
PRO
RoboHappy
USA
Asked
New Robot , REMI
Thought id share a look at this new kit I received from SuperDroidRobots. Its a 4wheel drive, mobil steel base. All motors are 24VDC. y plan is to move My Hemi bot, with its Actobotics framework over to this base instead.

Just getting started, so stay tuned

Looks Lika a nice project, will be watching your progress
https://www.superdroidrobots.com/ has some stuff
Thanks
While my programming might be a hinder, at least building will be a joy to do.
Thought Id update my project a little pic. Here are some photos of the SuperDroid Robot base I am working on. The frame is steel, this thing has got soem weight already.
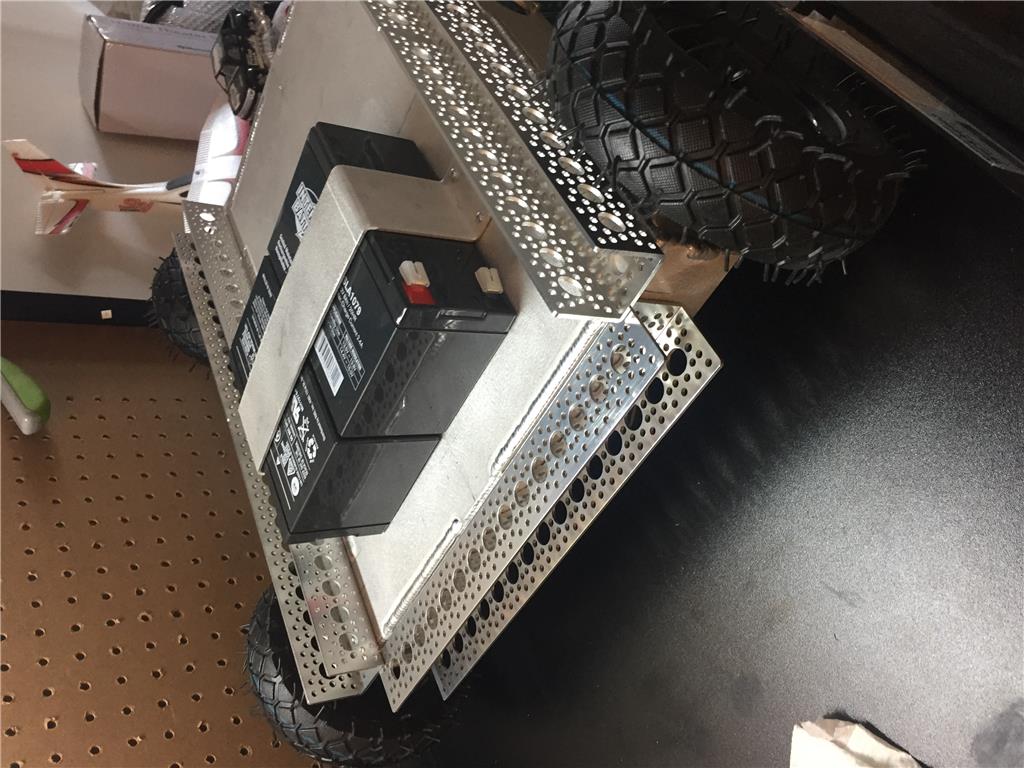
This mobile kit from SD, is a IG42-SB4 series....6" All rubber wheels, four 24VDC motors @ 240rpm (I may reduce), comes with a 2x12 Sabertooth speed controller and the two 12 8ah batteries. Ive started to adapt the Servocity Actobotics hardware onto it as well.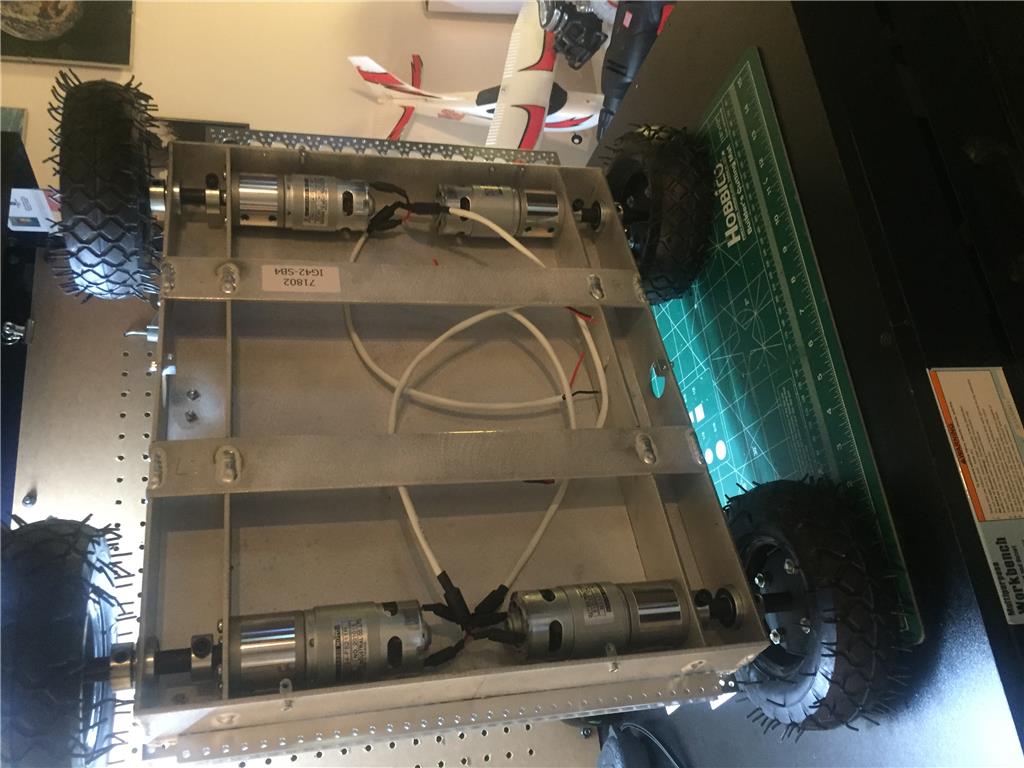
The underside. I Could have ordered a cover plate for it, but Im doing my own. which will made from clear plexiglass.
Prepping the motors...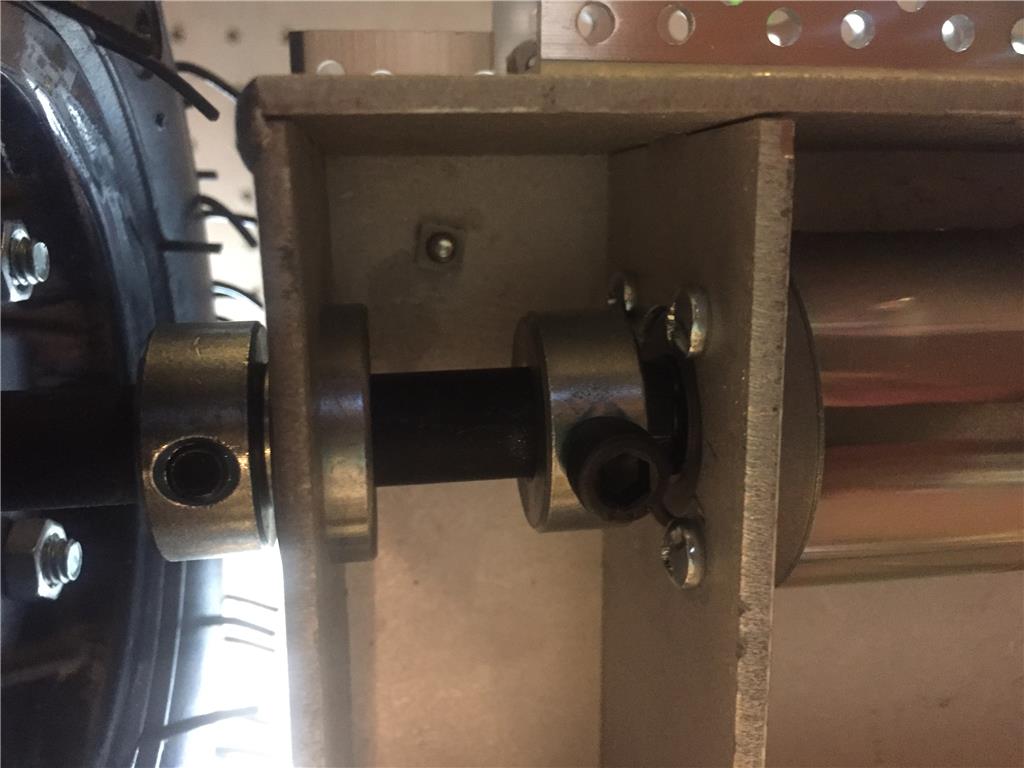
Close up view of the wheel assembly. Will be a pain if I need to change out the motors though.Looks like your project is getting underway.
A big vehicle.
I will be watching your progress, all my best.
be well
Hello again, So I've decided to make a big change to REMI's robotic base. I'm going from the 4 wheel skid steering platform that I showed above to now this 2 wheel base, also from SuperDroid Robots. It is a IG42-SB2 tube mount platform. It has 10 inch wheels and a caster at the rear. The motors 78rpm at 24V with quadra-encoders, connected to a Roboclaw 2x15 motor controller. This controller is simular to the sabertooth 2x12, with its built-in encoder setup and can also take simple serial commands from the Sabertooth Movement Panel or custom Movement Panel if desired. The Roboclaw can also be setup to run via an R/C setup as well, and am currently playing around with different drive speeds for better control.
Eventually, my ultimate goal for this redesign is to transfer the main body from my HEMI robot to this, as I have found out thru trial and error how bad both the the 4wheel base as well as the tank track setup (from Servocity) I first used ran horrible on the carpeting I have all over here. The two wheel design has proved to be much better on my carpet, as well on hard floors.
Stay tuned ....:)
What size is the base? Looking down the line to my Inmoov on a motorized base of some sort.
The overall dimensions for the base are 24 inch in Width, 20 inch in depth, 6 or 10 inch in height, depending on wheels used. Here is a link to the actuall drawing if interested for a lil more detail : https://sdr-files.s3.us-east-2.amazonaws.com/product_info/TP-111-042_drawing.pdf
Thank you! Wow those are \(\)! I think I can make for a lot less... I guess my build will be standing in one place for a while LOL.