Tutorial
Published
— Updated
Step 7 of 21
Step 6
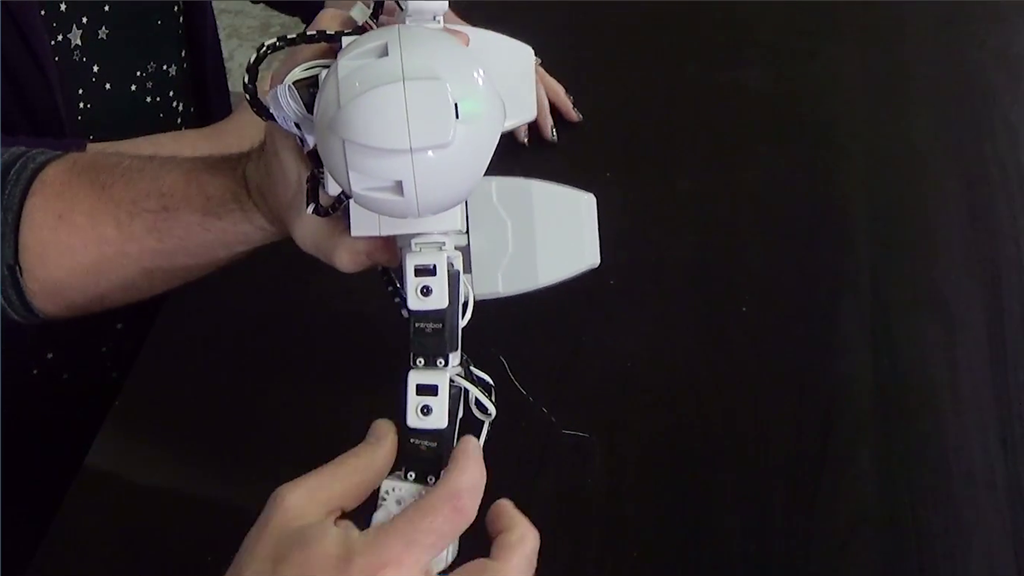
The servos of each arm and leg should be positioned in a straight line. Do not manually manipulate the servos when the robot is powered on.