
Describe Your Robot Arm For Kinematic Robot Skill
We are in the process of developing a dynamic configuration system for robot arms, which will be compatible with a variety of robot arms and joint numbers. We kindly request your valuable input regarding your robot arm configurations to make this system as versatile and effective as possible.
One of the critical aspects of this project is understanding the layout and specifications of various robot arms. Your insights and contributions will significantly aid in developing this dynamic configuration system. Here's what we're interested in:
1. Configuration Description: Please describe or provide a picture of your robot arm's layout. Share details such as the number of joints and a brief overview of each joint's axis of motion. For example, does the base servo rotate the arms UP/DOWN, LEFT/RIGHT, or have any other specific functionalities?
2. Joint Axis Information: Provide specific details about each joint, including its range of motion, degrees of freedom, and any unique features or constraints.
By sharing these pictures or details about your robot arm (or plans), you can help us build a more inclusive and adaptable system, accommodating a wide range of robotic arms with different configurations. This system will open doors to numerous applications, including object manipulation through camera detection, remote control via hand tracking in VR, and many more.
Feel free to reply to this message with your robot arm details. Thank you for your time and expertise!


This is the latest version. You can see the joints to make it more clear of where the joint starts and the length of it.
I have a 3d printable arm I designed for my online courseware classes. It was modelled and is set up to begin in this configuration:
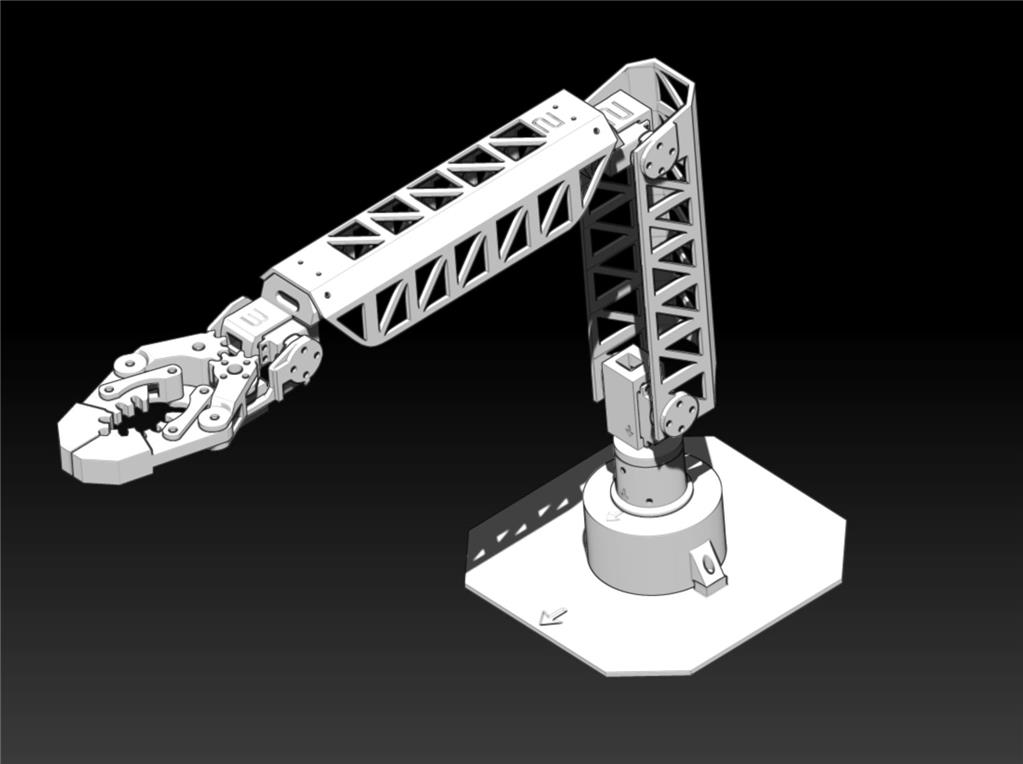
Base Rotation (180 degrees) First Joint (90) Second Joint (120) Wrist (180) Gripper (45) (No rotation on end effector yet)Assembled and First test:
Short movement cycle:
Will, noice. That's a perfect 3d print model - thanks for sharing. this robot skill will work well for it.
I added the ability to move joints up and down in the arm for reorganization...
Hey @will so are you going to share
@nink There will be several robots offered in my upcoming online courseware, including this one. Downloadable files will be available for purchase on my ecommerce store when they become available.
Will, I’m glad to hear that you’re starting a course. I’m excited to see what comes of it! Now I know why you’ve been so busy
I found the robot arm on amazon Canada available without the MG996 servos for a lower price (but order comes from china) also found it on aliexpress but they charge for shipping. https://www.amazon.ca/misppro-New-6DOF-Mechanical-Robot/dp/B0C4924JPT/ref=sr_1_4 https://www.aliexpress.com/item/1005005606163486.html I don't know these vendors so don't @me if they steal your money or send you a bad product.
If you scrounge around Thingiverse you can find all the parts to print. Here is a sample list I have not printed any yet. https://www.thingiverse.com/robotfoot/designs #U Bracket and servo Holder built in horn (I think) https://www.thingiverse.com/thing:4544347 #U Bracket desgined to work with Horn https://www.thingiverse.com/thing:4544344 #servo holder to work with a bracket https://www.thingiverse.com/thing:942114 #great collection of servo brackets https://www.thingiverse.com/thing:4179067 #gripper guards and a rotary base, Ubracket
Okay so it seems to be working. I am testing it with the robotis open manipulator, but i need to build a custom arm to make sure it works with that as well. I'll make one with ezbits and i'm sure it'll work fine. This is the configuration for the open manipulator and you can see it working really well....