
Hello everyone !
This is a continuation of my post I misplaced! https://synthiam.com/Community/Questions/1007
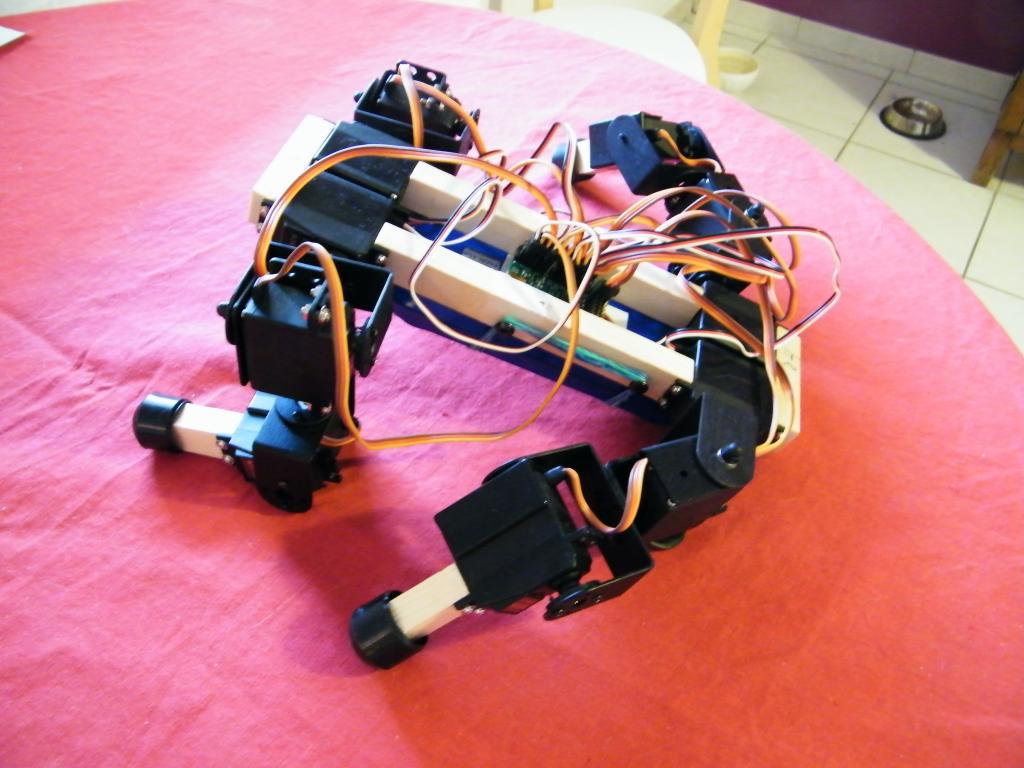
This post will present the realization of my robot dog of my dreams for years.
It can detect obstacles, search light, feel the caress on the back, focus on movements and faces, play ball and lots of other nice thing with the generator of personality (limited by my imagination ) through the amazing EZB
) through the amazing EZB
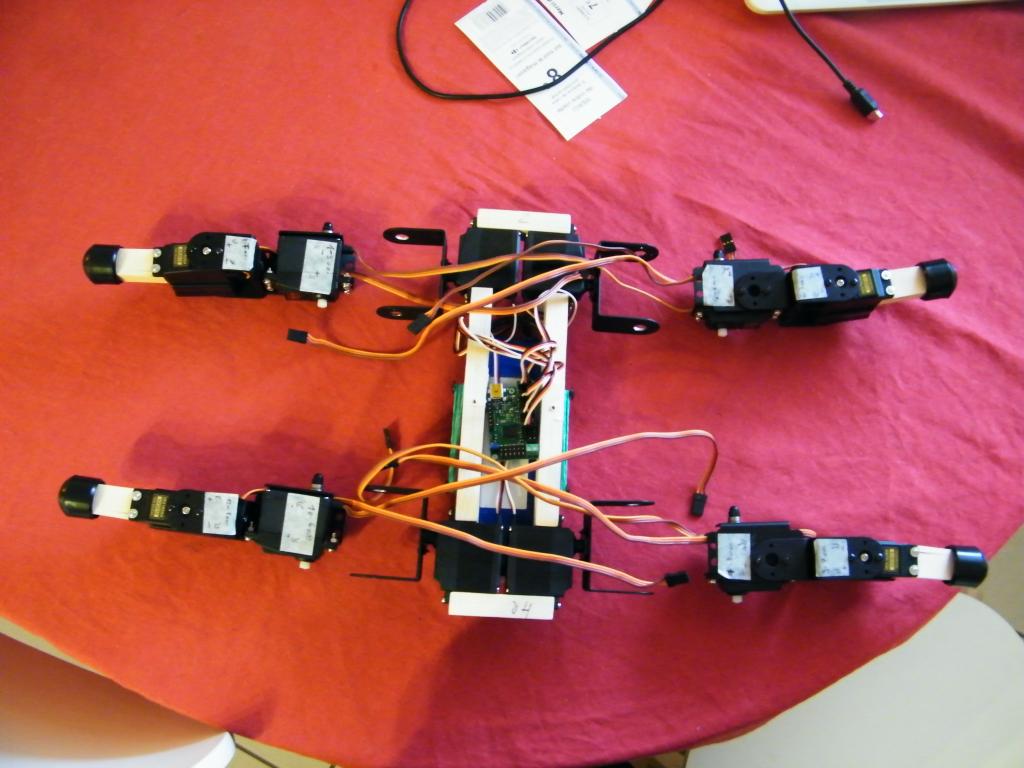
I use 12 servos for the legs (4 futaba S3010 and 8 Hextronik HX5010) and 5 different small servos for movement of the head, mouth and finally the tail.
The head is made from a Logitech speaker and hides the camera , a sharp GP2D120 ,2 light sensor , and 2 white LED who will blink randomly like "real" eyes controlled by small arduino nano to save port on EZB.
The ears are made with an inner tube tire.
The body will host the EZB, Pololu Maestro 18, in the future MP3 trigger from Sparkfun with some dog sound.The battery is a 3S4500 Lipo.The servo power regulation is done by this regulator
Here a little video (gait is better now ,more fluid)
I hope my English is understandable Following soon!


Discover more robots

DJ's ARC Overview

Charleybot's Project Multi-Omnibots 2000
-634767667799482421.jpg)

Way cool ! How does the EZ-B and Pololu Maestro 18 work together ? JW
Love it - You can take it for a walk without a doggy doo bag.
Cheers
Hazbot
Hmm picking up doggie doo , that's a robot project , I wonder if there is a stink sensors or methane sensor it could use to identity doo doo. , nice work ! You should buy a stuffed dog toy , gut the stuffing out and put it on your project as a skin!
He is FANTASTIC! Nice work.
I really like that ! Nice work and quite a challenge. Perhaps the Doctor should have a K9 mk2
That is really....Awesome! And you don't have to poopie scoop or have this big dog taking up the bed.
Lightbulb.... maybe I can replace mine. Anyone want two big dogs? One OLD boxer and one 3yr old pitbull. (Pitbull likes to eat couches and stuffed animals)
Samantha