
Tutorial
Published
— Updated
Migrating From EZ-Script To Javascript
Step 4 of 7
Case Sensitive
JavaScript, much like many programming languages, is case sensitive for variabes and functions. That means a variable named "MyVariable" is different than "myVariable". This applies to all variables, commands and functions.
Example
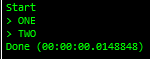
Here is an example program that demonstrates how the different case of a variable makes two different variables.var MyVariable = "ONE";
var myVariable = "TWO";
print(MyVariable);
print(myVariable);
The output of that example will demonstrate how ONE and TWO are both printed. This is because the case sensitive variable name is taken into consideration for that variable.

Wow that is totally great info to know, thanks!
Thanks for this Tutorial @DJ. It will be invaluable as I change over my many scripts from EZ Script to JavaScript! I'm excited to see how my robot's arm servo react to the new faster language. I have some pretty complex scripts (for me anyway. LOL).
I think you'll find that the new scripts you write will be even smaller and faster. Probably easier to read as well. I can always help you change some over if you post one. That'll give you examples of how the difference would be.
But just to be clear, the EZ scripts should still mostly work in Arc? I tried 2 that still worked no conversion. Just slower most likely.
Yeah, EZ-Script works in ARC. This is a tutorial to help people migrate to a faster and more feature-rich language.
Wow @DJ. That's an amazing offer. Thanks! I'll post one soon. I think I have covid now and need to get past that first. Can't quite thing straight right now. LOL.
Oh boy, it seems everyone is getting covid these days. I'm feeling left out. I hope you're doing well and binge-watching a lot of tv! Drink soup and dream about robots.
Thanks DJ. I'm coming to the end of it I hope. Feeling better. Don't feel left out. Only good thing about this is now I have some antibodies for a while. LOL. Stay healthy!