
PRO
RoboHappy
USA
Asked
New Robot , REMI
Thought id share a look at this new kit I received from SuperDroidRobots. Its a 4wheel drive, mobil steel base. All motors are 24VDC. y plan is to move My Hemi bot, with its Actobotics framework over to this base instead.

Just getting started, so stay tuned

Hi RoboHappy,
Great going, your project is shaping up
I still play around with the Prowler Robot Kit Chassis from ServoCity - 4 wheels, I can go forward and back, but can't turn left or right, too heavy, I guess.
EzAng
Just a quick little video of the new robot platform on the test bench. I was setting up the Sabertooth Movement Panel at the time.... https://youtu.be/KFDzuVtjIoU
More vids to follow .....
ROBOHAPPY's wheel base Video. Great work bud!
Here ya go. LOL. Your vid is showcased!
Nice work so far. What fun!
How much more setting up are going to need to do? Looks like the directions are not set up properly to the commands. Also is there a way you can get that Sabertooth to ramp up to full speed?
Any plans on using RC to move this big guy? I know it's very easy to attach an RC receiver to the ST and use a nice RC controller to control your wheel base. That would give you real nice ramping and control.
EDIT: After looking at your pictures a little closer it appears that you do indeed have an RC receiver attached. Wondering what your plans are for the Sabertooth movement panel? Will you be able to use ARC to control this along with the RC controller? I built a tank like wheelbase for my last big robot using a ST controller but only used RC. I wanted to control the wheels with both RC and ARC but couldn't figure how. To tell the truth, I really didn't look deeply into how. There must be a way.
Also that doesn't look like a Sabertooth Motor Controller. Is that RoboClaw? I'm really interested in this project and will be watching and asking. I hope you don't mind the questions.
@ EzAng, Thanks. Too bad Servocity has changed things a bit, I might be kinda outta luck I think if I have to replace one of the Actobotic servo gear sets.
@Hi Dave, Thank you for compliments. Good eye on the direction commands. I was trying to control the motors thru the Roboclaw motor controller via the Sabertooth Movement panel. But interestingly enough, I too discovered that the four built in directions were moving the wheels in the wrong directions, this had baffled me. I was looking how the commands were created, looked like done in the java script mode. I had to convert the left and right turn commands to Ezscript and all the directions worked correctly (maybe a bug in code??- don't wanna open a can of worms though). I also played around with the custom movement panel, and so far happy with trying different values to adjust speed.
Good eye on the direction commands. I was trying to control the motors thru the Roboclaw motor controller via the Sabertooth Movement panel. But interestingly enough, I too discovered that the four built in directions were moving the wheels in the wrong directions, this had baffled me. I was looking how the commands were created, looked like done in the java script mode. I had to convert the left and right turn commands to Ezscript and all the directions worked correctly (maybe a bug in code??- don't wanna open a can of worms though). I also played around with the custom movement panel, and so far happy with trying different values to adjust speed.
Before I started using EZB to control, I had an R/C receiver connected to the motor controller. I may plan on doing the same I did with Hemi, having both an AI control or R/C control for the drive systems. What I discovered is, these motors at full speed really move and its a bit jolting when you give the command to 'stop" , the bot almost tips over, so I am planning on much slower speed under the EZB, and the full speed when under R/C control. I had originally built me a small relay panel to switch back/forth from the R/C to AI, and want to do a better one now.
I also still want to do some ramping speed control. Esp because I will be using the EZB sonars. Haven't found anything on the site that looked to work for me just yet ( anyone got an idea? )
Next step soon is start building upwards. I have plenty of Actobotics metal to add more support structure. I plan on adding on long beam (the bots spine I guess) and want to see what tipping over issues I might have while the bot moves around.
Thanks, very interesting. I'm pretty sure you can set ramping rates in both the Sabertooth and Roboclaw motor controllers. Not sure if it can be done with the dip switches or you need to go into them with the setup software. Once set you won't need to worry about sudden stops and starts.
This happened to me on Mr. Metal, "too tall" is not so good, I figured out.
EzAng
EzAng, I too found that out when I was building HEMI . It would do the same jolting stop with the tracks. That robot is a mere 5 feet tall. I am hoping to make the new one 6 feet if possible. I did happen to buy a "kickstand" for the new platform as an option, to prevent the tipping. But I found that this piece of metal will slide along the floor, which is no good for me since I need everything to drive over things like door jams. Im hoping to bend this metal piece for the clearance I need. Will see...
. It would do the same jolting stop with the tracks. That robot is a mere 5 feet tall. I am hoping to make the new one 6 feet if possible. I did happen to buy a "kickstand" for the new platform as an option, to prevent the tipping. But I found that this piece of metal will slide along the floor, which is no good for me since I need everything to drive over things like door jams. Im hoping to bend this metal piece for the clearance I need. Will see...
Hello there. Just showing off a little addition to the platform. Excuse the mess. As you can see, I've added a platform, just above the batteries. I may add a second platform. This platform will house the EZB and other electronics and will serve as the main point that I will add more structure.
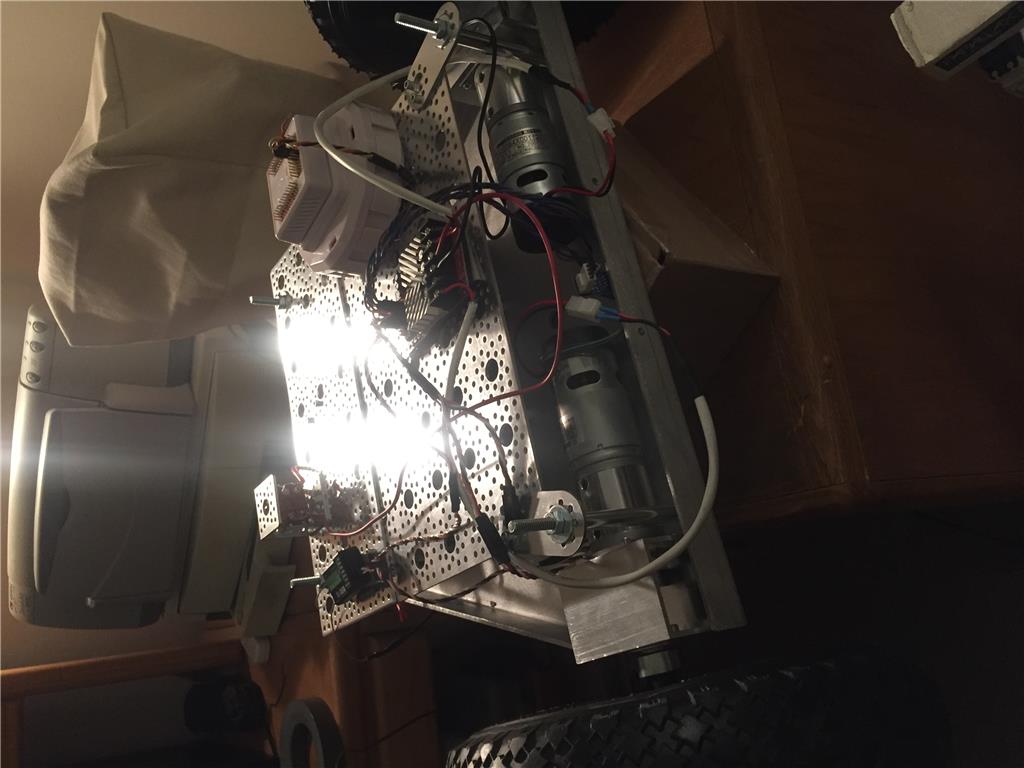
Now , If could just get these pictures to upload in the right orientation ,