
Describe Your Robot Arm For Kinematic Robot Skill
We are in the process of developing a dynamic configuration system for robot arms, which will be compatible with a variety of robot arms and joint numbers. We kindly request your valuable input regarding your robot arm configurations to make this system as versatile and effective as possible.
One of the critical aspects of this project is understanding the layout and specifications of various robot arms. Your insights and contributions will significantly aid in developing this dynamic configuration system. Here's what we're interested in:
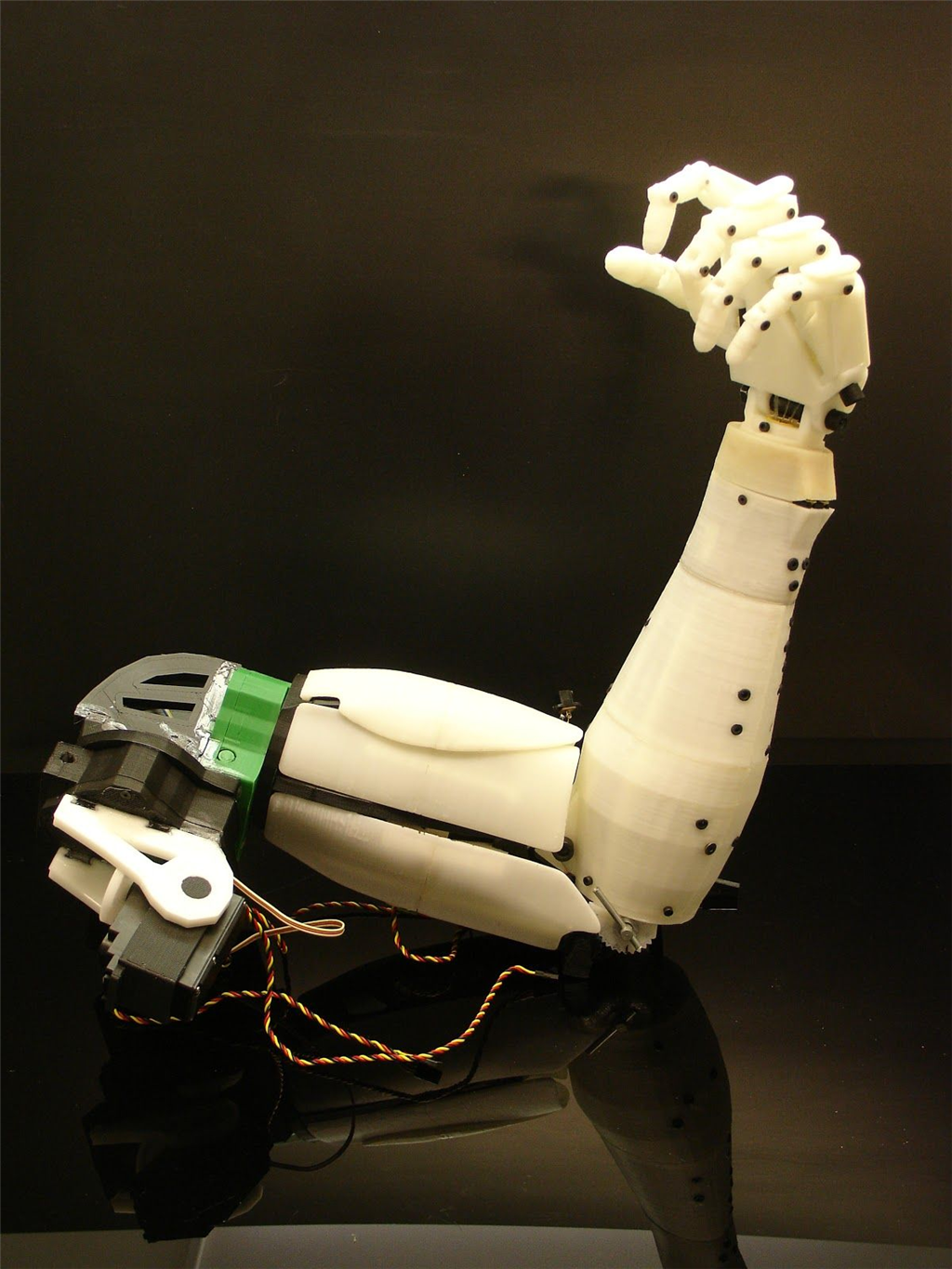
1. Configuration Description: Please describe or provide a picture of your robot arm's layout. Share details such as the number of joints and a brief overview of each joint's axis of motion. For example, does the base servo rotate the arms UP/DOWN, LEFT/RIGHT, or have any other specific functionalities?
2. Joint Axis Information: Provide specific details about each joint, including its range of motion, degrees of freedom, and any unique features or constraints.
By sharing these pictures or details about your robot arm (or plans), you can help us build a more inclusive and adaptable system, accommodating a wide range of robotic arms with different configurations. This system will open doors to numerous applications, including object manipulation through camera detection, remote control via hand tracking in VR, and many more.
Feel free to reply to this message with your robot arm details. Thank you for your time and expertise!


I am really looking forward to this. I have struggled in the past trying to get a robot to pick something up. I have to think armed with this, object recognition and perhaps a D435 to accurately pinpoint object location I will finally be able to teach Roli to play fetch. https://synthiam.com/Community/Questions/How-do-you-pick-something-up-20110
You can load and save configurations as well now...
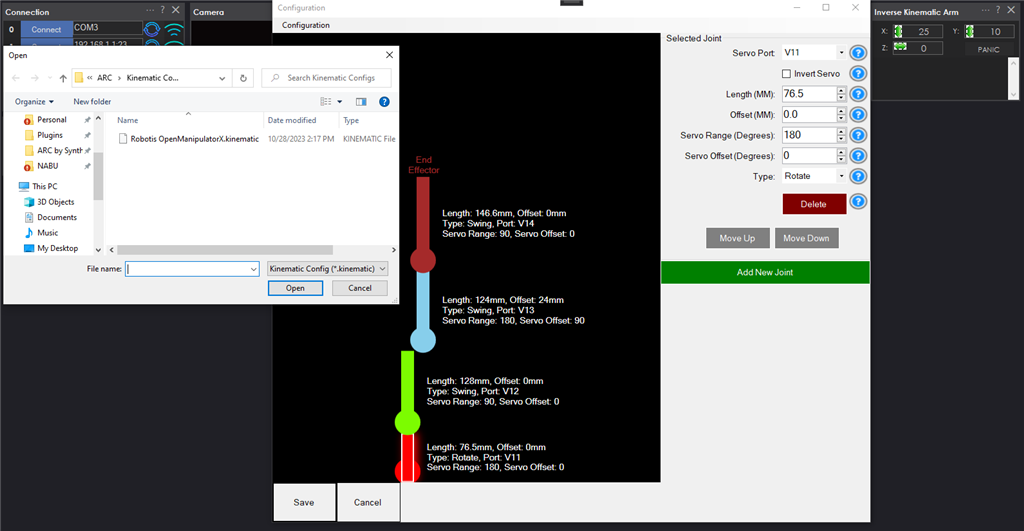
Seems like it's ready to go. I'll have to get someone to create a manual page for it and publish it. I can probably do that on Monday unless I find time this weekend. I'll be at my buddy's garage watching hockey tonight so i'm done for the day!Neat - i wanted to try quickly with a JD robot. Even though it's only 3 DOF + gripper, it works well!
This is the JD config...