSerial(D12,9600,0) SayEZB("Stopped") #ControlCommand("RGB Animator", AutoPositionAction, "Stop") stop() #Return()
:footsw SayEZB("Stopped") SendSerial(D12,38400,0) Stop() #endif #Return()
:Exit #Stop() #SayEZB("Received Command Stop") Halt()
=========================================================== This is were I am at atm , I wanna get this working proper again before I move onto anything else. If someone seems something odd, please advise, I love the input always. Thank you.
Progress! hehe
hehe
Does your robot say stop when this happens? If you have the variable watcher installed what is the value of $ping1 when it stops?
I'm guessing the reason that your robot keeps moving with the sensor unplugged is because the sensor is not sending any information and the script isn't receiving anything because of that. Therefore it thinks that everything is still all clear in front of it. I've never worked with these sensors but perhaps it is not positioned properly on the robot? Maybe it's seeing the robot itself or something mounted on it?
I tried your code with my IoTiny
it said stopped
:footsw SayEZB("Stopped") SendSerial(D12,38400,0) Stop() #endif #Return()
:Exit
orig
:footsw SayEZB("Stopped") SendSerial(D12,38400,0) Stop() #endif #Return()
:Exit #Stop() SayEZB("Received Command Stop") Halt()
****** SayEZB("Received Command Stop") Halt()
took ***** # off above went to the end